
无人驾驶技术之传感器部分简介
随着无人车技术发展越发成熟,越来越多人开始关注这个号称拥有万亿量级市场的新型行业。那么今天,我就先简
单介绍下通常无人车所拥有的传感器.
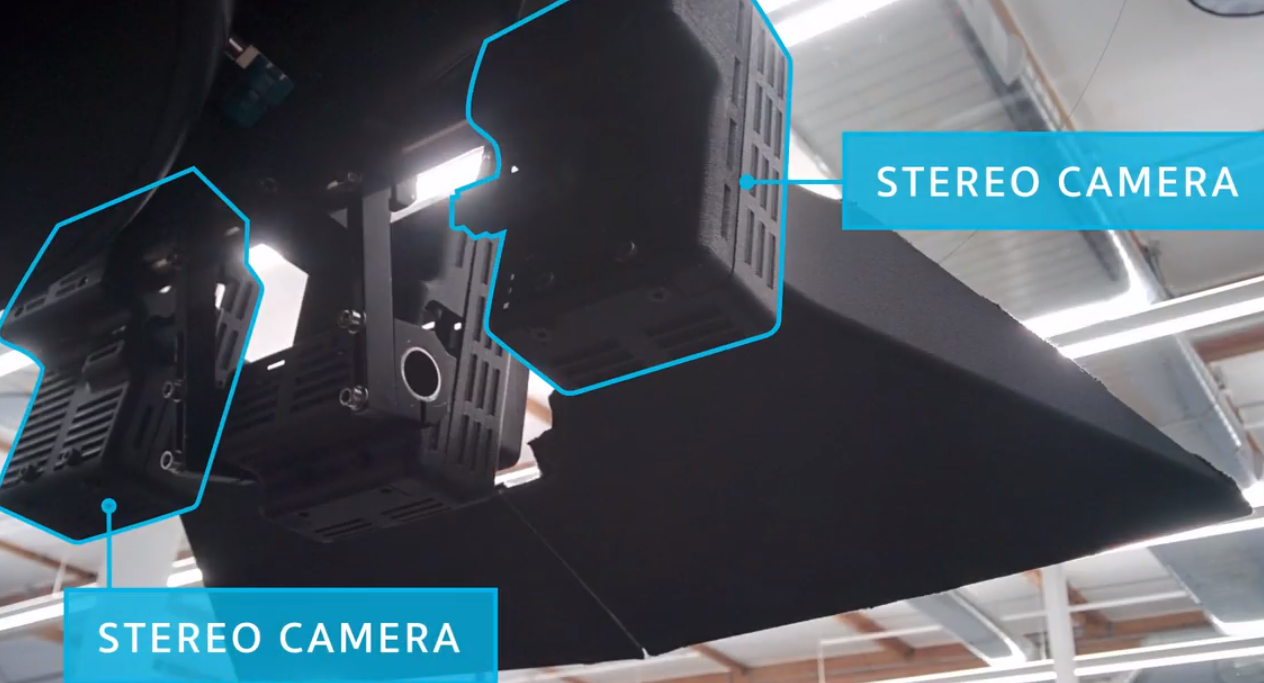
首先,在汽车前玻璃上装有两个摄像头,就像人眼一样,构立体图像,可以捕捉图像数据和距离数据.
其次,在两个立体相机中间是一个交通信号识别摄像头.通常交通信号灯在十字路口的另一边,因此需要特殊镜头,让摄像头捕捉足够的成像距离,可以检测远处的信号.

雷达,位于前保险杠的后面.其他传感器测量速度的方法是计算两次读数差,而雷达通过多普勒效应直接测量速度.多普勒相应根据对象在远离还是接近你,测量出雷达的频率变化.就像消防车报警器一样,当车辆正在远离你和驶向你时,听起来声音不一样.多普勒效应对传感器融合至关重要,因为它可以把速度作为独立的测量参数,从而提升了融合算法的收敛速度.雷达还可以生成环境的雷达地图,进而实现定位.因为雷达波在坚硬表面会回弹,因此它可以直接测量对象距离,无需在视线范围内也可以.雷达可以看到其他车辆底部,并发现可能会被阻挡的建筑物和对象.在车上的所有传感器中,雷达是最不容易受雨雾影响的,而且视野宽阔可以到到150度,距离可达200多米.
与激素雷达和摄像头相比.雷达分辨率较低,尤其在垂直方向,分辨率非常有限.分辨率第意味着来自静态物体的反射可能产生问题.例如街道上的检修孔盖或汽水罐,可能产生很高的雷达反射率,但它们并不大.我们将其称为雷达杂波.因为当前的车载雷达通常会忽视静态物体.
激光雷达是激光探测与测量的简称,而雷达则是无线电探测与测量的简称.雷达使用无线电波,而激光雷达则使用红激光束确定传感器和预附近对象的距离,目前的激光雷达大多使用900纳米波长长度的光源,但部分激素雷达使用的光波长度更长,在雨雾中性能更好.当前的激光雷达,使用旋转座架发射激光,扫描周边环境.激光是脉冲式的,脉冲被对象反射,然后返回一个点云,来代表这些物体.激光雷达的空间分辨率远高于雷达.因为激光束越聚焦,垂直方向的扫描层数量就越多,因此每层的激光雷达点的密度也越高.目前,激光雷达还不能直接测量对象的速度,必须使用两次或多次扫描之间的位置差来确定.激光雷达受天气和传感器清洁程度影响也更大,因此需要保持清洁,它们的块头也比其他传感器更大.因此也很难安装,除非你只想在车顶安装一个大的激光扫描器.
本期的无人车技术就先介绍到这里,下期是无人车定位的关键技术--Kalman Filter,敬请期待.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号