
立体匹配后处理的左右一致性检查是什么原理?
左右一致性检查(Left-Right Consistency Check)原理与实现
左右一致性检查是立体匹配后处理的核心步骤,目的是剔除错误匹配的视差点,提升视差图的精度和鲁棒性。其本质是利用双目视觉的对称性约束,验证匹配结果的合理性,广泛应用于SGM、BM等传统立体匹配算法中。
一、核心原理:双目匹配的对称性约束
1. 通俗解释
2. 数学定义
3. 直观示意图
| 左图像素 | 左视差 $d_l$ | 右图对应像素 | 右视差 $d_r$ | 回算左像素 | 一致性判定 |
|---|---|---|---|---|---|
| $P_l(100,50)$ | $d_l=10$ | $P_r(90,50)$ | $d_r=10$ | $90+10=100$ | $ |
| $P_l(200,80)$ | $d_l=15$ | $P_r(185,80)$ | $d_r=8$ | $185+8=193$ | $ |
二、关键概念区分
1. 正向视差图 vs 反向视差图
| 类型 | 计算方式 | 用途 |
|---|---|---|
| 正向视差图 $D_l$ | 以左图为参考,右图为目标,计算左图每个像素的视差 | 常规立体匹配输出 |
| 反向视差图 $D_r$ | 以右图为参考,左图为目标,计算右图每个像素的视差 | 仅用于一致性检查,无需保存完整图 |
2. 为什么错误匹配会不满足一致性?
错误匹配的常见原因:
- 低纹理区域:如墙面、天空,像素相似度高,容易匹配到错误位置;
- 重复纹理区域:如棋盘格、地砖,容易产生歧义匹配;
- 遮挡区域:左图可见但右图被遮挡的区域,无法找到正确匹配点。
这些错误匹配的视差不满足双向可逆性,因此会被一致性检查过滤掉。
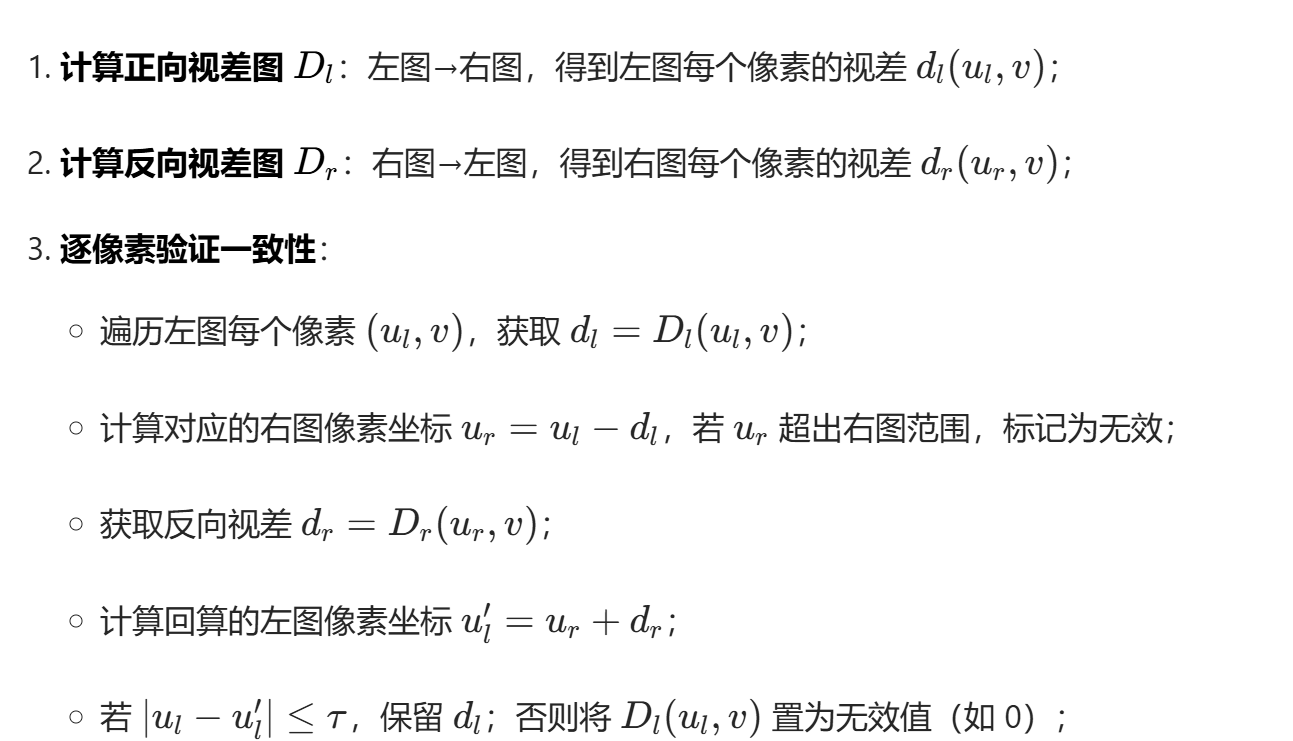
三、算法步骤(工程实现流程)
左右一致性检查的完整执行步骤如下:
四、C++/OpenCV 实现代码示例
以下是基于SGM算法的左右一致性检查实现,核心是生成正向/反向视差图并验证约束:
#include <opencv2/opencv.hpp>
#include <opencv2/ximgproc.hpp>
using namespace cv;
using namespace std;
// 左右一致性检查函数
void leftRightConsistencyCheck(Mat& dispL, Mat& dispR, Mat& dispFiltered, int tau = 1) {
// 输入视差图格式:16位有符号数(SGM输出格式)
CV_Assert(dispL.type() == CV_16S && dispR.type() == CV_16S);
CV_Assert(dispL.size() == dispR.size());
int height = dispL.rows;
int width = dispL.cols;
dispFiltered = Mat::zeros(dispL.size(), CV_16S); // 初始化滤波后的视差图
for (int v = 0; v < height; v++) {
short* dispL_ptr = dispL.ptr<short>(v);
short* dispR_ptr = dispR.ptr<short>(v);
short* filtered_ptr = dispFiltered.ptr<short>(v);
for (int uL = 0; uL < width; uL++) {
short dL = dispL_ptr[uL];
if (dL <= 0) continue; // 跳过无效视差
// 步骤1:计算对应的右图像素坐标 uR
int uR = uL - dL;
if (uR < 0 || uR >= width) continue; // 超出右图范围,无效
// 步骤2:获取反向视差 dR
short dR = dispR_ptr[uR];
if (dR <= 0) continue;
// 步骤3:验证一致性约束
int uL_recalc = uR + dR;
if (abs(uL - uL_recalc) <= tau) {
filtered_ptr[uL] = dL; // 满足约束,保留视差
}
// 不满足约束则置0(默认值)
}
}
}
int main() {
// 1. 读取校正后的左右图像
Mat imgL = imread("rect_left.png", IMREAD_GRAYSCALE);
Mat imgR = imread("rect_right.png", IMREAD_GRAYSCALE);
// 2. 初始化SGM立体匹配器
Ptr<StereoSGBM> sgbm = StereoSGBM::create(0, 16, 3);
sgbm->setP1(8 * 3 * 3);
sgbm->setP2(32 * 3 * 3);
sgbm->setUniquenessRatio(10);
sgbm->setSpeckleWindowSize(100);
sgbm->setSpeckleRange(32);
// 3. 计算正向视差图(左→右)和反向视差图(右→左)
Mat dispL, dispR;
sgbm->compute(imgL, imgR, dispL); // 正向视差
sgbm->compute(imgR, imgL, dispR); // 反向视差
// 4. 左右一致性检查
Mat dispFiltered;
leftRightConsistencyCheck(dispL, dispR, dispFiltered, 1);
// 5. 视差图可视化(转换为8位图像)
Mat dispL_8u, dispFiltered_8u;
normalize(dispL, dispL_8u, 0, 255, NORM_MINMAX, CV_8U);
normalize(dispFiltered, dispFiltered_8u, 0, 255, NORM_MINMAX, CV_8U);
imshow("原始视差图", dispL_8u);
imshow("滤波后视差图", dispFiltered_8u);
waitKey(0);
return 0;
}
五、关键参数与优化技巧
1. 容差阈值 $\tau$ 的选择
| $\tau$ 值 | 效果 | 适用场景 |
|---|---|---|
| $\tau=0$ | 严格约束,仅允许完全匹配的视差 | 高分辨率、低噪声图像 |
| $\tau=1$ | 常规选择,容忍1像素偏差 | 大多数工业场景 |
| $\tau=2$ | 宽松约束,容忍2像素偏差 | 低纹理、高噪声图像 |
2. 优化技巧
- 亚像素插值后再检查:对正向/反向视差图进行亚像素插值(如SGM的
setDisp12MaxDiff参数),可降低匹配偏差,提升检查精度; - 结合纹理阈值过滤:对低纹理区域(如梯度小于阈值的像素)直接标记为无效,减少一致性检查的计算量;
- 邻域填充无效点:对一致性检查标记的无效视差点,使用周围有效视差的中值或均值填充,减少视差图空洞;
- CUDA并行加速:逐像素遍历是计算瓶颈,可通过CUDA实现并行化(如
cv::cuda::StereoSGM),速度提升10倍以上。
六、应用局限性
左右一致性检查无法处理双向错误匹配(即正向和反向匹配都错误,但恰好满足一致性约束),这种情况在重复纹理区域可能发生。解决方法是:
- 结合纹理分析:对低纹理区域使用更保守的匹配策略;
- 引入深度学习后处理:如使用CNN对一致性检查后的视差图进行细化。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号