
坐标转换原理
一、坐标转换描述
坐标转换是空间实体的位置描述,是从一种坐标系统变换到另一种坐标系统的过程。通过建立两个坐标系统之间一一对应关系来实现。通常坐标转换有平移、缩放、旋转三个方面的转换。本文只详细讲述关于旋转部分的内容。
二、二维坐标旋转
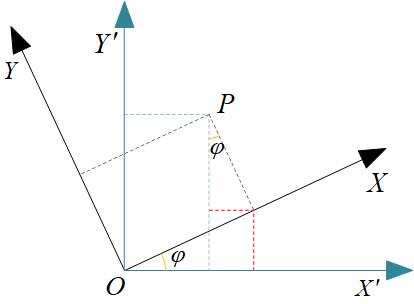
一个二维坐标系O-XY绕原点O旋转$\varphi $后变为另一个坐标系O-X'Y'。假设有一点P在O-XY坐标系下的坐标为(x,y),经旋转后在O-X'Y'坐标系下的坐标为(x',y'),则两套坐标系下的坐标的对应关系为
$\left\{\begin{matrix} x^{'}=xcos\varphi-ysin\varphi\\y^{'}=xsin\varphi+ycos\varphi \end{matrix}\right.$
将其写成矩阵形式为
$\begin{bmatrix}x^{'}\\ y^{'}\end{bmatrix}=\begin{bmatrix}cos\varphi & -sin\varphi\\ sin\varphi & cos\varphi \end{bmatrix}\begin{bmatrix}x\\ y\end{bmatrix}$
三、三维坐标旋转
三维坐标转换主要分为右手系(笛卡尔坐标系)和左手系(测量坐标系)两种,其分别绕Z、Y、X顺时针旋转$\kappa,\omega,\varphi $角度。现在来看一看各轴旋转后坐标的变化。
1、绕Z轴旋转
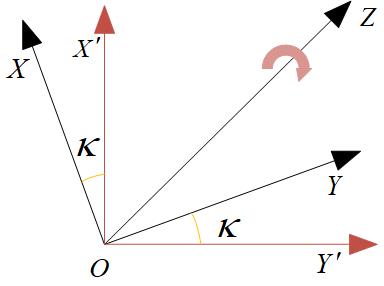
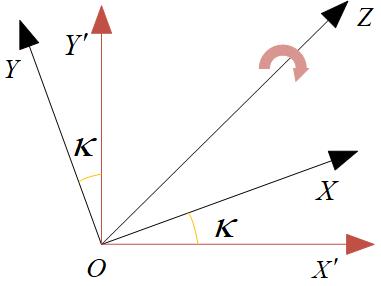
右:$\begin{bmatrix}x^{'}\\ y^{'}\\ z^{'}\end{bmatrix}=\begin{bmatrix} cos\kappa&sin\kappa&0\\-sin\kappa&cos\kappa&0\\0&0&1\\ \end{bmatrix}\begin{bmatrix}x\\ y\\ z\end{bmatrix}$ 左:$\begin{bmatrix}x^{'}\\ y^{'}\\ z^{'}\end{bmatrix}=\begin{bmatrix} cos\kappa & -sin\kappa & 0\\sin\kappa & cos\kappa & 0\\ 0 & 0 &1\\ \end{bmatrix}\begin{bmatrix}x\\ y\\ z\end{bmatrix}$
2、绕Y轴旋转

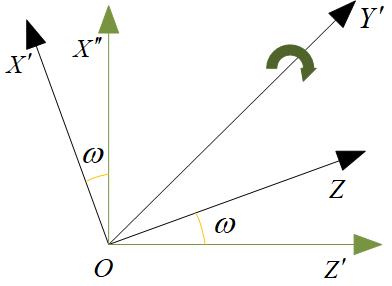
右:$\begin{bmatrix}x^{''}\\ y^{''}\\ z^{''}\end{bmatrix}=\begin{bmatrix} cos\omega &0&-sin\omega \\0&1&0\\sin\omega&0 &cos\omega \\ \end{bmatrix}\begin{bmatrix}x^{'}\\ y^{'}\\ z^{'}\end{bmatrix}$ 左:$\begin{bmatrix}x^{''}\\ y^{''}\\ z^{''}\end{bmatrix}=\begin{bmatrix} cos\omega &0&sin\omega \\0&1&0\\-sin\omega&0 &cos\omega\end{bmatrix}\begin{bmatrix}x^{'}\\ y^{'}\\ z^{'}\end{bmatrix}$
3、绕X轴旋转

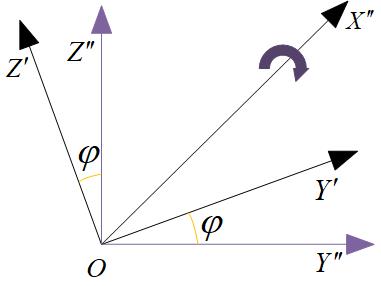
右:$\begin{bmatrix}x^{'''}\\ y^{'''}\\ z^{'''}\end{bmatrix}=\begin{bmatrix}1 & 0 & 0\\ 0 & cos\varphi & sin\varphi\\0 & -sin\varphi & cos\varphi\\ \end{bmatrix}\begin{bmatrix}x^{''}\\ y^{''}\\ z^{''}\end{bmatrix}$左:$\begin{bmatrix}x^{'''}\\ y^{'''}\\ z^{'''}\end{bmatrix}=\begin{bmatrix}1 & 0 & 0\\ 0 & cos\varphi & -sin\varphi\\0 & sin\varphi & cos\varphi\\ \end{bmatrix}\begin{bmatrix}x^{''}\\ y^{''}\\ z^{''}\end{bmatrix}$
4、旋转矩阵融合
将三轴的旋转融合为一个旋转矩阵R 。
右:$\begin{bmatrix}x^{'''}\\ y^{'''}\\ z^{'''}\end{bmatrix}=\begin{bmatrix}1 & 0 & 0\\ 0 & cos\varphi & sin\varphi\\0 & -sin\varphi & cos\varphi\\ \end{bmatrix}\begin{bmatrix} cos\omega &0&-sin\omega \\0&1&0\\sin\omega&0 &cos\omega \\ \end{bmatrix}\begin{bmatrix} cos\kappa&sin\kappa&0\\-sin\kappa&cos\kappa&0\\0&0&1\\ \end{bmatrix}\begin{bmatrix}x\\ y\\ z\end{bmatrix}=\begin{bmatrix}r_{11} & r_{12} & r_{13}\\ r_{21} & r_{22} & r_{23}\\ r_{31} & r_{32} & r_{33}\end{bmatrix}\begin{bmatrix}x\\ y\\ z\end{bmatrix}$
左:$\begin{bmatrix}x^{'''}\\ y^{'''}\\ z^{'''}\end{bmatrix}=\begin{bmatrix}1 & 0 & 0\\ 0 & cos\varphi & -sin\varphi\\0 & sin\varphi & cos\varphi\\ \end{bmatrix}\begin{bmatrix} cos\omega &0&sin\omega \\0&1&0\\-sin\omega&0 &cos\omega\end{bmatrix}\begin{bmatrix} cos\kappa & -sin\kappa & 0\\sin\kappa & cos\kappa & 0\\ 0 & 0 &1\\ \end{bmatrix}\begin{bmatrix}x\\ y\\ z\end{bmatrix}=\begin{bmatrix}r_{11} & r_{12} & r_{13}\\ r_{21} & r_{22} & r_{23}\\ r_{31} & r_{32} & r_{33}\end{bmatrix}\begin{bmatrix}x\\ y\\ z\end{bmatrix}$
右手坐标系得旋转矩阵R的各个元素为
$\left\{\begin{matrix}r_{11}=cos\omega cos\kappa &r_{12}=cos\omega sin\kappa &r_{13}=-sin\omega \\ r_{21}=-cos\varphi sin\kappa +sin\varphi sin\omega cos\kappa & r_{22}=cos\varphi cos\kappa +sin\varphi sin\omega sin\kappa &r_{23}=sin\varphi cos\omega \\ r_{31}=sin\varphi sin\kappa +cos\varphi sin\omega cos\kappa&r_{32}=-sin\varphi cos\kappa +cos\varphi sin\omega sin\kappa&r_{33}=cos\varphi cos\omega \end{matrix}\right.$
左手坐标系得旋转矩阵R的各个元素为
$\left\{\begin{matrix}r_{11}=cos\omega cos\kappa &r_{12}=-cos\omega sin\kappa &r_{13}=sin\omega \\ r_{21}=cos\varphi sin\kappa +sin\varphi sin\omega cos\kappa & r_{22}=cos\varphi cos\kappa -sin\varphi sin\omega sin\kappa &r_{23}=-sin\varphi cos\omega \\ r_{31}=sin\varphi sin\kappa -cos\varphi sin\omega cos\kappa&r_{32}=sin\varphi cos\kappa +cos\varphi sin\omega sin\kappa&r_{33}=cos\varphi cos\omega \end{matrix}\right.$
posted on 2019-04-30 17:06 ambitionzz 阅读(13023) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号