

【V知】汽车电子-从零开始的知识拼图-2
汽车为什么需要功能安全和网络安全
- safety and cybersecurity
- 保证车内和车外人员的安全
- 每年有数百万的人死于/受伤,因为道路交通
- 车辆E/E系统的不良行为是原因之一
- 车辆E/E系统的安全提升:
- 正常运行和误用时:通过SOTIF提高系统的安全性
- SOTIF:safety of the intended functionality
- 故障发生时:通过功能安全提高系统的安全性
- E/E系统变得不安全:
- 可能通过网络攻击泄露机密:黑客攻击、窃取信息等
- 在设计时考虑网络安全,可以缓解和管理这类问题
- 正常运行和误用时:通过SOTIF提高系统的安全性
- ISO发布了很多 功能安全和网络安全 相关规定
为什么需要“可追溯性” traceability
- 工程:
- 充分理解问题,并制定合适的解决方案,以解决问题
- 开发解决方案的过程:以数学和科学为基础
- 工程的成果:技术、机器(汽车和计算系统)、结构、过程
- 探索和理解 problem:
- 拆解问题:大问题拆成小问题,重复多次拆解
- 子问题:关注what/where/who/when, not HOW
- 理解子问题之间、父问题与子问题的关系:可追溯性的一个方面
- 解决:HOW
- 每个子问题的答案是整体解决方案的一部分
- what和how之间、以及how彼此之间的联系:可追溯性的另一个部分
- 可追溯性:解决复杂问题时的重要部分
- 对于解决问题的方案探索:
- 可追溯性:使能判断是否已经完全解决了问题
- 如对问题的理解发生变化,可追溯性帮助完善解决方案
- 对于变更:
- 发生变更的原因:包括变更原因、发起者、执行者
- 可追溯性在问题解决
- 不仅拥有从问题到解决方案的路径
- 还可以对解决方案的每个部分问为什么
- 对于解决问题的方案探索:
- 具体的解决问题和可追溯性:
- 正确分解子问题:
- 测试每个单独的解决方案,以确保子问题被完全解决
- 可追溯性的一部分:将测试结果与相应的子问题联系起来 (虚线部分)
- 对于车载系统:从问题到解决方案是分层的
- 车载系统由子系统组成
- 子系统由组件组成:ECU/线束/保险丝盒等
- 这些组件由更多的组件组成
- 每层中:之前的解决方案成为需要解决的新问题
- 可追溯性:
- 需要在问题和解决方案的多层之间有可追溯性
- 最终判断最低层的解决方案是否满足最高层的问题
- 问题最终变成一个基础科学问题:如物理或化学
![]()
- 正确分解子问题:
- vector家族产品
- PREEvision:
- 开发车辆E/E系统的数字工程平台
- 可以在整个项目中建立完全的可追溯性
- vTESTstudio and CANoe:
- 通过测试实施和测试结果跟踪测试需求
- CANoe.DiVa:
- 针对ECU的诊断部分生成测试用例
- 确保ECU诊断的正确实现,并为此提供证据
- VectorCAST:
- 面向软件系统和单元测试
- 其结果可以链接到软件的原始目标
- Squore:
- 将项目流程可视化,从而提供可追溯性
- vCDM and vCDMStudio/CANape:
- 在标定变更中建立可追溯性
- PREEvision:
网页接口 web-interface
- 本期:介绍可以提供网页接口的技术
- 互联网:
- 客户端client 和服务器server:
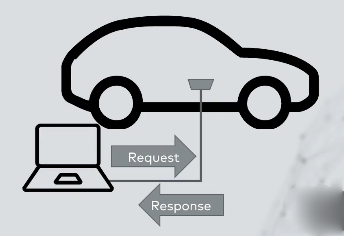
- 发送请求,数据返回,这就是互联网
![]()
- 发送请求,数据返回,这就是互联网
- 后台:客户端使用HTTP从服务器请求数据
- HTTP:超文本传输协议 Hypertext Transfer Protocol
- 请求和响应的数据几乎都是基于文本的
- 为防止被窥探,通常使用TLS,即HTTPS (HTTP-secure)
- TLS:传输层安全技术 Transport Layer Security
- 客户端client 和服务器server:
- JSON: JavaScript Object Notation
- text-based, human-readable
- 允许在软件中使用基于文本的对象描述传输
- 面向对象的数据传输,即紧凑又易于处理
- REST-API (REpresentational State Transfer)
- REST:表示请求中所包含服务所需的所有信息
- 服务器不需要记住过去的任何事,所需信息都在请求中
- 可以同时为来自许多客户端的许多请求提供服务
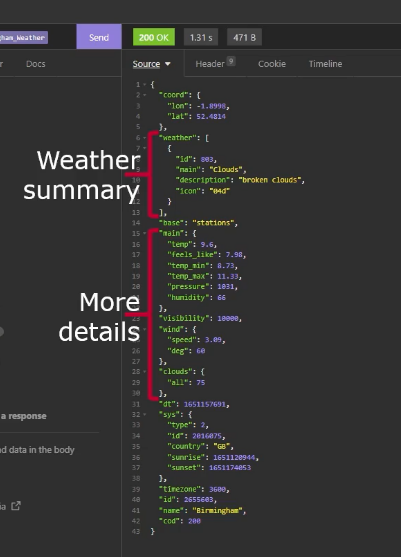
- 查询天气时,JSON返回格式
- 返回的数据可以供其他程序或软件使用
![]()
- 返回的数据可以供其他程序或软件使用
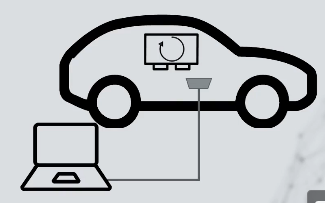
- 与车辆相关的网页接口
诊断数据-诊断开发流程
- 诊断协议是实现流程自动化的一种方法
- 诊断协议:OBD/UDS
- 自动化什么:一系列流程
- 系统组成:汽车、测试工程师、测试仪
![]()
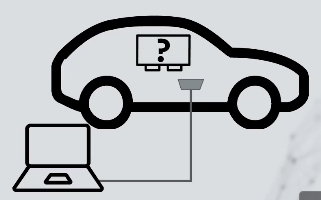
- 诊断可以从3个视角描述
- 运行视角:operative perspective
- 考虑系统需要实现的所有目标
- 涵盖了系统在车辆整个生命周期内的一切事情
- 从进行调试的开发阶段,到实现正确装配的生产阶段
- 使用和维护过程中,要确保检测到故障并进行维修和更新
- 此外,需要处理或删除敏感数据(用户ID/密码等)、危险装置(气囊里的小型爆炸物)
- 运行视角的一个重要部分:
- 确定具体任务涉及的 参与者和做了什么
- 例如:测试仪可与ECU交互,而工程师的可机动移动性
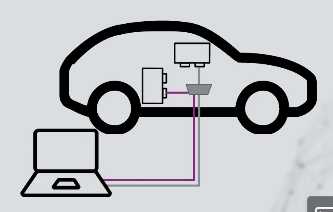
- 外部视角:(人类视角)
- 期望测试仪和车内ECU共同完成任务
- ODX:连接诊断仪和车内ECU的诊断接口
- 标准化数据格式ODX:Open Diagnostic data-eXchange
- 用于描述测试仪与车辆之间的通信
- 允许测试仪自动加载一个或多个ECU数据
- 具体到某个项目,可通过ODX加载并传输大量数据
- 导致ODX文件庞大且复杂,不易被理解 -- 谨慎使用ODX
- 当把诊断仪连接到车辆,做诊断操作时 -- ODX非常有用
![]()
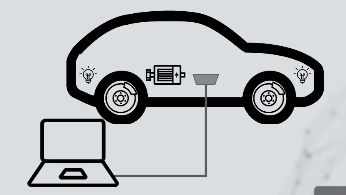
- 内部视角:(ECU视角)
- ECU内部是如何进行诊断的
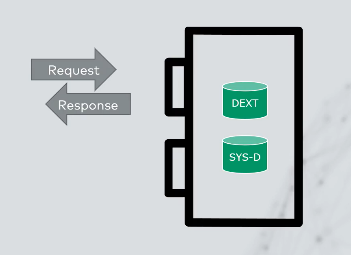
- AUTOSAR规定了内部视角的标准化:DEXT
- DEXT:AUTOSAR Diagnostic Extract
- DEXT可以描述诊断请求/响应中的信息与ECU软件的相互关联
- ECU软件描述是AUTOSAR系统描述的一部分:
- AUTOSAR系统描述是一个单独的文件 SYS-D
- AUTOSAR系统描述还包括ECU/车辆的网络通信
- 通常,在DEXT中引用SYS-D,而非复制
- DEXT引用机制
- 引用AUTOSAR系统描述中的软件/网络信息
- DEXT并不包含单个ECU所需的全部信息:
- DEXT是一种补充格式,不是完整的独立格式
![]()
- DEXT是一种补充格式,不是完整的独立格式
- 标准化数据格式实现流程自动化:
- 外部工具测试仪:可以使用ODX自动加载数据
- ECU配置工具:可以从DEXT中自动加载信息,从而配置ECU软件
- 标准化数据格式的设计目的各不相同:
- 但其实是从不同角度处理同一个问题
- 这些不同的标准版数据格式无法相互替代
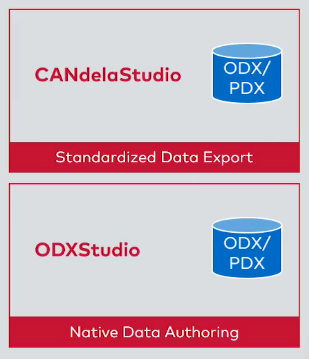
- vector的CANdelaStudio
- 采用用户友好的方式,创建/提供诊断的外部和内部视角
- 提供标准化的数据导出
- 从单一信息源生成ODX和DEXT,从而保证数据同步
![]()
- 从单一信息源生成ODX和DEXT,从而保证数据同步
ODX
- ODX:Open Diagnostic data-eXchange
- ODX: ISO 22901-1
- Exchange:是指诊断仪的参数化
- 包括诊断仪如何向技术人员展示信息
- ODS定义了多个类:category
- 每个ODS类与诊断仪需要的一类数据相关联
- 注意:不是必须使用标准定义的所有类
- 1个ODX文件:只能包含一个类
- 每个ODS类与诊断仪需要的一类数据相关联
- ODX常用的类:
- 按照使用的普遍程度排序的ODX类:
- ODX-D, ODX-C(子集CS), ODX-V, ODX-F, ODX-E, ODX-FD
- ODX-D:诊断相关
- 对应诊断数据:如诊断仪或ECU发送的请求/响应
- ODX-D:将请求/响应按照数据流逐个字节进行描述
- ODX的结构:会对诊断仪展示的内容有影响
![]()
- ODX-C/CS:通信相关
- communication parameters
- 诊断协议中需要指定的一些值,如定时器或超时
![]()
- ODX-V:车辆信息相关
- vehicle information
- 两个ECU时:测试仪可通过两个不同的总线技术进行访问
- 测试仪需要知道使用哪个总线(接口)与哪个ECU通信
![]()
- 测试仪需要知道使用哪个总线(接口)与哪个ECU通信
- ODX-F:刷写相关
- software updated (flash) information
- 更新ECU软件,保存相关刷写信息(如兼容部件号)
- 注:刷写脚本并不属于ODX-F,必须单独定义
- ODX-F只需要告诉诊断仪插入到这些请求中的数据
![]()
- ODX-F只需要告诉诊断仪插入到这些请求中的数据
- ODX-E:ECU配置数据
- ECU configuration data
- 诊断仪向ECU写入预定义的配置信息,如英里or公里,左驾or右驾
![]()
- ODX-FD:
- function-oriented diagnostics
- 不同ECU有不同的诊断:
- ODX-FD将诊断功能与不同ECU的不同功能关联在一起
![]()
- ODX-FD将诊断功能与不同ECU的不同功能关联在一起
- 按照使用的普遍程度排序的ODX类:
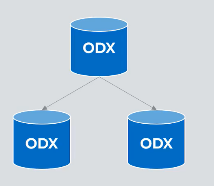
- ODX对信息进行统一定义的机制
- 可以在ODX文件之间和内部进行链接、继承、引用
![]()
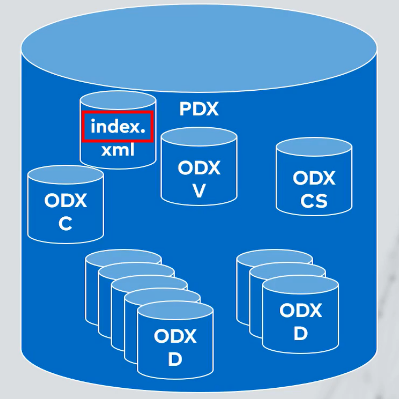
- PDX:
- 1个ODX文件只能包含一个类
- 但在分发ODX时,希望一个文件包含所有信息
- packaged ODX, 能够包含不同的类的容器
- 包括:ODX文件和索引index
![]()
- 1个ODX文件只能包含一个类
- AGL:authoring guidelines
- 必要性:
- PDX的规模扩大,数据量巨大;ODX功能强大的同时使数据复杂
- 当需要同流程伙伴合作,或者企业或部门之间数据交换时
- AGL有助于限制标准的复杂性,提高可用性
- 测试人员不必理解全部标准
- 只需选择需要支持标准的哪些部分
- checker检查器
- 配合AGL,以确保工作成果符合AGL
- 必要性:
- vector工具
- CANdelaStudio:
- 诊断数据库(遵循诊断规范的)编写工具
- 可以导出与诊断规范相对应的ODX
- ODXStudio:
- 成为格式和协议专家,并使用ODX的原生形式
- 直接在ODX数据模型中处理ODX数据
![]()
- CANdelaStudio:
网络协议
- 网络协议的不同寻址方式 (addressing)
- 协议:
- 请求或传输信息的一种形式化方式。
- 单播 unicast
- one to one,只与一个人对话
- 组播 multicast
- one to many,和一组人,但不是全部人对话
- 广播 boardcast
- one to all, 与所有人对话
- 协议:
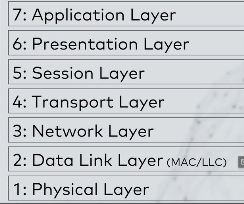
- OSI/OC模型
- 开放系统互连模型 open systems interconnect
- 不同层有不同的目的
- 5 6 7层 可合为一层
![]()
- 5 6 7层 可合为一层
- 应用层:application layer
- 软件/应用程序直接与之交互,提取数据等
- 应用层不是应用程序本身的位置,而是应用程序使用的协议
- eg. HTTP协议
- 表示层:presentation layer
- 与如何编码信息有关
- eg.在数据传输中加密/压缩数据,用到表示层的功能
- 会话层:session layer
- 会话层用于启动/停止连接
- 会话层的协议:涉及启动和结束通信会话
- eg.下载中断后重新启动下载,用到会话层的功能
- 传输层:transport layer
- 传输层的内容与传输数据相关
- 传输层:将数据切成小块,以便通过单个数据帧发送
- 发送端的传输层:
- 在信息中添加一个序列号,如1,2,3
- 接收端的传输层:
- 根据序列号将小块数据重新组合成原来的大的数据
- 网络层:network layer
- 网络层负责信息的逻辑寻址
- 确保信息穿过网络,到达接收端
- eg.IP 地址
- 网络层负责信息的逻辑寻址
- 数据链路层:data link layer
- 数字信息的最后一层
- 数据链路层:从网络层获取数据,转换后交给物理层
- eg.MAC/LLC
- 物理层:physical layer
- 网络上传输的实际上是电流或电压脉冲
- 物理层:电线、射频链路、光纤
- 将信息从一个地方传输到另一个地方
- 高层协议利用低层协议发送和接收数据
- 逻辑上讲:发送协议和接收协议的数据传输是在对应层进行的
- 汽车行业的网络模型
- 基本的联网(通信)能力来自第一层和第二层
- CAN/LIN/FlexRay总线标准对第一、二层进行定义
- 其他层自行决定是否使用:
- 如:是否在ECU软件中实现/使用传输层或表示层
- 每层可以更细分为子层
- 数据链路层:MAC and LLC
- 子层 MAC: media access control
- 子层 LLC: link layer control
- 数据链路层:MAC and LLC
- 基本的联网(通信)能力来自第一层和第二层
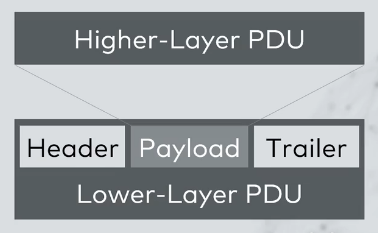
- 报文:协议数据单元 PDU
- 报头 Header: 相当于寄信时的address
- 可在特定网络协议层的报头中插入信息:如地址或数据长度
- 报头是必选项(报头的一部分是可选的)
- 有效荷载 Payload: 相当于信件的内容
- 有效荷载是必选项
- 报尾 Trailer:
- 报尾是可选项:取决于报文属于哪一层或协议类型
- 报尾的作用:让接收端判断是否正确接收到数据
- 数据链路层的主要工作之一:
- 确保在网络通信中,从物理信号到数字信号的转换不会被干扰
- 确保不会因干扰导致位错误,或因不良连接导致位丢失
- 这就是符号(symbol) 或网络符号的作用
- 协议数据单元 PDU:
- 报头、有效荷载、报尾合称为PDU
- PDU用于将(各层的)数据打包,以便发送数据
- PDU在OSI模型中的传递:套娃式
- 高层协议利用低层协议发送和接收数据
- 某一层创建一个PDU,将其向下传递到下一层;或从下层接收一个PDU
- 套娃:每一层增加报头和报尾
- 上一层的PDU作为下一层PDU的有效荷载
- 并根据需要添加报头、报尾,然后发送给下一层
- 直到进入数据链路层,并转换为物理信号,通过物理层发送到网络上
- 高层协议利用低层协议发送和接收数据
- PDU在数据链路层:通常称为帧Frame
- 如:以太网帧
- 图示:
![]()
- 报头 Header: 相当于寄信时的address
OBD
- OBD:
- 车载诊断系统,on board diagnostics
- 最初用于 排放控制系统 的诊断
- 不同国家有不同的OBD:EOBD(欧洲)/JOBD(日本)等
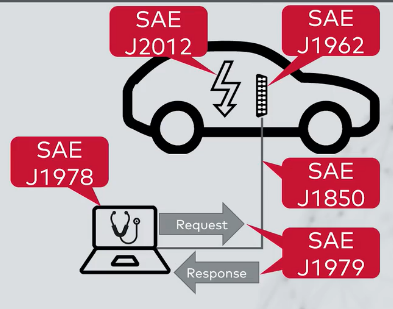
- OBD2:
- OBD2是SAE的一系列标准
- SAE:society of automoive engineers
- OBD2的标准涵盖的内容:
- 关键词:标准化
- SAE J1978:定义诊断测试仪的功能
- 诊断测试仪发送OBD请求,并解释响应。
- SAE J1962:定义诊断工具与车辆之间的接口(连接器)
- SAE J1979:定义车辆的请求和响应
- SAE J1850:定义连接器和诊断测试仪之间的连接
- 一种特殊的网络连接方式
- SAE J2012:定义与车载诊断相关的所有故障
![图片]()
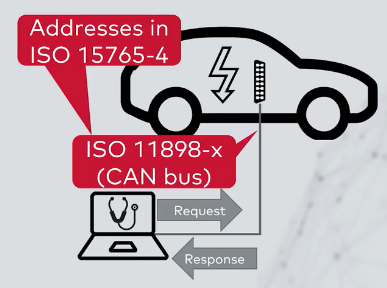
- 如今OBD2在车辆中的使用情况:
- ISO 11898/CAN:定义诊断仪和车辆之间的连接
- ISO 15765-4:定义在OBD中使用的地址
- 如今的OBD大多基于CAN总线
![图片]()
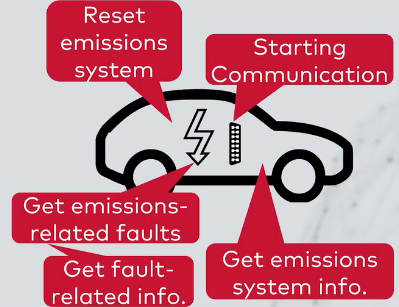
- SAE J1979:所包含的请求和响应?
- 能够与车内ECU启动通信
- 获得有关排放系统的信息(OBD关注排放控制)
- 从车辆获取与排放相关的故障、以及故障信息
- 能够重置排放系统
- 可能对排放系统进行更改、修复故障等
- 其他:
- 通过控制排放系统内的设备来测试排放系统
![图片]()
- 通过控制排放系统内的设备来测试排放系统
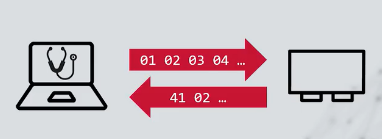
- SAE J1979:如何定义请求和响应?
- 请求和响应都是协议数据单元 PDU
- OBD2定义了OSI模型中的6层和7层 -- J1979是高层协议
- 所有发送和接收的数据都有根据标准进行编码
![图片]()
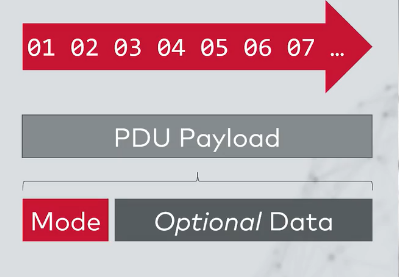
- 典型的请求结构示例
- 通信基于模式、标识符和可选的相关数据
- J1979将PDU分成两部分:模式 and 和模式相关的可选数据
- 如有与请求相关的数据:模式告诉接收端如何解释数据,即数据的含义
- 许多J1979模式使用ID(标识符):
- 不同的ID:PID/TID/MID
![图片]()
- 不同的ID:PID/TID/MID
UDS
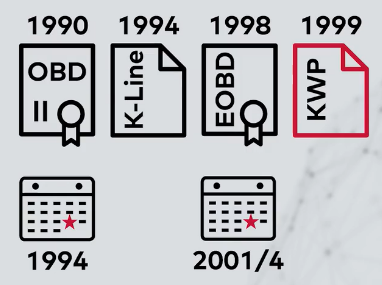
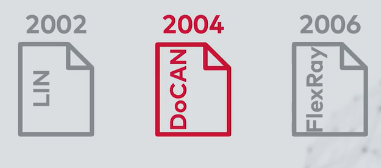
- OBD 发展史:
- 从统一标准 到 多种KWP。。
- 2004 DoCAN发布:基于UDS的DoCAN实现了标准化
![图片]()
![图片]()
- DoCAN:ISO 15765-x
- diagnostics communication over CAN
- 标准有多个部分,主要是通过CAN总线进行诊断通信
- 1 一般信息:标准结构、相关标准、词汇等
- 2 网络层服务(传输协议):收发大于单个CAN帧的数据
- 3 在CAN总线上实施UDS: unified
- 4 对排放系统的要求
- UDS:
- 统一诊断服务 UDS, ISO 14229-1
- unified diagnostics services
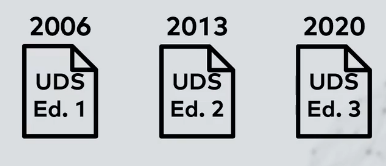
- 不同版本的UDS:
- 需要明确是哪个版本的标准,不同版本之间有重要区别
![图片]()
- 需要明确是哪个版本的标准,不同版本之间有重要区别
- 统一诊断服务 UDS, ISO 14229-1
- UDS3包含的内容:
- 控制/管理 诊断和诊断通信的能力
- 安全加密:验证是否允许与ECU交互;
- 让ECU进入扩展会话:解锁额外功能
- 让ECU进入编程会话:从而进行编程
- 从ECU内容读写数据:
- 不是重新编程,是读取或调整数据
- 读取故障存储的能力:
- 故障存储:fault memory
- 如果ECU检测到故障,会将故障内容记录到内存中并存储
- 控制ECU输入、输出的能力:
- 直接与ECU硬件(电子设备)交互的方式
- 通过UDS激活ECU内的用于诊断的特殊软件
- 一些软件相关的事情
- 例如允许特殊的测试例程或初始化例程
- 软件更新的能力
- UDS涵盖向ECU上传和下载信息 (软件或文件) 的功能
- 图示:
![图片]()
- 控制/管理 诊断和诊断通信的能力
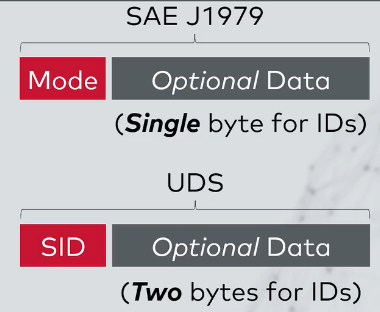
- UDS和OBD2的区别
- 组成:
- OBD2: mode头 + 可选data
- UDS: SID头 + 可选data
- SID: services ID
- 种类差别:
- OBD2: mode有10种模式
- UDS: SID约27种不同的服务
- 服务的子功能:
- UDS: 为某些服务提供子功能
- 例如故障存储功能的多个子功能
- ID大小:
- OBD2: ID为单字节,每个ID有255个值 (FF)
- UDS: ID为2字节,每个ID有65535个值 (FFFF)
- 请求响应权限:非常不同
- OBD2: 购买标准后可以向任何支持OBD的车辆发送请求,并获得响应
- UDS: 不行,除非拥有描述特定ECU和特定车辆的ID的特定数据
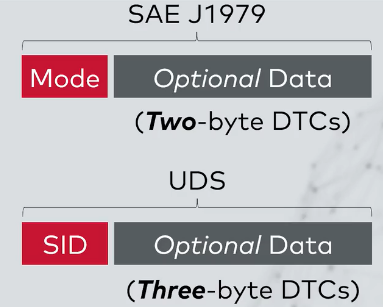
- DTC大小:
- OBD2: J1979只与排放系统有关,因此用 2 bytes 表示DTC
- UDS: 为DTC增加一个字节,3 bytes 表示DTC,数据量更大
- 通常,整车厂可以自行定义每个UDS DTC的内容
- 基于UDS,整车厂有更大的自由度
![图片]()
![图片]()
- 组成:

OBD和UDS之后是什么
- OBD和UDS的简单对比:
- OBD2 比 UDS 早了大约15年:1991 vs 2004 or 2006
- 交互:10mode vs 27服务 and 子服务
- 标识符/ID:1字节(255) vs 2字节65535
- DTC:2字节(65535) vs 3字节(2^24-1)
- 灵活性:OBD2非常受限 vs UDS非常灵活
- 现代汽车的特点:(对比1991)
- ECU的处理能力更强,更多软件,更多ECU
- 对比老式汽车:一个发动机管理系统+制动系统
- 数据种类更多 (软件更多自然导致)
- 排放相关部件更多
- 发动机更复杂,发动机附属部件更多
- 空调从选配到现在的标配,空调会增加发动机负荷,从而影响排放
- 旧的OBD协议耗尽了可用的数字空间
- 但是仍需要OBD用于排放相关诊断
- ECU的处理能力更强,更多软件,更多ECU
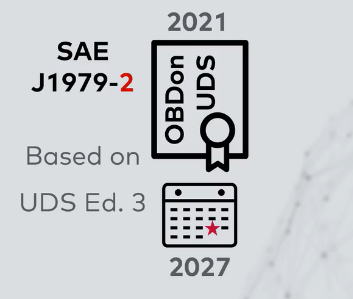
- 新的OBD发布:
- SAE J1979-2在2021年发布
- 在UDS第3版基础上,引入了OBDonUDS的概念
- OBDonUDS:可通过单一方法访问所有诊断数据
- OBDonUDS提供了从UDS访问排放数据的方法
![图片]()
- 诊断的趋同形式:
- 通过UDS检索OBD数据
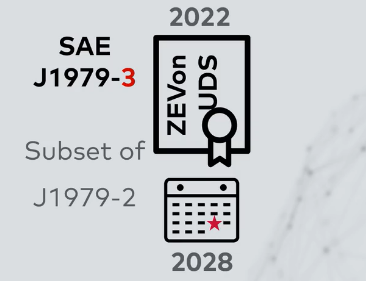
- 新的J1979-3发布:
- 2022年发布,SAE J1979-3描述J1979-2的一个子集
- ZEVonUDS
- 解决电动车/插电式汽车的电能消耗掉的能源的排放问题
- 获取插电式车辆数据、电池监测数据;
- 从电网为汽车充电时可能造成的电网排放数据。。。
![图片]()
软件定义汽车SDV
- 看起来像SDV但实际不是软件定义汽车的:
- 软件可选配 - 不是
- 修复开发中的bug - 不是
- 应用软件更新,或OTA - 不是
- 更新单个ECU以解决问题 - 不是
- 只是获得可用的新数据,如地图数据更新 - 不是
- 手机镜像技术实现数据连续性 - 不是
- SDV中可能包含上述技术,但远不止这些
- 什么是软件定义汽车
- 通过不断增强软件和功能,从而不断扩展/增强车辆的性能
- 不仅是短期内,而是长期的
- 随着时间推移,车辆从硬件中挖掘更多潜力,加载更多功能
- 例如:靠近解锁一些功能、万圣节灯光+恐怖音乐等
- 可能会影响车内的多个ECU
![图片]()
- 车主与SDV:
- 不需要付费才能解锁部分功能
- 在不使用特殊工具的情况下自行应用它们
- 在移动设备点击,或点击车内娱乐系统,新功能就会出现
- 在购买许多年后,车辆将不断获得新性能,车越开越好
- 软件定义汽车使车主保有汽车的时间更长
- 车厂:卖车的车
- 仍然持续改进,持续为客户提供更好的服务
- 持续为客户提供新功能
SOVD
- 面向服务
- service-oriented
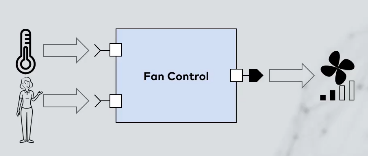
- 传统汽车的软件:
- 以硬件为中心
- eg.风扇控制
- 监控2个输入:温度传感器;用户设置的温度值
- 根据两个输入值的差值,控制风扇转速
- 2个输入值的输入:都是通过硬件(传感器/触摸屏)
- 输出:风扇和电机,也是硬件
![图片]()
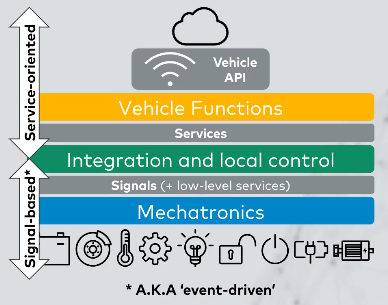
- SDV中的软件:
- mechatronics软件层:与硬件交互的层
- 希望尽量简单,几乎不需要改动本层的软件部分
- 本层的微控制器和操作系统都不需要频繁更新软件
- 集成和本地控制功能层
- 车辆功能层:
- 需要频繁变更软件,通过下面的层控制车辆
- 添加功能,希望快速更新软件和重启功能
- 与云端IT系统进行交互的外部接口
- 真正与硬件交互的只有mechatronics层
- 其他都是与软件进行交互
- 驱动:基于信号和基于服务
- 基于信号是事件驱动的另一种说法:灵活性低
- 面向服务:松耦合,允许轻松添加软件
![图片]()
- mechatronics软件层:与硬件交互的层
- UDS在面向服务的层:
- UDS在以信号为基础的底层非常有效:
- 越接近硬件,UDS越适合处理各类问题
- UDS不太适合面向服务的层:
- 越接近云端,UDS越不能完成所需任务
- UDS不能做好的2方面:编程语言和运行环境
- 编程所产生的stack trace,UDS无法处理
- 面向服务的层有文件系统,有log,但没有故障存储
![图片]()
- UDS在以信号为基础的底层非常有效:
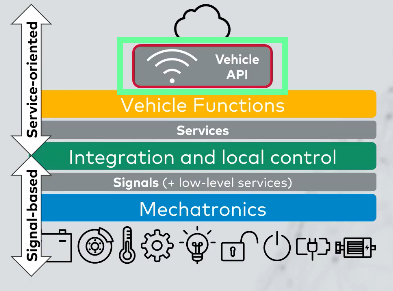
- 顶层的vehicle API:
- 进入车辆的通道,也是架构中面向服务的部分
- 一个面向服务的接入点
- 任何情况下,对车辆的访问都是服务为导向的
- 需要一种面向服务的车辆诊断(SOVD)
![图片]()
- SOVD:
- service-oriented vehicle diagnostics
- 面向服务的车辆诊断
- SOVD要有自描述性/可发现性
- 具有SOVD的车辆不需要ODX文件
- 当连接车辆,车辆会告诉你它支持哪些诊断
- SOVD可以进行远程remote 和近距离proximity 诊断
- SOVD提供了远程访问的标准化方法
- 远程诊断:意味着不需要用线缆连接车辆就能进行诊断
- 近距离诊断:意味着在车辆旁,但不一定与车辆连接
- 当然也可以通过线束连接车辆实现诊断功能
![图片]()

参考链接:
- B站:vector知识充电-合集
- "为什么需要功能安全和网络安全"到"SOVD"

 浙公网安备 33010602011771号
浙公网安备 33010602011771号