图像增强的常用算法
图像增强的常用算法,包括它们的原理、数学逻辑、适用场景和OpenCV实现方式,我会结合你小视场高精度测量(如标定板图像、尺寸测量图像)的需求,从基础到进阶拆解,让你清楚不同算法的适用场景和选择逻辑。
核心前提
图像增强的核心目的是:提升图像的视觉质量或特征辨识度(如增强对比度、突出边缘、提升亮度),为后续的标定、测量等处理打下基础。根据处理维度,可分为「空域增强」(直接操作像素值)和「频域增强」(转换到频域处理)两大类。
一、空域增强(最常用,直接操作像素)
空域增强直接对图像的像素值进行数学变换,计算效率高,是你的场景首选。
1. 对比度增强(灰度变换)
(1)线性对比度拉伸(Min-Max归一化)
原理
适用场景
- 图像整体偏暗/偏亮,灰度范围窄(如标定板图像因曝光不足导致棋盘格不清晰);
- 你的小视场测量中,提升标定板黑白格的对比度,便于角点检测。
代码实现
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
cv::Mat img = cv::imread("low_contrast.jpg", cv::IMREAD_GRAYSCALE); // 读取灰度图
if (img.empty()) {
std::cout << "无法读取图像" << std::endl;
return -1;
}
// 1. 线性对比度拉伸
double minVal, maxVal;
cv::minMaxLoc(img, &minVal, &maxVal); // 获取灰度最值
cv::Mat stretchImg;
img.convertTo(stretchImg, CV_32F); // 转换为浮点型避免溢出
stretchImg = (stretchImg - minVal) / (maxVal - minVal) * 255;
stretchImg.convertTo(stretchImg, CV_8U); // 转回8位灰度图
cv::imshow("原图", img);
cv::imshow("线性拉伸", stretchImg);
cv::waitKey(0);
return 0;
}
(2)伽马校正(Gamma Correction)
原理
非线性灰度变换,校正图像的亮度偏差(人眼对亮度的感知是非线性的):
适用场景
- 图像过亮/过暗,且灰度分布不均匀(如标定板图像有反光/阴影);
- 你的场景中,$\gamma$ 取0.5~1.5可有效提升标定板角点的辨识度。
代码实现
// 伽马校正
float gamma = 0.8; // 可调,<1提升亮度,>1降低亮度
cv::Mat gammaImg;
cv::Mat lookupTable(1, 256, CV_8U); // 查找表(提升效率)
uchar* p = lookupTable.ptr();
for (int i = 0; i < 256; i++) {
p[i] = cv::saturate_cast<uchar>(255 * pow(i / 255.0, gamma));
}
cv::LUT(img, lookupTable, gammaImg); // 应用查找表
(3)直方图均衡化
原理
将图像的灰度直方图拉伸为均匀分布,最大化对比度:
- 核心:累积分布函数(CDF)映射,让每个灰度级的像素数大致相等。
适用场景
- 图像对比度低且灰度分布不均(如低光照下的测量图像);
- 注意:会放大噪声,建议先去噪再均衡化。
代码实现
// 普通直方图均衡化
cv::Mat eqImg;
cv::equalizeHist(img, eqImg);
// 自适应直方图均衡化(CLAHE,更优,避免局部过曝)
cv::Ptr<cv::CLAHE> clahe = cv::CLAHE::create();
clahe->setClipLimit(2.0); // 对比度限制(避免噪声放大)
clahe->setTilesGridSize(cv::Size(8,8)); // 分块大小
clahe->apply(img, eqImg); // 自适应均衡化(你的场景首选)
2. 边缘增强(突出细节)
(1)拉普拉斯滤波
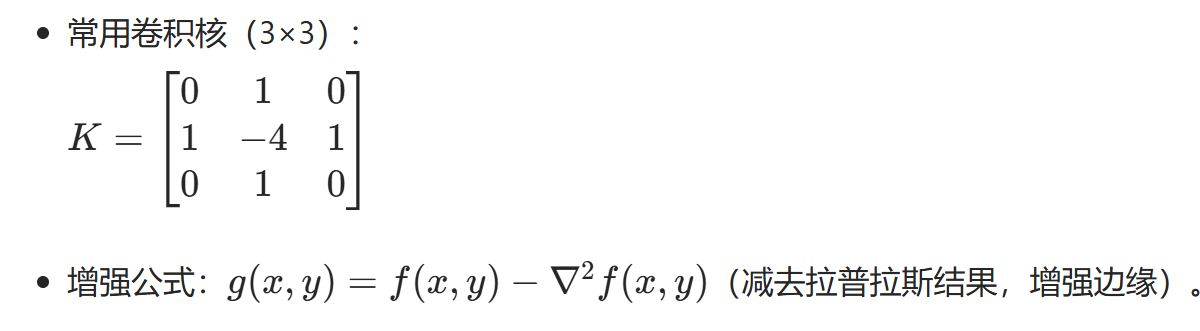
原理
二阶微分算子,突出灰度突变的边缘(如标定板的黑白格边缘):
- 常用卷积核(3×3):
![image]()
适用场景
- 突出图像的精细边缘(如测量目标的轮廓、标定板角点);
- 需结合平滑滤波(如高斯滤波)使用,避免放大噪声。
代码实现
// 拉普拉斯边缘增强
cv::Mat laplacianImg, edgeEnhanceImg;
cv::GaussianBlur(img, img, cv::Size(3,3), 1.0); // 先去噪
cv::Laplacian(img, laplacianImg, CV_16S, 3); // 拉普拉斯滤波(16位避免溢出)
cv::convertScaleAbs(laplacianImg, laplacianImg); // 转回8位
edgeEnhanceImg = img - laplacianImg; // 增强边缘
(2)高通滤波(Unsharp Mask)
原理
“锐化=原图 - 模糊图”,突出细节:
- 步骤:原图 - 高斯模糊图 → 边缘细节 → 原图 + 细节×权重。
适用场景
- 提升图像的清晰度(如标定板图像的角点细节);
- 你的场景中,权重取0.5~1.0效果最佳。
代码实现
// Unsharp Mask锐化
cv::Mat blurImg, sharpImg;
cv::GaussianBlur(img, blurImg, cv::Size(5,5), 1.5); // 高斯模糊
float alpha = 1.0; // 细节权重
float beta = -0.5; // 模糊图权重
cv::addWeighted(img, alpha, blurImg, beta, 0, sharpImg); // 锐化
二、频域增强(进阶,适合复杂噪声/模糊)
频域增强先将图像转换到频域(傅里叶变换),处理后再转换回空域,适合处理周期性噪声、运动模糊等复杂问题。
1. 高通滤波(频域)
原理
保留频域的高频分量(对应图像边缘、细节),滤除低频分量(对应图像平滑区域),实现锐化。
代码实现
// 频域高通滤波(简化版)
cv::Mat fftImg, fftShift, highPassImg;
// 1. 傅里叶变换
cv::dft(img, fftImg, cv::DFT_COMPLEX_OUTPUT);
// 2. 中心化(低频移到中心)
cv::fftShift(fftImg, fftShift);
// 3. 构建高通掩码(保留中心外的高频)
int cx = fftShift.cols / 2, cy = fftShift.rows / 2;
cv::Mat mask = cv::Mat::ones(fftShift.size(), CV_8UC2);
cv::circle(mask, cv::Point(cx, cy), 30, cv::Scalar(0,0), -1); // 低频区域置0
// 4. 应用掩码
fftShift = fftShift.mul(mask);
// 5. 逆中心化+逆傅里叶变换
cv::fftShift(fftShift, fftImg);
cv::idft(fftImg, highPassImg, cv::DFT_SCALE | cv::DFT_REAL_OUTPUT);
2. 低通滤波(频域)
原理
保留频域的低频分量,滤除高频噪声(如椒盐噪声、高斯噪声),效果类似高斯滤波,但可精准控制滤波范围。
三、图像增强算法选择指南(针对你的场景)
| 问题类型 | 推荐算法 | 核心优势 |
|---|---|---|
| 标定板图像偏暗/对比度低 | 自适应直方图均衡化(CLAHE) | 提升对比度,避免局部过曝 |
| 图像有反光/阴影 | 伽马校正 | 非线性调整亮度,保留细节 |
| 标定板角点不清晰 | Unsharp Mask锐化 + 高斯滤波 | 锐化细节,同时抑制噪声 |
| 低光照下的测量图像 | 线性拉伸 + CLAHE | 最大化灰度范围,提升辨识度 |
总结
- 基础增强:线性拉伸、伽马校正适合快速调整亮度/对比度,是你的场景首选;
- 进阶增强:CLAHE(自适应直方图均衡化)兼顾全局和局部对比度,避免噪声放大;
- 细节增强:Unsharp Mask锐化、拉普拉斯滤波可突出标定板角点/测量目标边缘;
- 实操建议:先去噪(双边滤波/中值滤波)→ 再增强(CLAHE/伽马校正)→ 最后锐化,最大化提升图像质量。
直方图均衡化的原理

 浙公网安备 33010602011771号
浙公网安备 33010602011771号