无刷电机学习
转眼间已经工作好几个月了。上了班后才知道学习时间只能抽空去搞。忙里偷闲学习下电机控制。
学习参照的是正点原子的直流无刷电机驱动教程。
直流无刷电机简介
直流无刷电机(BLDC)是指无电刷和换向器的电机,又称无换向器电机。
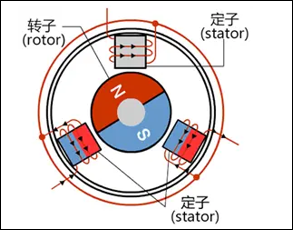
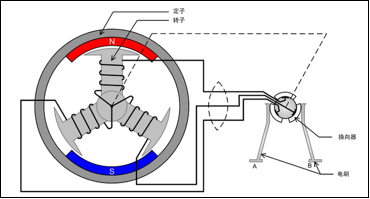
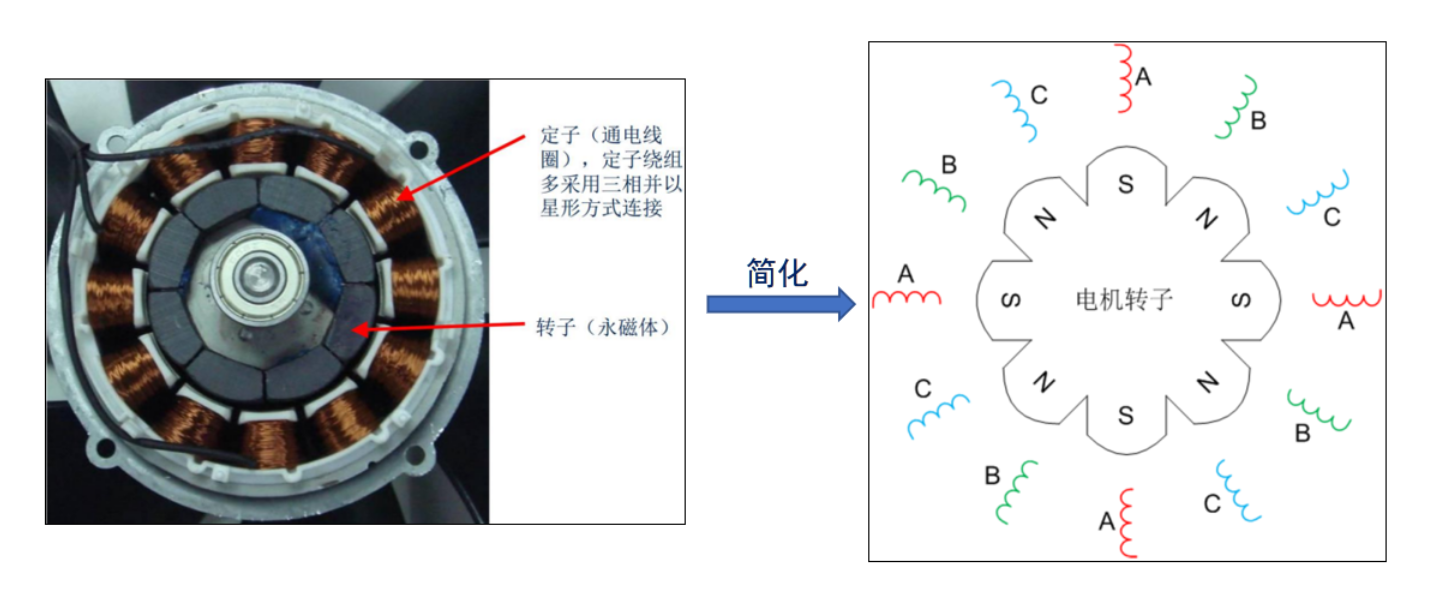
有刷电机原理:
从上图中可以看到无刷电机和有刷电机的定子和转子是相反的。无刷电机的定子是线圈。转子是永磁体。有刷电机的话定子是永磁体,转子是线圈,这是其中一个区别。并且有刷电机还多了换向器和电刷这两个结构。具体作用如下:
换向器切换线圈中电流的流向,反转磁极的方向,使其始终向右旋转。电刷向与轴一同旋转的换向器供电。
可以详细看该图:
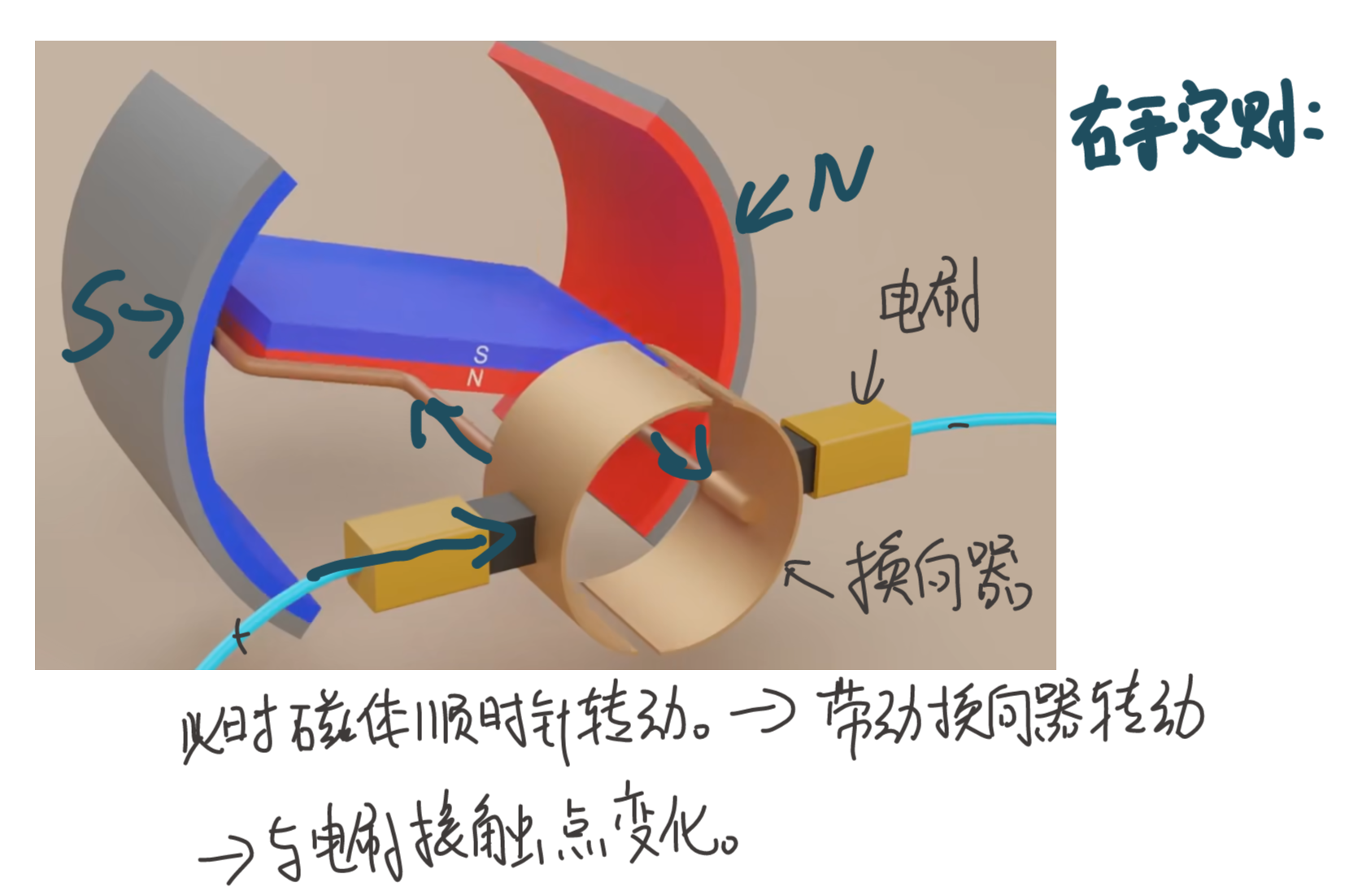
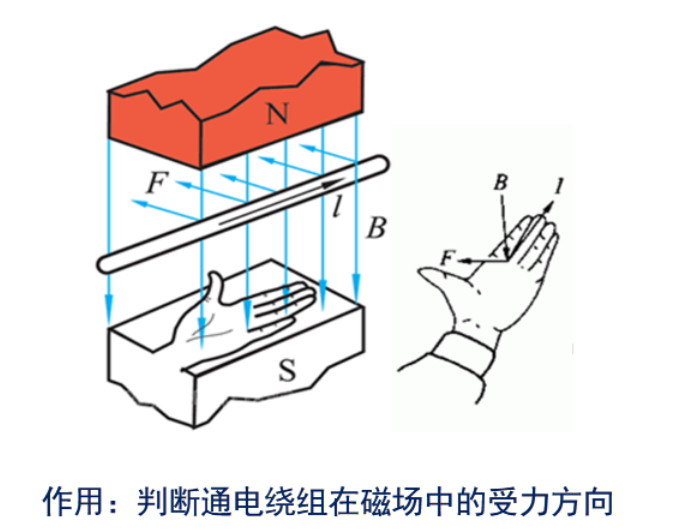
简化版可以看上图,上图的换向器可以看做铜片1和铜片2组成,刚开始电流方向是从铜片1->铜片2.因此根据右手定则,可以得到里面线圈的磁场方向。因此顺时针转动带动换向器转动。进而铜片2和铜片1交换方向。电流在线圈的流向发生改变。因此NS再次调转。从而可以持续不断地转动。
如果上述理解不清楚的话也可以用左手定则:
我们可以把有刷简化为下面这两幅图:
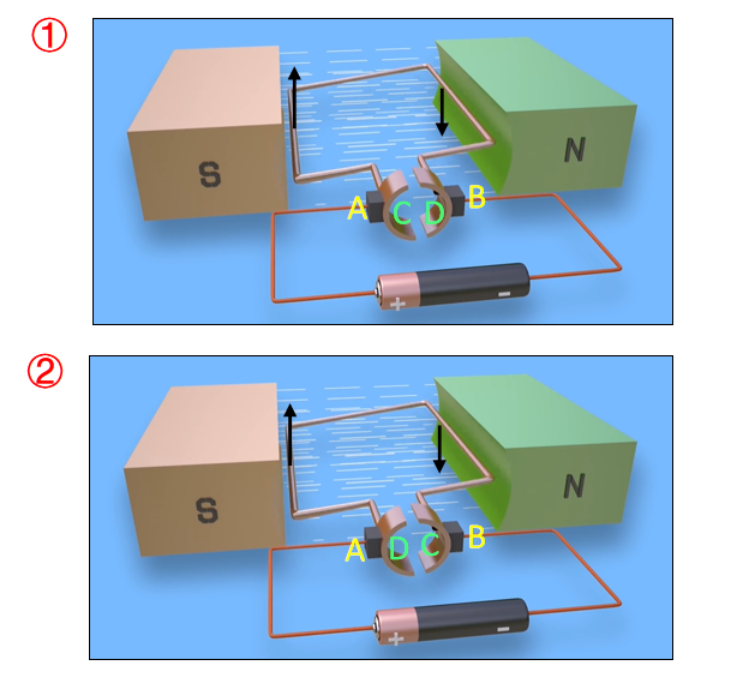
序号1为初始状态,左手定则可以看出左边受力向上,右边受力向下。因此顺时针。
旋转180度后,由于换向器的作用,D和C交换了位置。此时根据左手定则受到的力依旧没发生变化。因此继续顺时针旋转。这就是换向器的作用。想要反转,就改变电流方向。
无刷电机原理:
无刷电机分类:
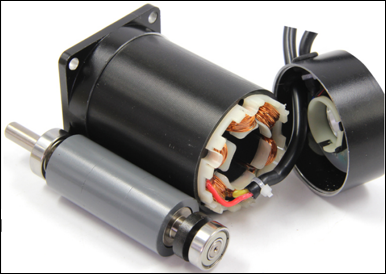
分为方波驱动和正弦波驱动。方波驱动的又分为外转子和内转子BLDC。正弦波驱动的为永磁同步PMSM。前两幅图分别为内转子和外转子BLDC。第三个图为永磁同步电机。


BLDC和PMSM的不同点:

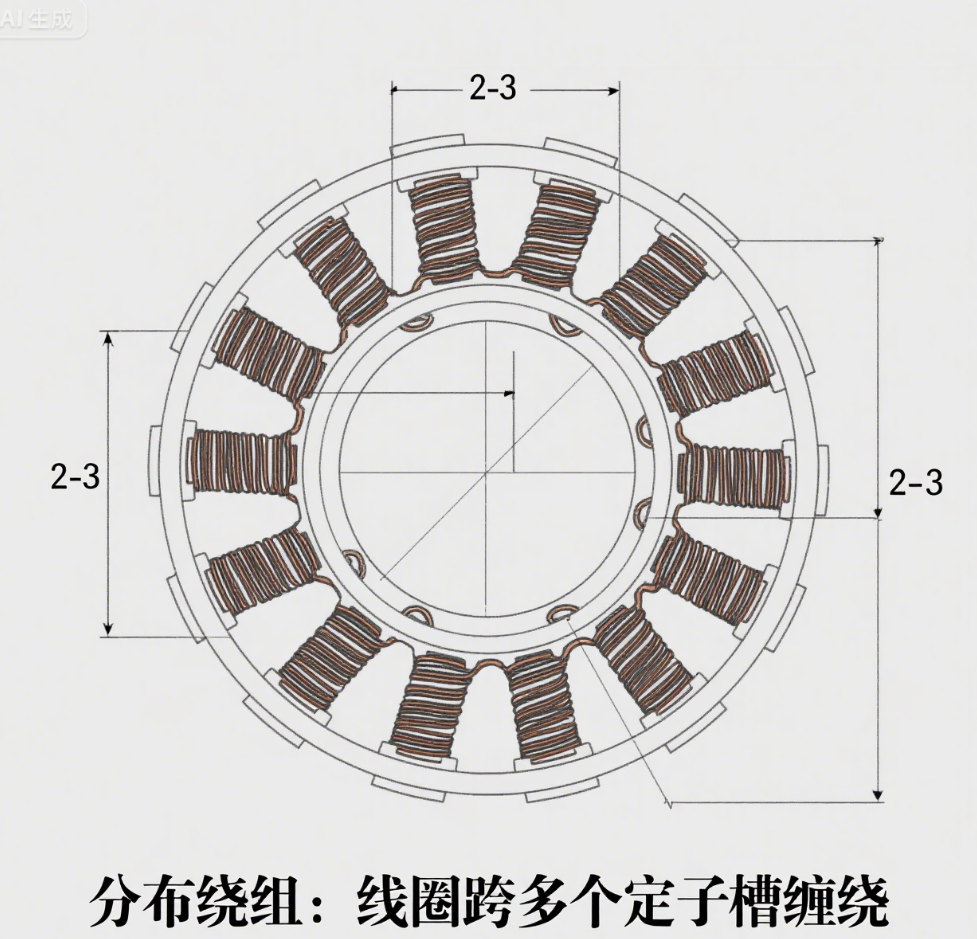
其中集中绕组和分布绕组具体如下图:

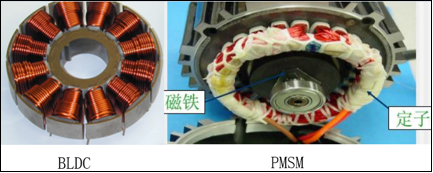
并且BLDC是绕组两两导通,PMSM是三组一起导通。
无刷电机的主要参数
极对数
定义:转子磁铁NS级的对数,它和电机旋转速度密切相关, 关系为:电角速度(电子速度 )= 电机实际机械速度 × 极对数。电角速度单位一般是弧度/秒,电机实际机械速度单位常用转/分钟(RPM)。
举例:假设有一台无刷直流电机,其极对数为3。如果电机实际转速是1000RPM,将其换算为弧度/秒(1RPM = 2π/60 弧度/秒) ,1000RPM对应的机械角速度是\(1000\times\frac{2\pi}{60}=\frac{100\pi}{3}\)弧度/秒 ,那么电角速度就是\(\frac{100\pi}{3}× 3 = 100\pi\) 弧度/秒。在交流电机的旋转磁场理论中,极对数决定了旋转磁场的转速,极对数越多,在相同电频率下,电机实际转速就越低。
KV值
定义:表示电机在单位电压下的空载转速,单位是RPM/V(转/分钟/伏特) ,电机转速 = KV值×工作电压。KV值越大,意味着在相同工作电压下,电机转速越大。
举例:有一款航模电机,它的KV值是2200。当给它提供11.1V的锂电池(常见航模电池电压)时,根据公式可算出电机的空载转速为 2200×11.1 = 24420RPM。也就是说,这款电机在11.1V电压下,每分钟可以空转24420圈 。如果换用7.4V的电池,那空载转速就是2200×7.4 = 16280RPM。
额定转速
定义:电机在额定电流下的空载转速,通常单位用RPM(转/分钟)表示。它是衡量电机在标准工作条件下的转动快慢的参数。额定电流是指电机长时间正常运行时,允许通过的最大电流值。
举例:一台小型直流电动机,其额定电流为2A,额定转速标注为3000RPM。这就意味着,当这台电机接入合适的电源,并且通过它的电流稳定在2A ,没有机械负载(空载)的情况下,它每分钟会转动3000圈。如果实际运行电流偏离额定电流,电机转速可能会发生变化,比如电流过大,电机可能发热严重甚至转速下降;电流过小,电机可能无法达到额定转速。
转矩
定义:电机中转子产生的可以带动机械负载的驱动力矩,通常单位为牛·米(N·m)。转矩反映了电机带动负载的能力,转矩越大,电机能带动的负载就越重。
举例:以电动螺丝刀为例,一款电动螺丝刀电机的转矩是5N·m 。在拧螺丝时,如果螺丝受到的阻力矩小于5N·m,电机就能轻松带动螺丝刀头将螺丝拧紧;但如果螺丝生锈等原因导致阻力矩增大到超过5N·m ,电机就可能带不动螺丝刀头,出现拧不动螺丝的情况。再比如电动汽车,电机转矩大,就能在起步和加速时提供更强的动力,快速提升车速 ,并且能适应爬坡等需要较大驱动力的工况。
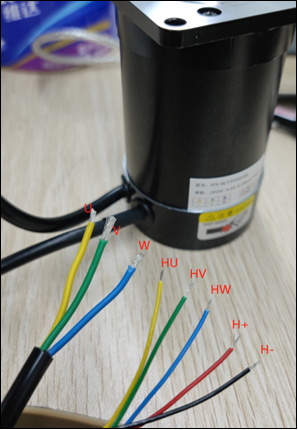
用的是正点原子的无刷电机:
引脚定义如下:


无刷电机驱动原理
需要对无刷电机内部结构图进行简化:
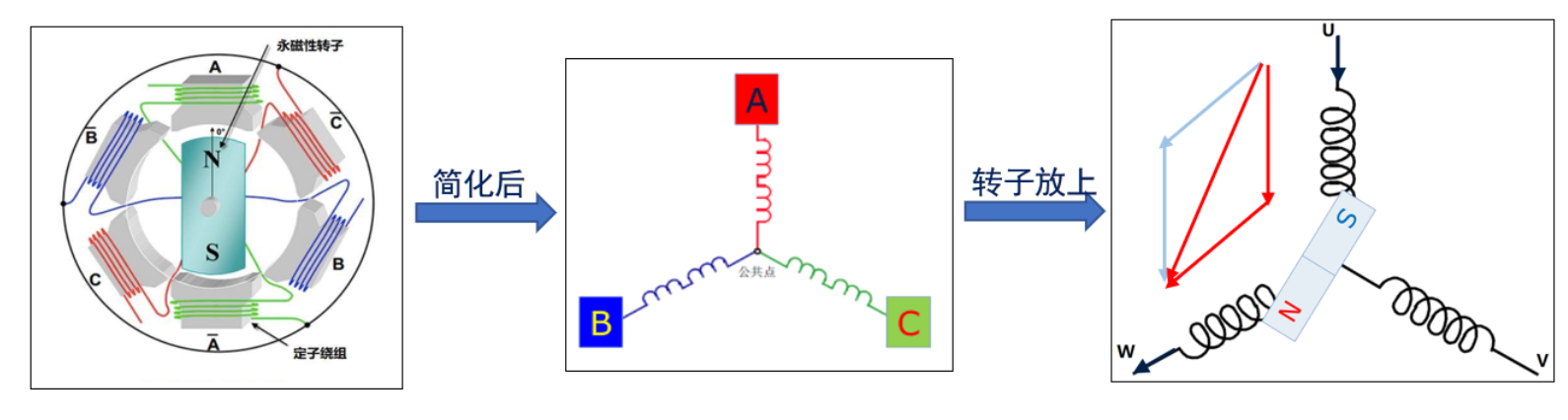
因此从上图可以看到最终简化出来的模型:
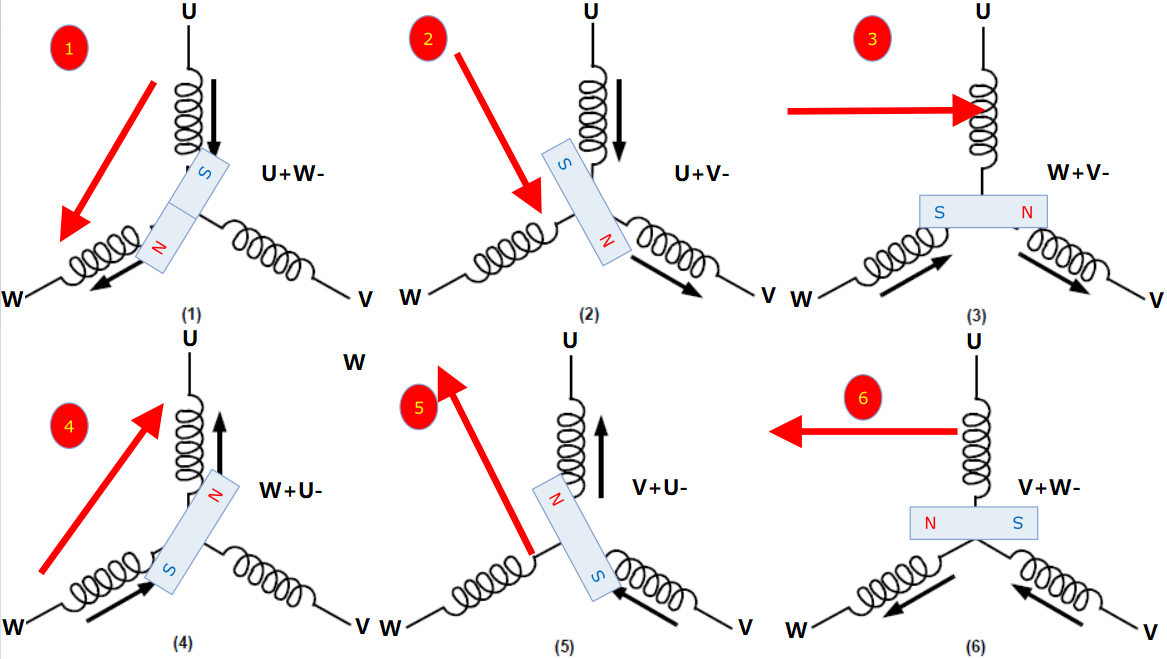
我们可以看到UVW两两通电有这些组合。一共包含6种。
看到这里大家可能会有疑问:
为啥红色箭头指的方向就是电机转轴在的位置呢。下面我来画图分析一下:
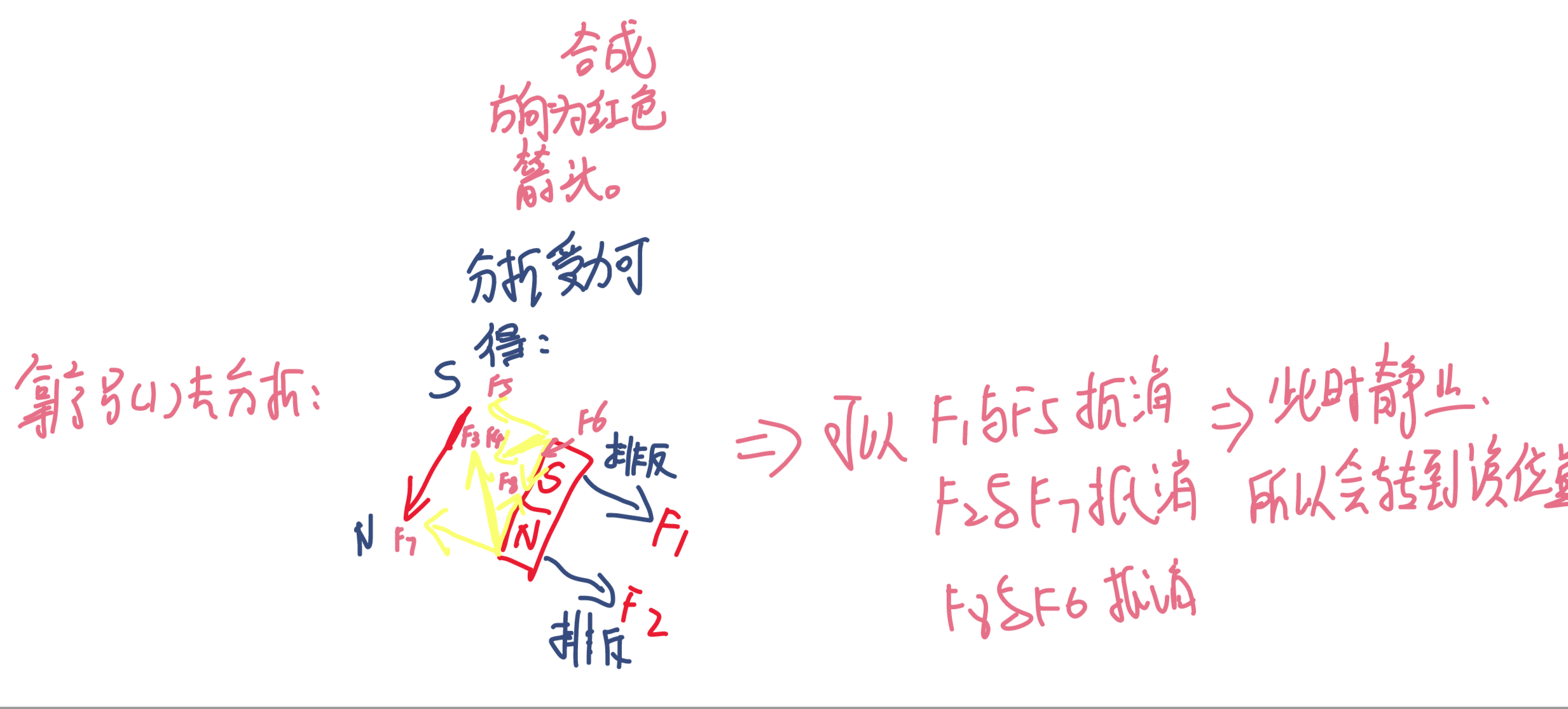
可以看出来,在该位置达到稳定,因此电机转轴对应该位置。同理可以分析出来这6种组合的情况。
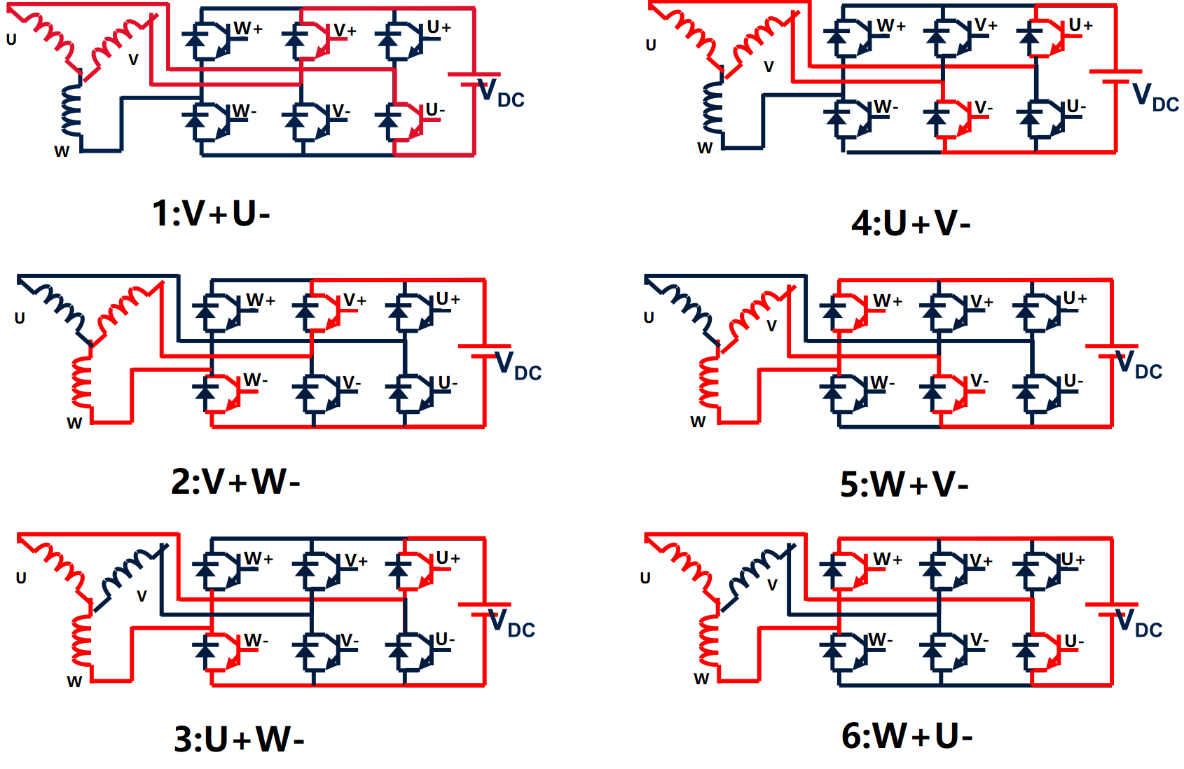
因此有以下六种情况:
- 给 U 接 24V、V 悬空、W 接 GND,此时电机的转轴对应上图(1)的转子位置。
- 在上一步的基础上修改接线方式,给 U 接 24V、V 接 GND、W 悬空,此时电机的转轴对
应上图(2)的转子位置,相较于(1)旋转了一个角度。 - 在 2.的基础上继续修改接线方式,U 悬空,V 接 GND,W 接 24V,此时对应(3)。
- 在 3.的基础上继续修改接线方式,U 接 GND,V 悬空,W 接 24V,此时对应(4)。
- 在 4.的基础上继续修改接线方式,U 接 GND,V 接 24V,W 悬空,此时对应(5)。
- 在 5.的基础上继续修改接线方式,U 悬空,V 接 24V,W 接 GND,此时对应(6)。
同样的,如果顺序相反则无刷电机会反向旋转。同步进电机类似,实际上步进电机也算
是无刷电机,所以无刷电机也会存在步进电机那样的问题,即丢步,原因也是定子产生的磁
场没有来得及改变转子的位置,详细原因如下:
- 指令太急:无刷电机靠控制器发信号来改变定子磁场,实现换相转动。要是给控制器的换相指令发得太快,就像一直催一个人做事,它处理不过来,没办法及时发出下一次换相指令,电机就没法按预想的换相。
- 手脚太慢:电机里的一些电子零件,比如MOSFET ,它们在接通和断开电流的时候需要一点时间。要是换相指令变得太快,这些零件还没准备好,就会影响定子磁场正常建立,导致磁场没法及时推动转子。
- 太胖刹不住:无刷电机的转子有一定重量,就像一个胖人跑起来后很难马上停下或者转向一样,转子也有惯性。当我们突然要求它改变转动方向或者速度,它没办法一下子就跟上定子磁场的变化。
- 背的东西太重:要是电机带动的东西太重了,超过了它的能力范围,电机就很难按我们希望的那样转动。比如电机拉一辆超载的车,在换相的时候,就没力气把车拉动到该去的位置。
- 电流拖后腿:无刷电机定子绕组有电感特性,就像水流过弯弯曲曲的管道会受到阻碍一样,电流变化也会被电感阻碍。这样一来,定子磁场想要改变强度和方向,就没办法一下子完成。在快速换相的时候,新磁场不能马上到位,也就没法好好推动转子。
- 磁性“迟钝”:电机里的磁性材料有点“迟钝”,也就是磁滞现象。当我们想改变定子绕组的电流来改变磁场时 ,磁性材料不能马上跟着变,实际产生的磁场和我们想要的不一样,就影响了对转子的驱动。
- 有人捣乱:无刷电机工作的环境里,可能有一些设备会产生电磁干扰,就像有人在旁边大声喧哗影响你学习一样,这些干扰会影响控制器正常工作,让控制信号出错或者延迟,定子磁场就没法准确控制转子。
- 自身不稳:要是无刷电机的控制系统设计得不好,比如调节速度或者位置的参数没设置对,系统就会像走路不稳的人一样,摇摇晃晃或者反应慢半拍,定子磁场和转子位置就没办法配合好,出现丢步情况。
无刷电机驱动电路
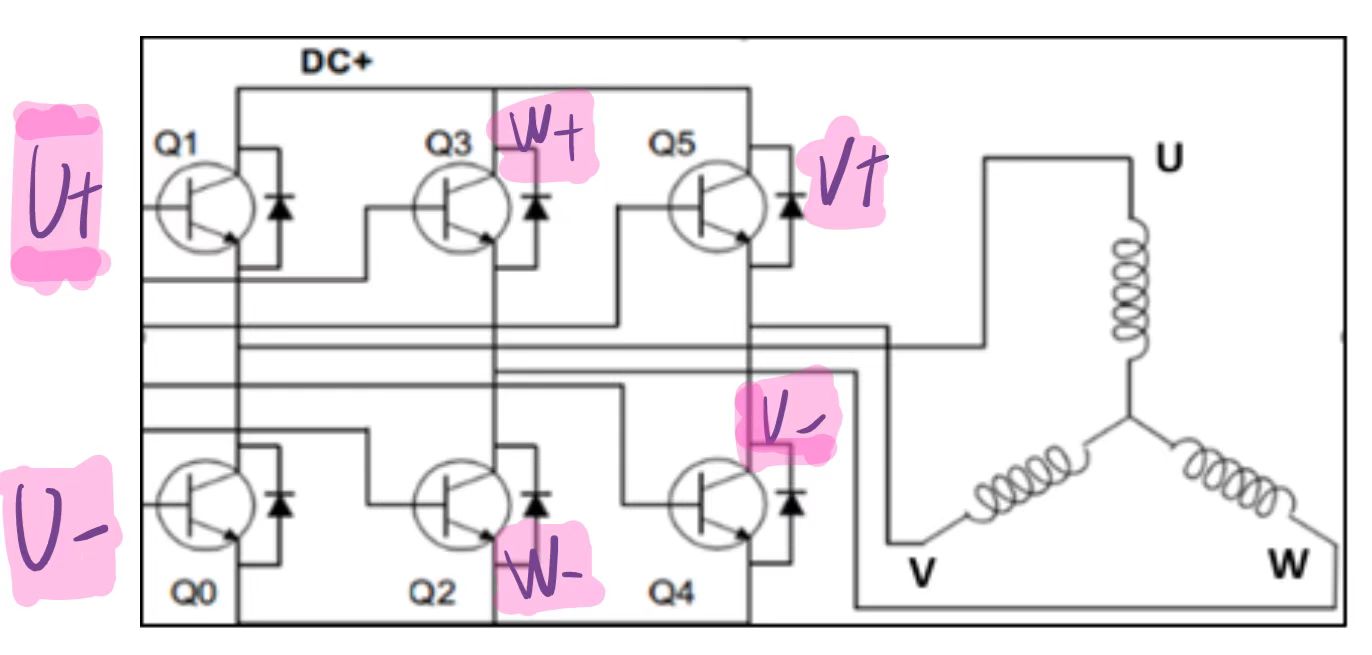
从无刷电机的驱动原理我们可以得到:U相 V相 W相在6种状态中有时候需要接正极,有时候需要接负极。因此需要能够简单方便控制三相极性的切换。因此使用三相逆变电路来实现。
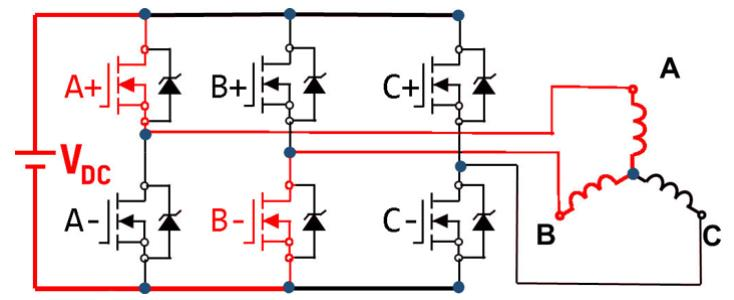
所谓的三相逆变电路就是由三个半桥构成的电路,图 21.2.9 中的 A+与 A-为一个半桥,
B+与 B-以及 C+与 C-各自又为一个半桥,共三个半桥;这三个半桥各自控制对应的 A、B、
C 三相绕组;当控制 A 的上桥臂 A+导通时,此时 A 相绕组接到电源正,当控制 B 的下桥臂
B-导通时,此时 B 相绕组接到电源负,所以此时电流由 A 流向 B。
所以想要控制绕组的极性,只需要控制绕组对应半桥的“上桥臂导通”或者“下桥臂导
通”就可以实现控制该相连接至“正极”或者“负极”了,但是要注意不可以同侧半桥上下
桥臂同时导通,会短路,烧毁电机!因此为了实现6步控制,如下图所示:
但是上述这种方式相当于直接把电源电压加在了电机上,电机速度一下子飙升到最大。所以一般实际控制我们都是采用PWM去控制。因为PWM可以控制占空比的大小,占空比的大小决定进入电机实际能量的多少。因此可以通过改变占空比控制转子扭矩和转速。
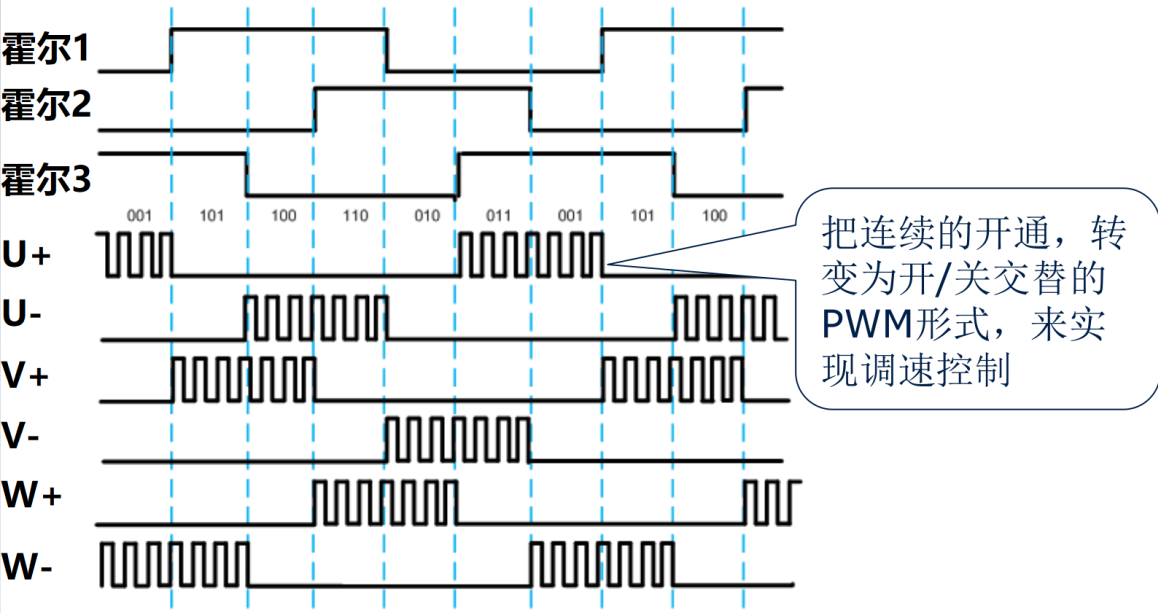
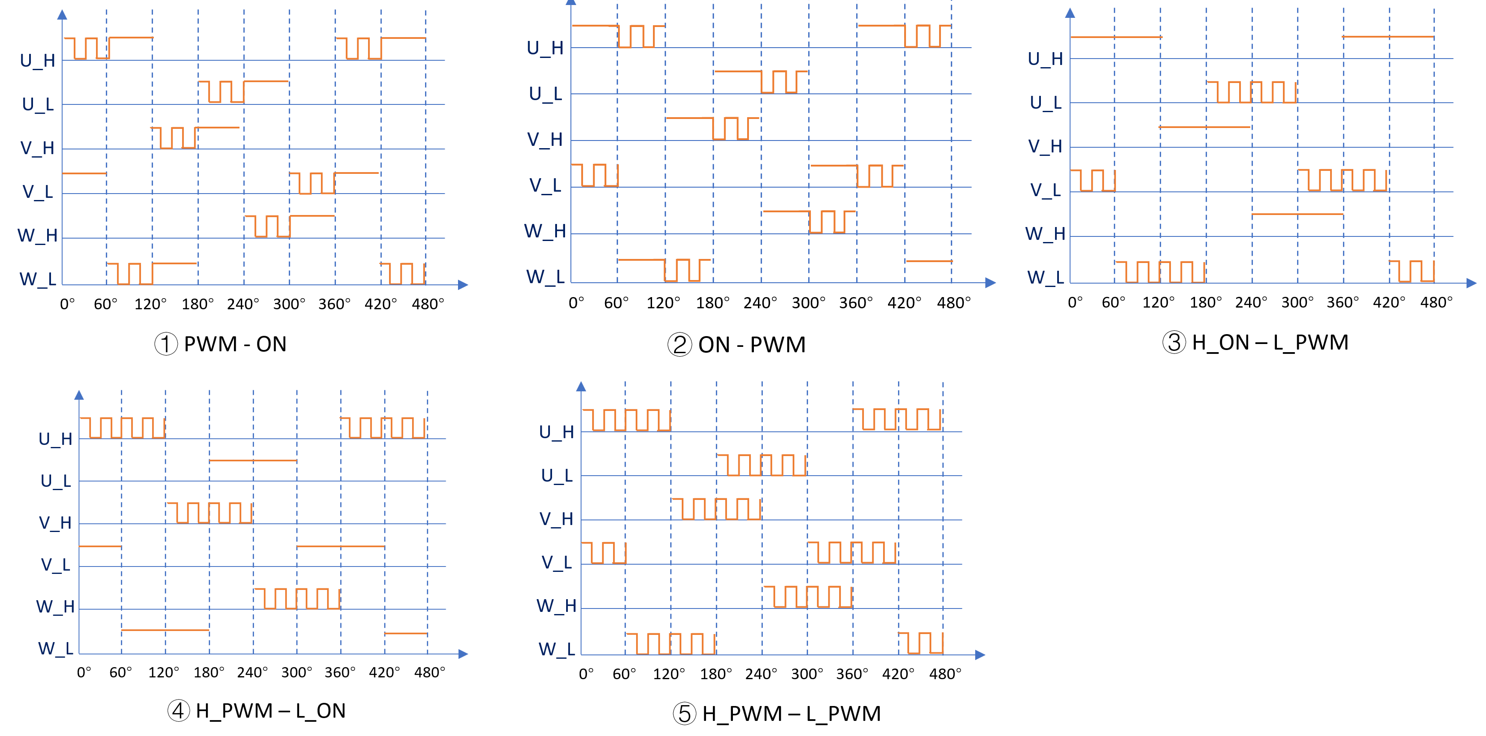
并且我们看出来一个周期有六个状态,所以每个相位对应60度。通常使用 PWM 控制直流无刷电机的常见方法有 5 种,分别是: PWM – ON、ON–PWM、H_ON – L_PWM 、H_PWM – L_ON、H_PWM – L_PWM。且均是电机处于 120°的运行方式下进行的。
霍尔传感器位置确认
从上图中我们可以看到有三个霍尔传感器确认当前电机的位置。霍尔期间输出高低电平。 具体对应电平对应位置如下:
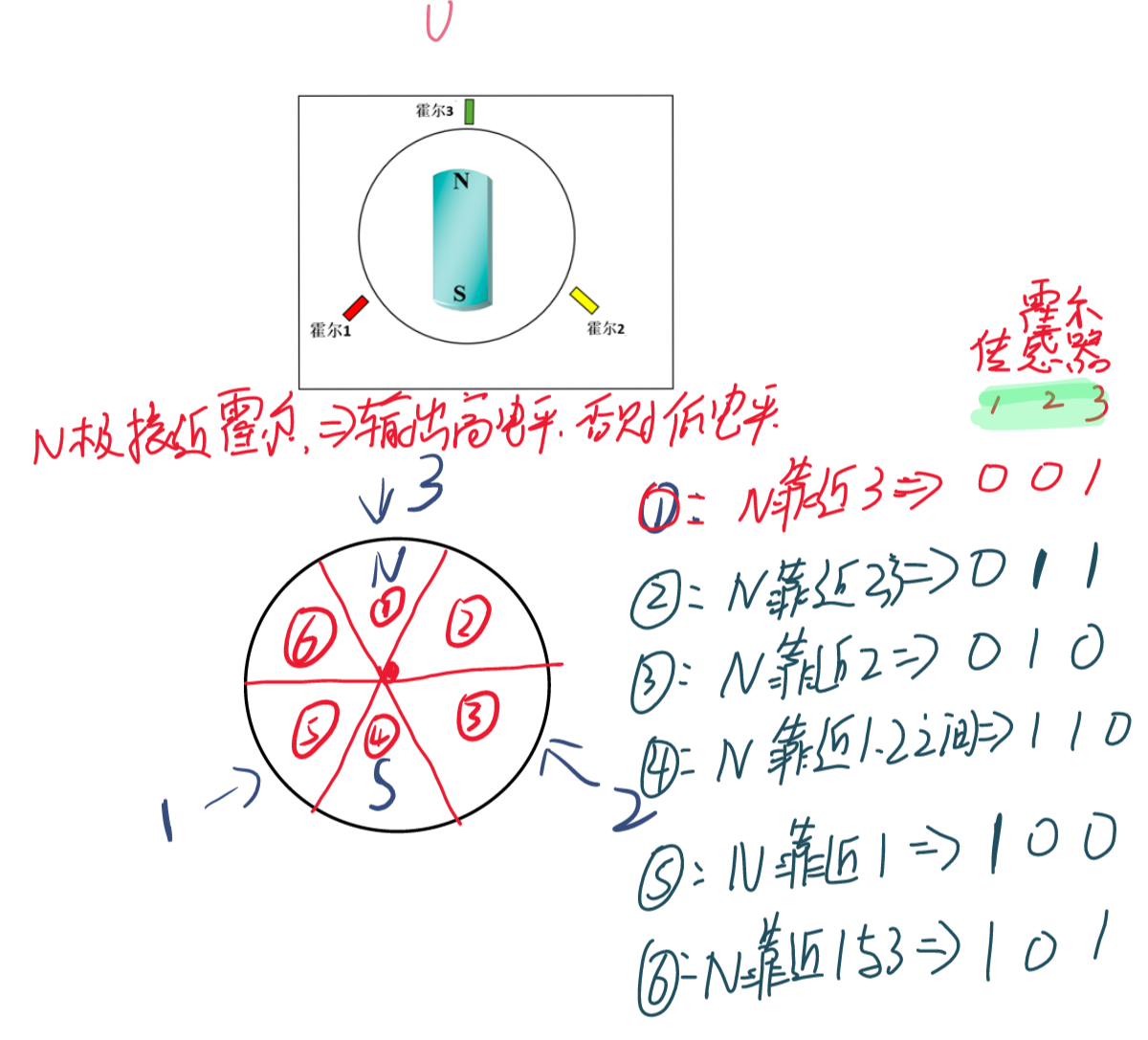
不同厂家生产的电机霍尔传感器位置可能不一样,因此需要厂家会给出真值表,根据真值表去控制UVW的开启和关闭即可。

上述真值表对应的控制电路图如下图所示:
所以读取霍尔传感器的值,给对应的 U V W 相导通即可。
由实际机械角度可以进一步引出电角度这个概念。这里我们需要进一步区分下这两个概念:
- 机械角度:指的是电机转子在空间上旋转的角度,以圆周为360° 来度量。比如,电机转子从初始位置转动了半圈,那机械角度就是180°。
- 电角度:是基于电机磁场变化周期来定义的角度。对于一个具有 ( p ) 对极的电机,当转子旋转一周(机械角度360° )时,电机内部的磁场会经历 ( p ) 个完整的变化周期。我们把磁场变化一个周期所对应的角度定义为360° 电角度。
举例说明:
- 假设有一台2极(也就是1对极, ( p = 1 ) )的电机,当转子旋转的机械角度 ( \theta_m = 90° ) 时,根据上述公式,电角度 ( \theta_e = 1×90° = 90° ) ,此时机械角度和电角度相等。
- 再看一台4极( ( p = 2 ) )的电机,当转子旋转的机械角度 ( \theta_m = 90° ) 时 ,电角度 ( \theta_e = 2×90° = 180° ) ,也就是说在这台电机里,转子机械角度旋转90° ,但磁场变化了半个周期,电角度是180° 。
这个参数在计算速度大有作用。至于如何计算后面再说。
本文来自博客园,作者:Bathwind_W,转载请注明原文链接:https://www.cnblogs.com/bathwind/articles/19047584

 浙公网安备 33010602011771号
浙公网安备 33010602011771号