
什么是李代数
李代数(Lie Algebra):从通俗理解到数学本质(三维重建视角)
李代数是连接连续群与线性空间的桥梁,在三维重建、SLAM、机器人运动学等领域中,核心作用是处理旋转/位姿的连续变换,解决旋转矩阵(正交约束)带来的优化难题。
本文延续「通俗解释→数学定义→工程应用」的递进逻辑,重点结合相机位姿优化场景讲解李代数的价值。
一、通俗解释:为什么需要李代数?
在光束平差(BA)或SLAM中,我们需要优化相机位姿(旋转 $R$ + 平移 $t$),但直接优化旋转矩阵会遇到两个「坑」:
-
旋转矩阵的约束
![image]()
-
变换的连续性
相机的运动是连续的(比如从位姿1平滑移动到位姿2),旋转矩阵描述的是「最终姿态」,但无法直接描述「姿态的变化量」(即「增量旋转」)。

李代数的核心思想:
为旋转群(或位姿群)找到一个对应的线性空间,在这个线性空间中可以无约束地进行加减、求导、优化,优化完成后再映射回旋转群(得到合法的旋转矩阵)。
打个比方:

二、数学基础:群与李群
理解李代数前,必须先掌握李群(Lie Group)——李代数是李群的「伴生结构」。
2.1 群(Group):代数结构的定义
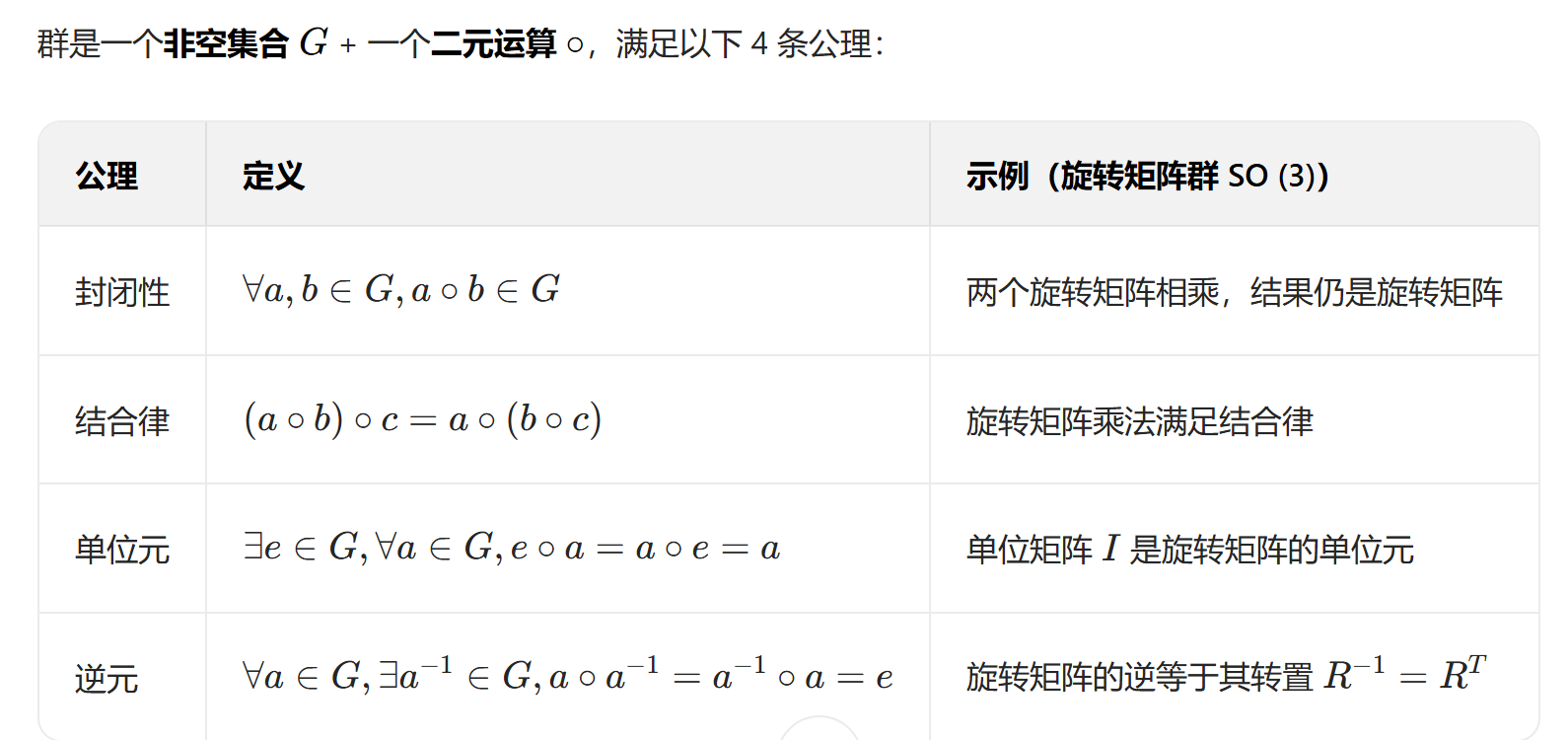
2.2 李群(Lie Group):连续的群
李群是既是群,又是光滑流形的结构——通俗说,就是群中的元素是连续变化的。
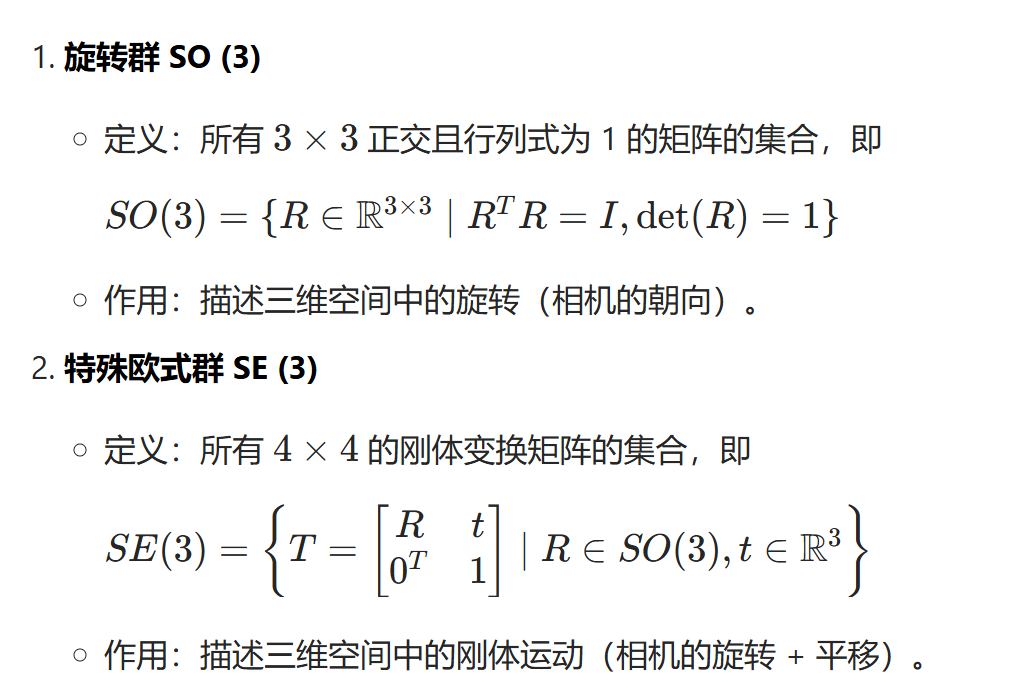
在三维重建中,最常用的两个李群:
李群的痛点:元素是矩阵,满足非线性约束,无法直接进行微分和优化。
三、李代数的定义:李群的「线性化工具」
3.1 核心定义
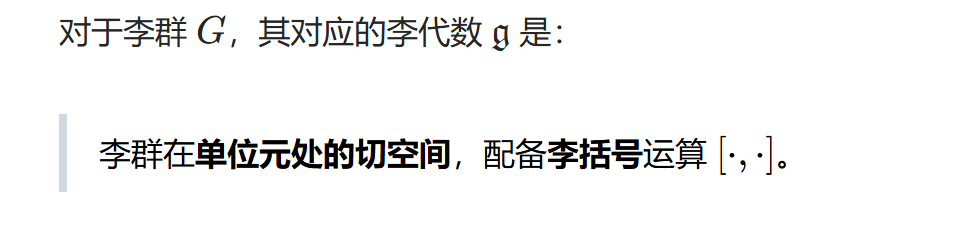
这句话的关键是两个概念:
- 切空间:在李群的单位元(比如SO(3)的单位矩阵$I$)上,所有「相切方向」构成的线性空间——这个空间是无约束的向量空间,可以自由进行加减、数乘、求导。
- 李括号:定义在切空间上的二元运算,描述两个向量的「非交换性」(对应李群中元素乘法的非交换性,比如三维旋转不满足交换律)。
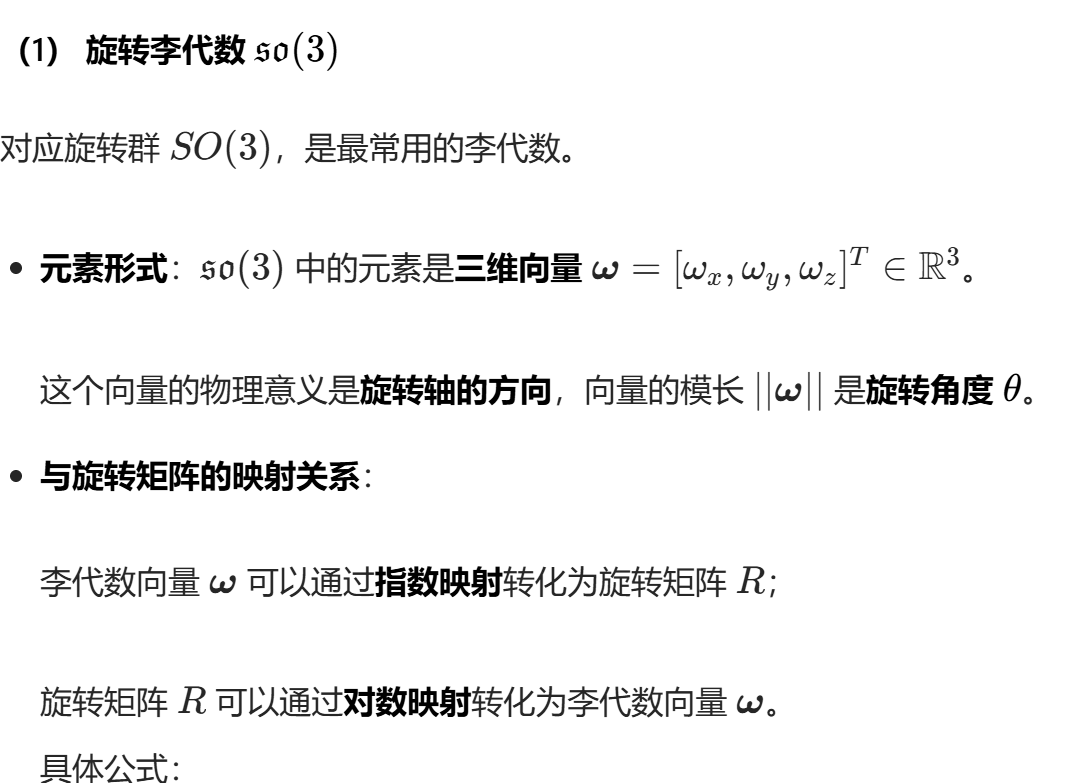
3.2 三维重建中常用的李代数
具体公式:
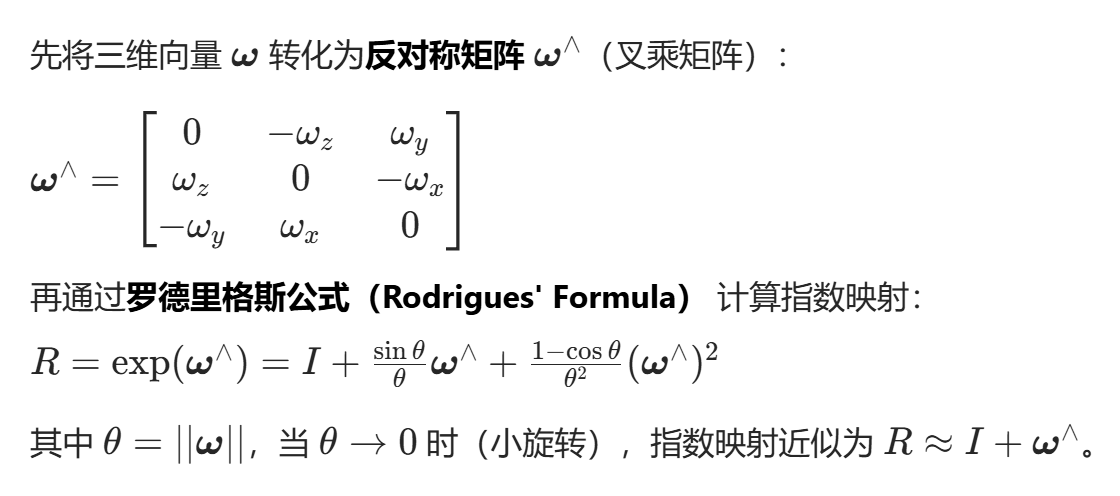
-
指数映射(李代数→旋转矩阵)
![image]()
-
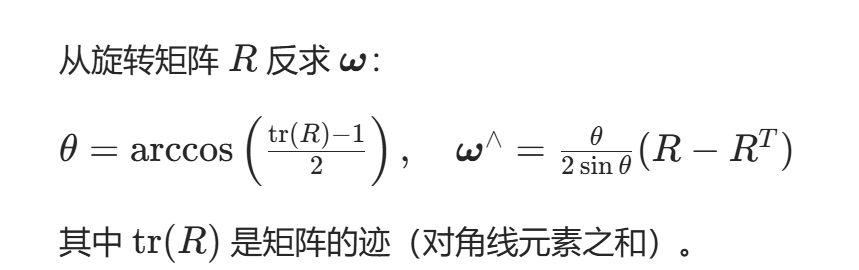
对数映射(旋转矩阵→李代数)
![image]()
(2) 位姿李代数 $\mathfrak{se}(3)$

3.3 李括号运算

四、李代数的核心价值:解决优化中的约束问题
在光束平差(BA)中,优化相机位姿时,李代数的作用体现在两个核心场景:
4.1 无约束优化相机位姿

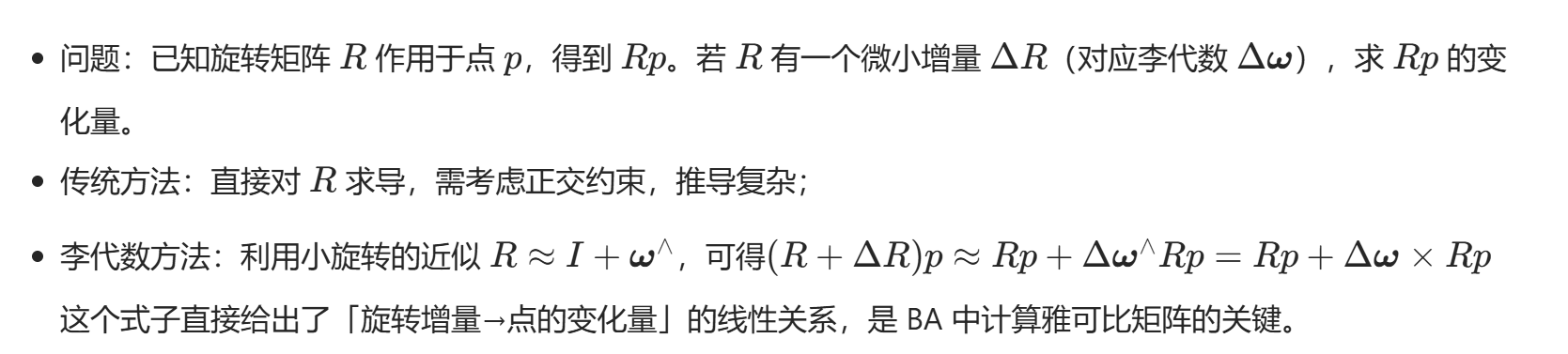
4.2 高效计算导数(扰动模型)
在BA中,需要计算重投影误差关于相机位姿的导数(雅可比矩阵),李代数的扰动模型可以大幅简化求导过程。
以旋转为例:
五、工程实现:李代数的代码应用(C++/Eigen)
在实际开发中,通常不需要手动实现指数/对数映射,可使用Sophus库(专为李代数设计的C++库,基于Eigen)。
5.1 安装Sophus
Sophus支持SO(3)和SE(3)的李代数运算,可通过源码编译安装:
git clone https://github.com/strasdat/Sophus.git
cd Sophus && mkdir build && cd build
cmake .. && make -j4
5.2 核心代码示例
#include <iostream>
#include <Eigen/Core>
#include <sophus/se3.hpp>
int main() {
// 1. 定义旋转矩阵 R(绕z轴旋转90度)
double theta = M_PI / 2;
Eigen::Matrix3d R;
R << cos(theta), -sin(theta), 0,
sin(theta), cos(theta), 0,
0, 0, 1;
// 2. 旋转矩阵 → 李代数 so(3)
Sophus::SO3d SO3_R(R); // 李群 SO(3)
Eigen::Vector3d so3 = SO3_R.log(); // 对数映射 → 李代数向量
std::cout << "so3 = " << so3.transpose() << std::endl;
// 输出: so3 = 0 0 1.5708 (对应绕z轴旋转π/2)
// 3. 李代数 → 旋转矩阵(指数映射)
Sophus::SO3d SO3_so3 = Sophus::SO3d::exp(so3);
std::cout << "R from so3 = \n" << SO3_so3.matrix() << std::endl;
// 4. 位姿李代数 se(3) 示例
Eigen::Vector3d t(1, 0, 0); // 平移向量
Sophus::SE3d SE3_Rt(R, t); // 李群 SE(3)
Eigen::Vector6d se3 = SE3_Rt.log(); // 对数映射 → 六维李代数向量
std::cout << "se3 = " << se3.transpose() << std::endl;
// 输出: se3 = 1 0 0 0 0 1.5708 (前3维平移,后3维旋转)
// 5. 小扰动模型(计算雅可比常用)
Eigen::Vector3d delta_omega(0.01, 0, 0); // 微小旋转增量
Sophus::SO3d SO3_delta = Sophus::SO3d::exp(delta_omega);
Sophus::SO3d SO3_new = SO3_R * SO3_delta; // 旋转更新
std::cout << "new R = \n" << SO3_new.matrix() << std::endl;
return 0;
}
六、总结
| 概念 | 本质 | 形式 | 核心作用 |
|---|---|---|---|
| 李群 SO(3)/SE(3) | 连续变换群(有约束) | 矩阵 | 描述相机的旋转/位姿 |
李代数 |
|||
| 李群单位元的切空间(无约束) | 向量(3维/6维) | 优化位姿、计算导数 | |
| 指数映射 | 切空间→李群 |  |
|
| 优化结果→合法矩阵 | |||
| 对数映射 | 李群→切空间 | $\log(R)$ | 矩阵→优化变量 |
李代数的核心价值,是将有约束的矩阵优化问题,转化为无约束的向量优化问题,这也是它成为三维重建、SLAM领域基础工具的根本原因。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号