ROS入门学习之安装
ROS探索之旅
1.安装ubuntu
我使用的博客链接如下,建议安装版本18.04(ubuntu20.04的新版本有些地方兼容性不是很好)
优先参考第三个博客
Win10下安装Ubuntu20.04,看这一篇就够了
win10 + Ubuntu 20.04 LTS 双系统安装
大致流程是
- 制作启动盘
下载ubuntu的镜像文件,在官网找到18.04版本,要有一个U盘,确保里面没有重要文件(U盘会被格式化),用UltraISO来制作启动盘 - UEFI启动设置
不同电脑的设置不同,开机时按F2(或者F6等)进入BIOS界面,然后更改设置,参考博客 - 安装ubuntu并分配空间
重启后就会进入到ubuntu的安装界面,其中重要的是分区,根据自己的磁盘空间看准再分。
设置用户名时候记得不要用中文用户名
2.ubuntu安装后的优化
安装一些常用软件及界面美化
-
首先肯定是换源(搜一下就好)
-
然后可以美化一下引导界面:
win10 + Ubuntu双系统 引导界面美化 -
更改输入法、主题等等:
Ubuntu18.04 安装后应该做的事
里面还有一些杂七杂八的,想做就做。 -
耳机没声音的解决方案:
安装音量控制软件sudo apt install pavucontrol在终端输入
pavucontrol就能打开该控制软件
![音量控制]()

然后将Headset Microphone(plugged in)改为Headphone Microphone(plugged in)即可,但是每次开机都要改,太过繁琐。
3.安装ros,重头戏!!!
首先ubuntu不同的版本对应ROS不同的版本,ubuntu18.04对应于Melodic版本,安装过程如下:
-
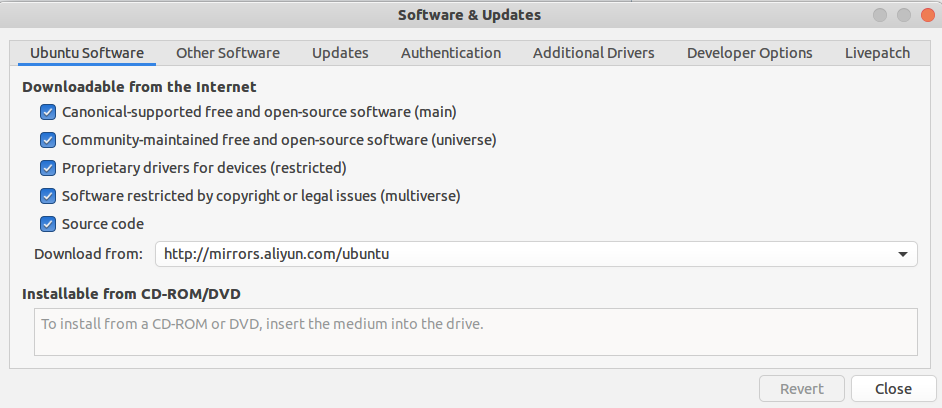
换源并配置软件仓库
![software & updates]()
将universe、restricted、multiverse打上勾 -
设置电脑以从package.ros.org接收软件
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' -
添加公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 -
安装
首先更新一下更新可用软件包列表sudo apt update -
然后安装桌面完整版ROS
sudo apt install ros-melodic-desktop-full -
安装完成后进行初始化
sudo rosdep init可能会遇到初始化失败的问题
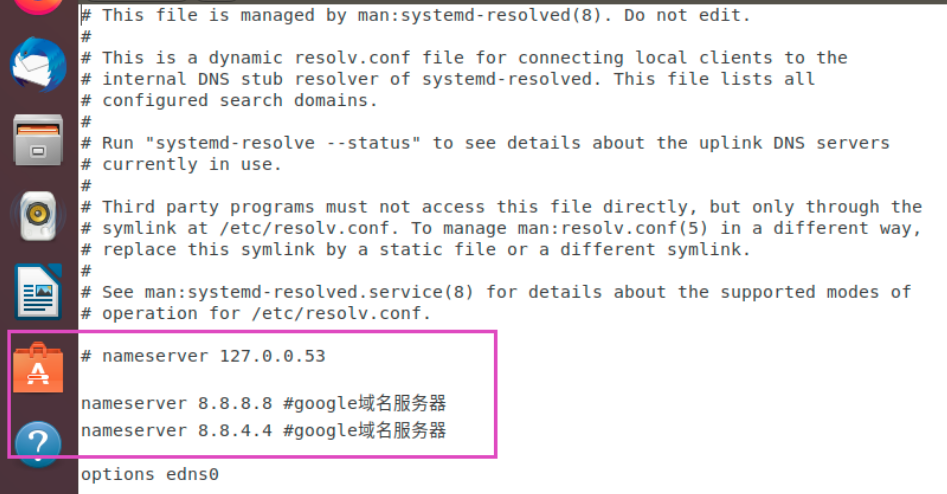
第一种可能的情况是找不到命令,这时输入sudo apt-get install python-rosdep python-wstool ros-melodic-ros第二种可能的情况是
![]()
打开配置文件sudo gedit /etc/resolv.conf改为如图所示即可:
![]()
最后执行rosdep update -
设置环境、构建依赖
将ROS添加到环境变量echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc source ~/.bashrc安装依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential -
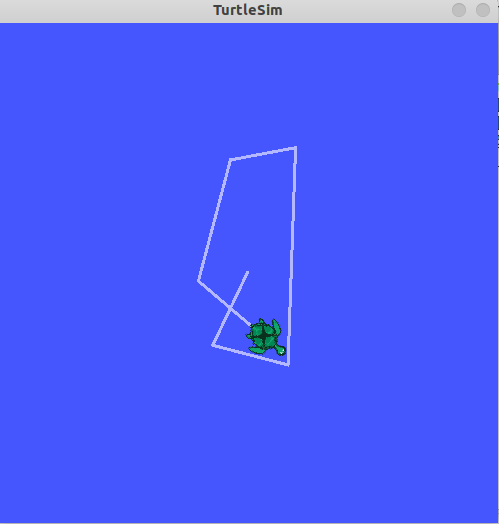
检验是否安装成功
在第一个终端输入roscore第二个终端输入
rosrun turtlesim turtlesim_node第三个终端输入
rosrun turtlesim turtle_teleop_key就可以用方向键控制小海龟移动啦!
![turtle]()


 浙公网安备 33010602011771号
浙公网安备 33010602011771号