基于YOLOv8的停车场空车位目标检测项目|完整源码数据集+PyQt5界面+完整训练流程+开箱即用!
基于YOLOv8的停车场空车位目标检测项目|完整源码数据集+PyQt5界面+完整训练流程+开箱即用!
源码包含:完整YOLOv8训练代码+数据集(带标注)+权重文件+直接可允许检测的yolo检测程序+直接部署教程/训练教程
项目摘要
随着城市机动车保有量的持续增长,“找车位难”已成为智慧城市与智慧交通建设中的典型痛点问题。传统依赖人工巡检或地磁传感器的停车管理方式,存在部署成本高、维护复杂、实时性不足等问题,已难以满足现代停车场智能化管理需求。
本项目基于 YOLOv8 目标检测模型,构建了一套 停车场空车位智能检测系统,可对监控画面中的 已停车辆(Occupied) 与 空车位(Vacant) 两类目标进行实时识别与可视化展示。系统支持图片、视频、本地文件夹及实时摄像头等多种输入形式,并集成 PyQt5 图形化界面,实现检测结果的直观展示与交互操作。
项目提供 完整可运行源码、标准化标注数据集、训练权重文件以及详细训练与部署文档,用户无需复杂配置即可快速复现模型效果,实现从模型训练到应用落地的一站式实践,适用于课程设计、毕业设计、科研实验及智慧停车相关工程原型开发。
前言
在智慧交通与智慧城市快速发展的背景下,停车资源的高效利用已成为城市管理中的重要议题。根据实际调研发现,停车场内往往存在“车位并不紧张,但驾驶员难以快速定位空车位”的情况,其根本原因在于缺乏实时、精准、低成本的车位状态感知手段。
近年来,随着深度学习与计算机视觉技术的成熟,基于目标检测的视觉感知方案逐渐成为智能停车领域的重要研究方向。其中,YOLO 系列模型凭借 端到端、速度快、精度高 的优势,在实时场景下表现尤为突出。YOLOv8 作为 Ultralytics 最新一代模型,在网络结构、损失函数与训练策略等方面均进行了优化,为实时车位检测提供了良好的技术基础。
本项目以实际停车场监控场景为应用背景,从数据集构建、模型训练、推理部署到图形化系统集成进行完整实现,力求为读者提供一个工程可复现、逻辑清晰、可扩展性强的停车场空车位检测完整示例。
一、软件核心功能介绍及效果演示
1. 双类别车位状态智能识别
系统基于 YOLOv8 检测模型,对停车场场景中的目标进行精准识别,支持以下两类检测结果:
- 已停车辆(Occupied):表示当前车位已被车辆占用
- 空车位(Vacant):表示当前车位处于可使用状态
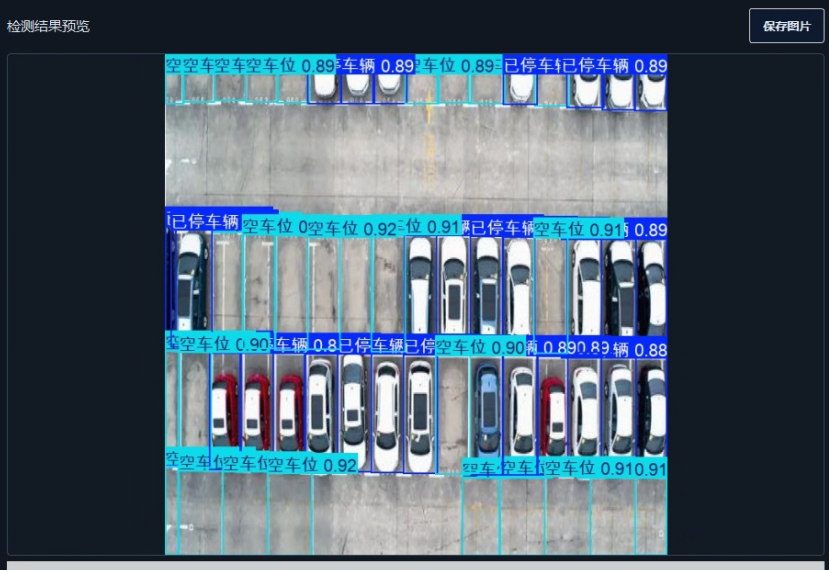
检测结果以目标框形式叠加在原始画面上,并标注类别名称与置信度,实现车位状态的直观可视化。
2. 多输入源检测模式支持
系统支持多种常见输入方式,适配不同使用场景:
- 单张图片检测:适合数据分析与效果验证
- 图片文件夹批量检测:用于数据集快速评估
- 本地视频文件检测:模拟真实监控录像分析
- 实时摄像头检测:满足实时停车场监控需求
用户可通过 PyQt5 图形界面一键切换检测模式,无需修改代码。
3. PyQt5 图形化界面(GUI)
为提升系统易用性,项目基于 PyQt5 构建了完整的桌面端可视化界面,主要功能包括:
- 模型加载与权重切换
- 输入源选择(图片 / 视频 / 摄像头)
- 实时检测画面显示
- 检测结果状态提示与日志输出
即使不具备深度学习背景的用户,也可通过界面完成模型推理与效果演示。
4. 完整训练流程与可复现性保障
项目不仅提供推理程序,同时完整保留了 YOLOv8 的训练流程,包括:
- 标准 YOLO 格式数据集(images / labels 结构清晰)
- 训练配置文件(类别数、类别名称、路径配置)
- 模型训练、验证与测试脚本
- 训练结果分析与权重文件导出
用户可在现有数据集基础上进行二次训练或扩展新场景,具备良好的工程复用价值。
5. 实际检测效果说明
在典型停车场监控画面中,系统能够在复杂光照、不同拍摄角度及多车位密集场景下,稳定识别空车位与已停车辆状态,具备较强的鲁棒性与实时性,满足实际工程应用对准确率与推理速度的基本要求。
二、软件效果演示
为了直观展示本系统基于 YOLOv8 模型的检测能力,我们设计了多种操作场景,涵盖静态图片、批量图片、视频以及实时摄像头流的检测演示。
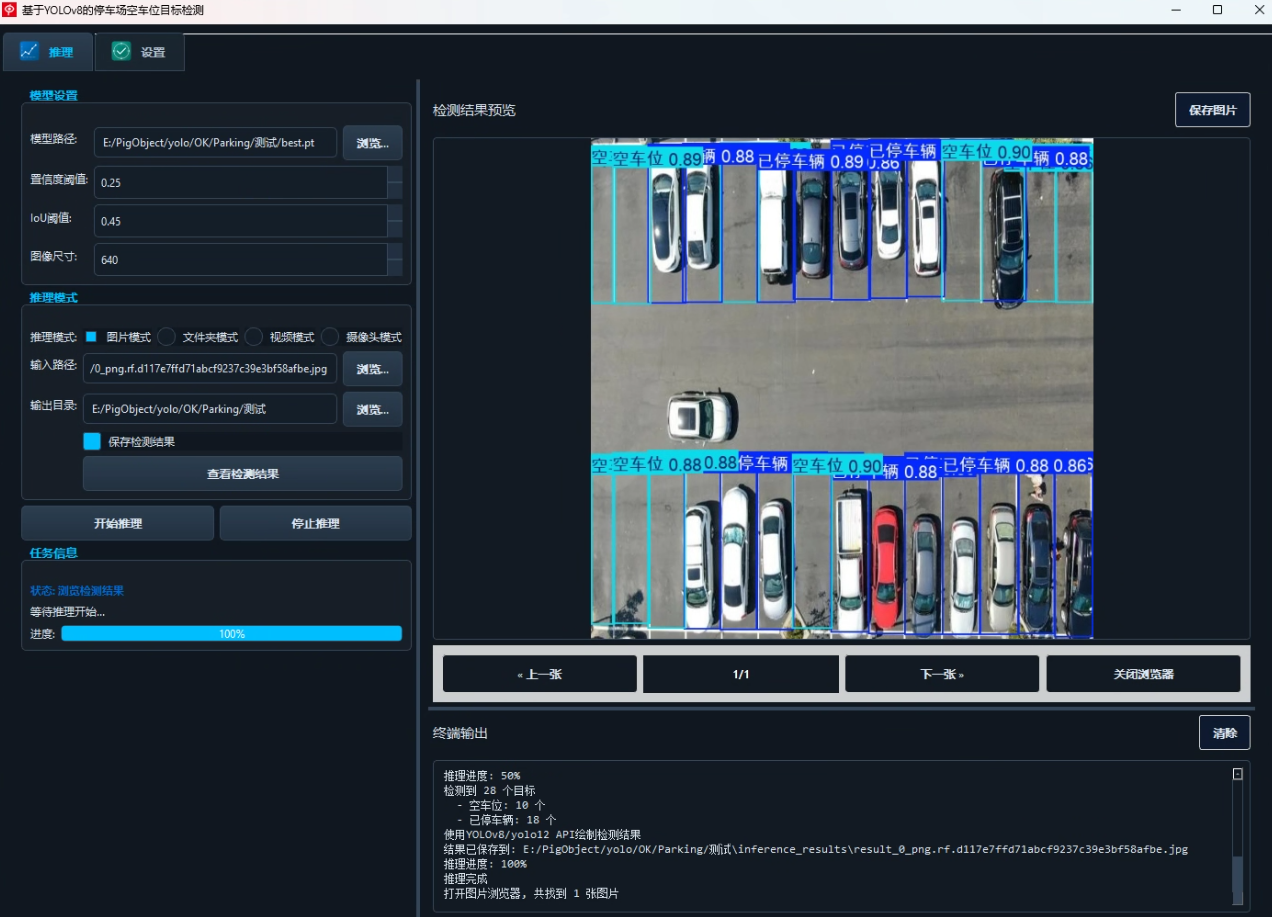
(1)单图片检测演示
用户点击“选择图片”,即可加载本地图像并执行检测:
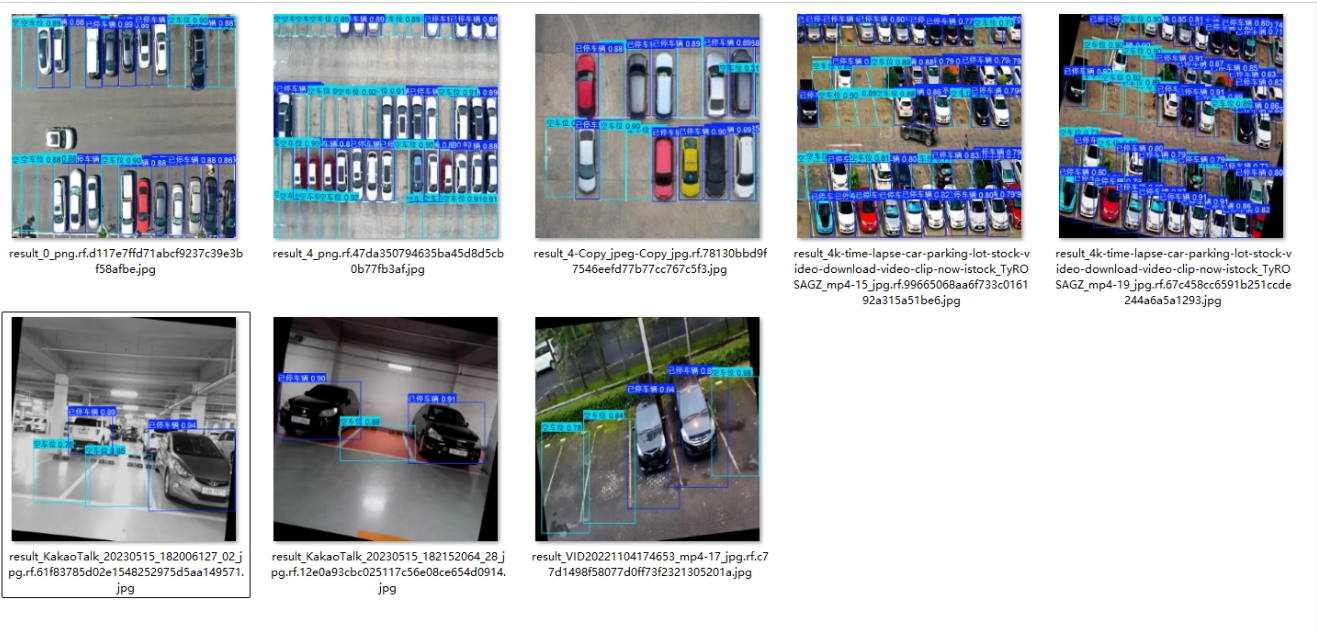
(2)多文件夹图片检测演示
用户可选择包含多张图像的文件夹,系统会批量检测并生成结果图。

(3)视频检测演示
支持上传视频文件,系统会逐帧处理并生成目标检测结果,可选保存输出视频:
(4)摄像头检测演示
实时检测是系统中的核心应用之一,系统可直接调用摄像头进行检测。由于原理和视频检测相同,就不重复演示了。

(5)保存图片与视频检测结果
用户可通过按钮勾选是否保存检测结果,所有检测图像自动加框标注并保存至指定文件夹,支持后续数据分析与复审。
三、模型的训练、评估与推理
YOLOv8是Ultralytics公司发布的新一代目标检测模型,采用更轻量的架构、更先进的损失函数(如CIoU、TaskAlignedAssigner)与Anchor-Free策略,在COCO等数据集上表现优异。
其核心优势如下:
- 高速推理,适合实时检测任务
- 支持Anchor-Free检测
- 支持可扩展的Backbone和Neck结构
- 原生支持ONNX导出与部署
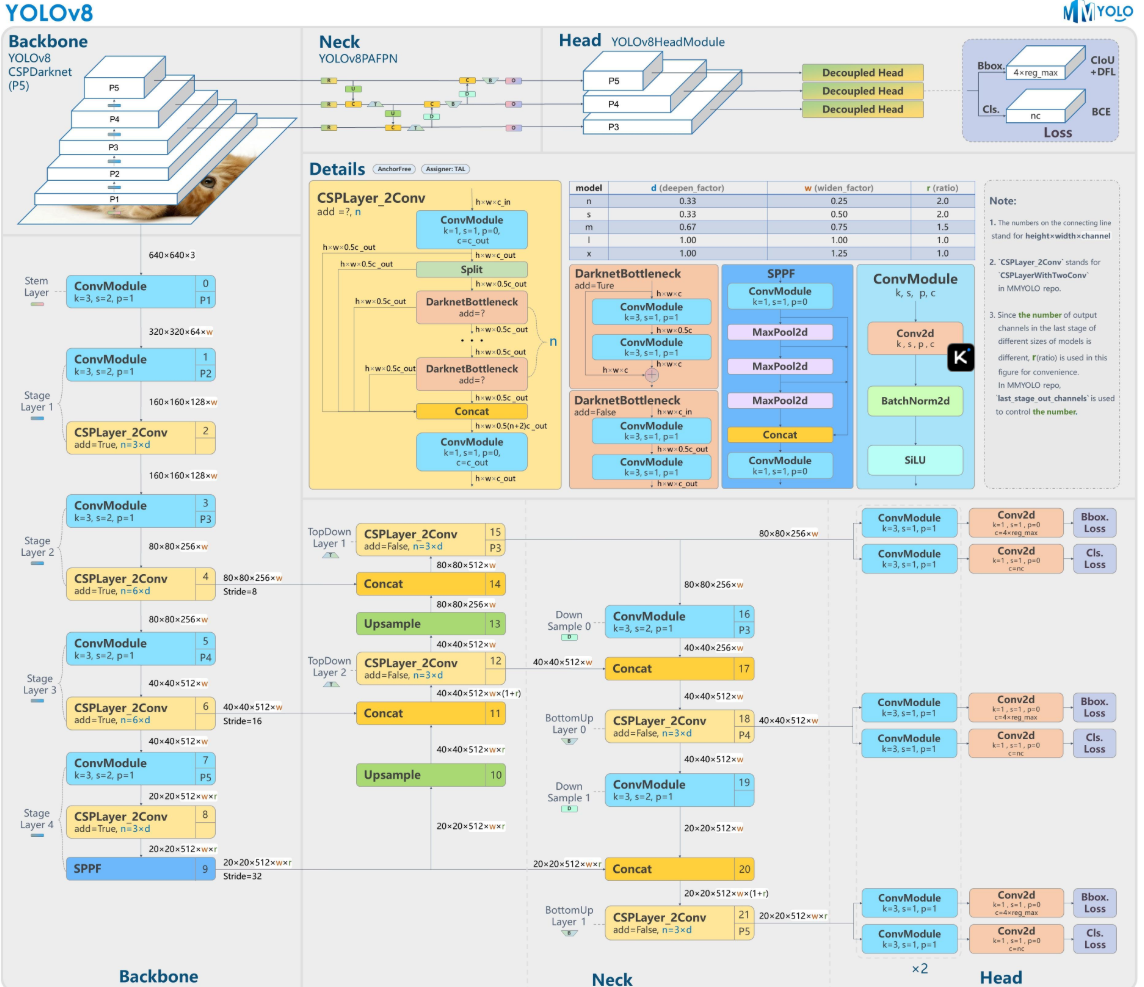
3.1 YOLOv8的基本原理
YOLOv8 是 Ultralytics 发布的新一代实时目标检测模型,具备如下优势:
- 速度快:推理速度提升明显;
- 准确率高:支持 Anchor-Free 架构;
- 支持分类/检测/分割/姿态多任务;
- 本项目使用 YOLOv8 的 Detection 分支,训练时每类表情均标注为独立目标。
YOLOv8 由Ultralytics 于 2023 年 1 月 10 日发布,在准确性和速度方面具有尖端性能。在以往YOLO 版本的基础上,YOLOv8 引入了新的功能和优化,使其成为广泛应用中各种物体检测任务的理想选择。
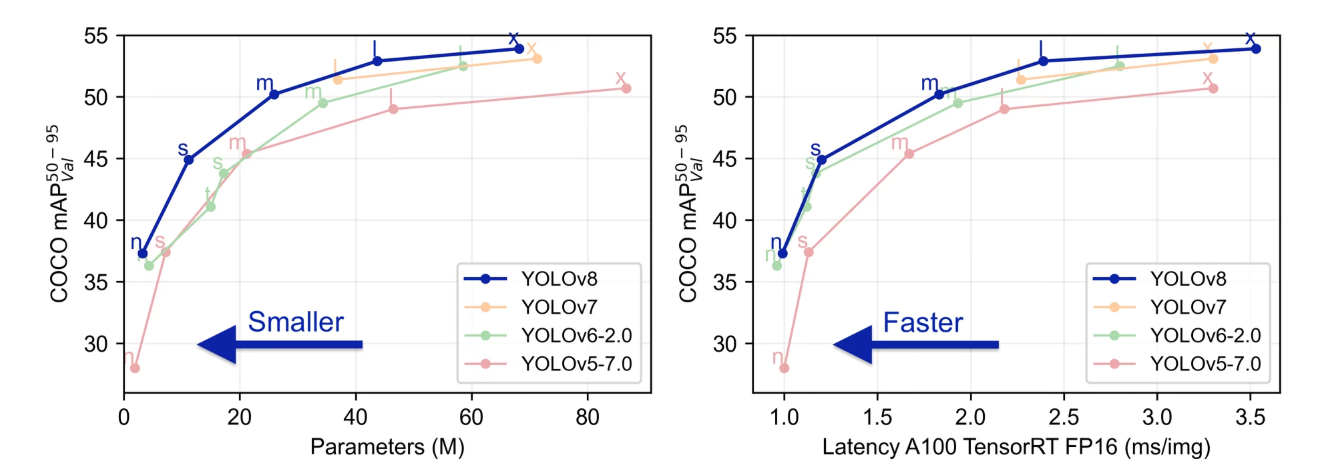
YOLOv8原理图如下:
3.2 数据集准备与训练
采用 YOLO 格式的数据集结构如下:
dataset/
├── images/
│ ├── train/
│ └── val/
├── labels/
│ ├── train/
│ └── val/
每张图像有对应的 .txt 文件,内容格式为:
4 0.5096721233576642 0.352838390077821 0.3947600423357664 0.31825755058365757
分类包括(可自定义):

3.3. 训练结果评估
训练完成后,将在 runs/detect/train 目录生成结果文件,包括:
results.png:损失曲线和 mAP 曲线;weights/best.pt:最佳模型权重;confusion_matrix.png:混淆矩阵分析图。
若 mAP@0.5 达到 90% 以上,即可用于部署。
在深度学习领域,我们通常通过观察损失函数下降的曲线来评估模型的训练状态。YOLOv8训练过程中,主要包含三种损失:定位损失(box_loss)、分类损失(cls_loss)和动态特征损失(dfl_loss)。训练完成后,相关的训练记录和结果文件会保存在runs/目录下,具体内容如下:
3.4检测结果识别
使用 PyTorch 推理接口加载模型:
import cv2
from ultralytics import YOLO
import torch
from torch.serialization import safe_globals
from ultralytics.nn.tasks import DetectionModel
# 加入可信模型结构
safe_globals().add(DetectionModel)
# 加载模型并推理
model = YOLO('runs/detect/train/weights/best.pt')
results = model('test.jpg', save=True, conf=0.25)
# 获取保存后的图像路径
# 默认保存到 runs/detect/predict/ 目录
save_path = results[0].save_dir / results[0].path.name
# 使用 OpenCV 加载并显示图像
img = cv2.imread(str(save_path))
cv2.imshow('Detection Result', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
预测结果包含类别、置信度、边框坐标等信息。

四.YOLOV8+YOLOUI完整源码打包
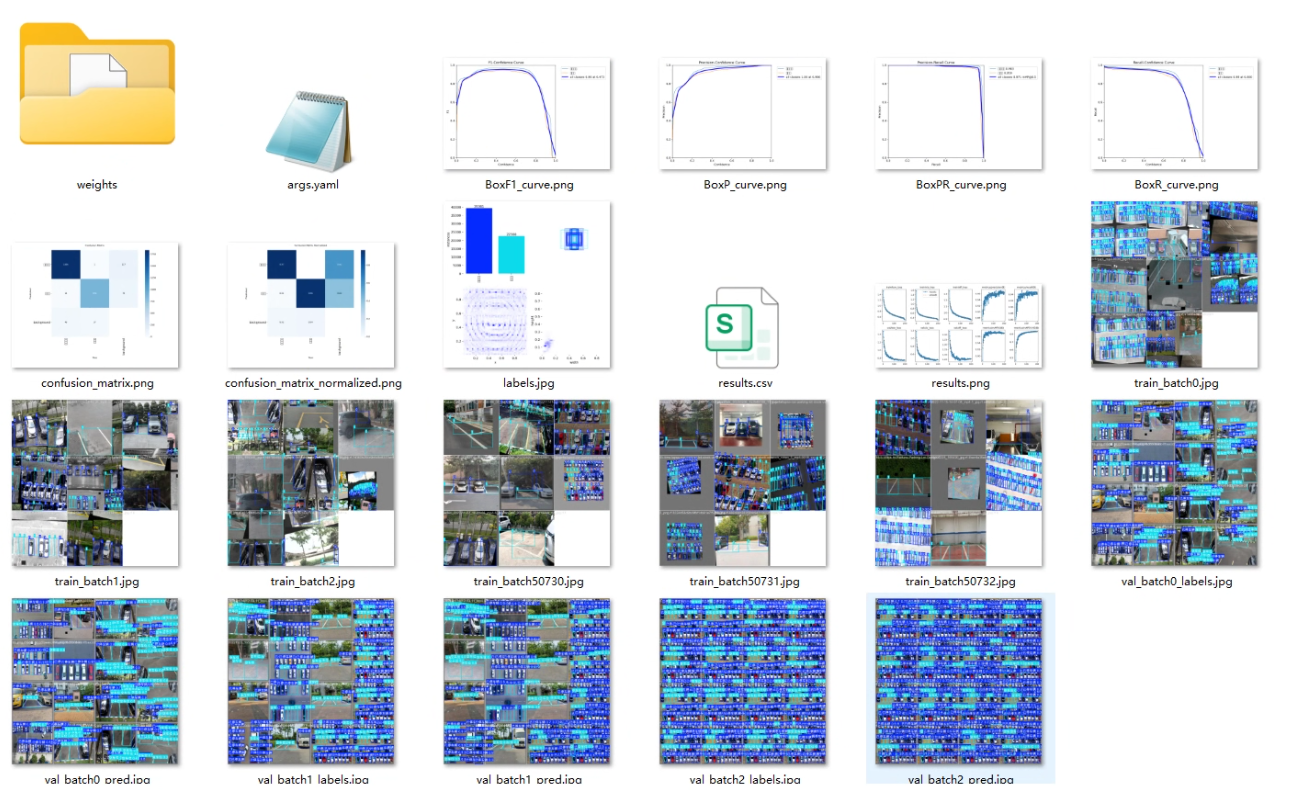
本文涉及到的完整全部程序文件:包括python源码、数据集、训练代码、UI文件、测试图片视频等(见下图),获取方式见【4.2 完整源码下载】:
4.1 项目开箱即用
作者已将整个工程打包。包含已训练完成的权重,读者可不用自行训练直接运行检测。
运行项目只需输入下面命令。
python main.py
读者也可自行配置训练集,或使用打包好的数据集直接训练。
自行训练项目只需输入下面命令。
yolo detect train data=datasets/expression/loopy.yaml model=yolov8n.yaml pretrained=yolov8n.pt epochs=100 batch=16 lr0=0.001
4.2 完整源码
至项目实录视频下方获取:https://www.bilibili.com/video/BV1kFrjBQEJv

包含:
📦完整项目源码
📦 预训练模型权重
🗂️ 数据集地址(含标注脚本)
总结
本文围绕 基于 YOLOv8 的停车场空车位目标检测系统,从应用背景、技术选型到系统实现进行了完整介绍。项目以停车场实际监控场景为出发点,采用 YOLOv8 作为核心检测模型,实现了对 已停车辆 与 空车位 两类目标的高效识别,并通过 PyQt5 图形化界面完成了模型推理结果的可视化与交互操作。
从工程实现角度来看,项目不仅具备良好的检测精度与实时性能,同时在系统结构设计上强调可复现性与可扩展性,完整提供了数据集、训练脚本、权重文件及部署流程说明,降低了目标检测项目从算法验证到实际落地的门槛。无论是作为深度学习入门实践、课程设计与毕业设计选题,还是智慧停车与智能交通相关应用的原型系统,该项目都具有较高的参考价值。
后续可在此基础上进一步拓展车位编号绑定、空位统计分析、多摄像头协同感知及与停车管理系统的数据对接等功能,为智慧停车场景提供更加完善和工程化的解决方案。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号