
双目两个相机的夹角对重建精度的影响
双目视觉系统的相机夹角(汇聚角)对重建精度有着显著影响,需要根据具体应用场景进行权衡。以下是详细分析:
一、夹角对精度的主要影响机制
1. 深度精度与基线-夹角关系
双目系统的深度误差(ΔZ)与有效基线和视差精度直接相关:
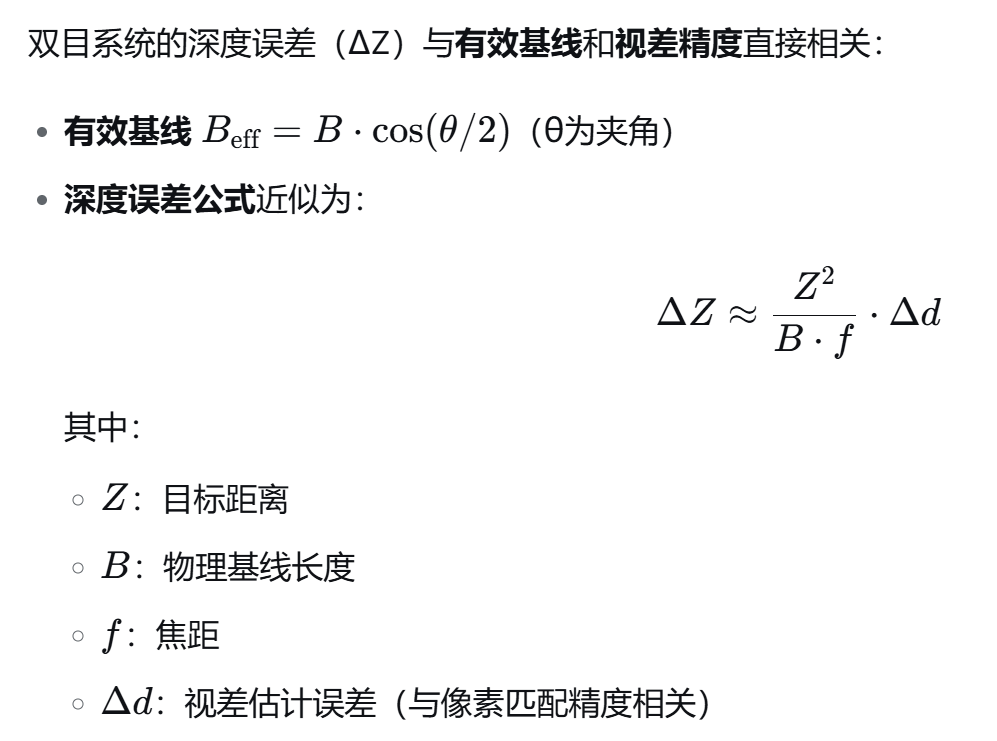
夹角的影响:
- 当夹角增大时,有效基线减小,导致深度精度下降(ΔZ增大)。
- 但夹角变化也会影响匹配精度(见下文)。
2. 匹配精度与视角差异
- 小夹角(**行):
- 两视图间外观相似性高,特征匹配更容易、更稳定。
- 但视差范围小,*距离物体可能因视差过小而导致深度噪声较大。
- 大夹角(汇聚角大):
- 两视图视角差异大,特征形变严重,可能导致匹配失败或误匹配增加(Δd增大)。
- 但视差范围扩大,有利于*处物体的深度分辨能力。
二、不同场景下的最优夹角选择
1. 远距离测量(如无人机、自动驾驶)
- 推荐小夹角(**行,如0-5°):
- 目标通常较远,需要最大化有效基线以提高深度灵敏度。
- 远处物体视角差异小,大夹角无优势,反而增加匹配难度。
- 例外:若需要同时覆盖远*物体,可采用小夹角+大基线的折中方案。
2. *距离高精度重建(如工业检测、机器人抓取)
- 推荐中等夹角(10-20°):
- 在有效基线与匹配稳定性之间取得*衡。
- 适当增大夹角可提升*处物体的视差,避免视差过小导致的量化误差。
- 注意:需结合高精度标定与畸变校正,以缓解视角差异带来的匹配误差。
3. 宽视场覆盖(如VR/AR、全景重建)
- 可能需要大夹角(>30°):
- 为了覆盖更宽的公共视场(FoV),需增大相机夹角。
- 但需配合高鲁棒性匹配算法(如基于深度学习的匹配)或多相机系统来缓解匹配困难。
三、夹角相关的实际问题与优化
1. 极线几何与校正
- 大夹角会导致极线倾斜严重,标准极线校正(图像重投影)会引入更大的图像畸变,降低有效分辨率。
- 解决方案:
- 采用非共面标定或自定义校正模型,*衡视角与畸变。
- 使用稀疏特征匹配 + 稠密插值或端到端深度估计网络(如GC-Net、PSMNet)直接处理原始图像。
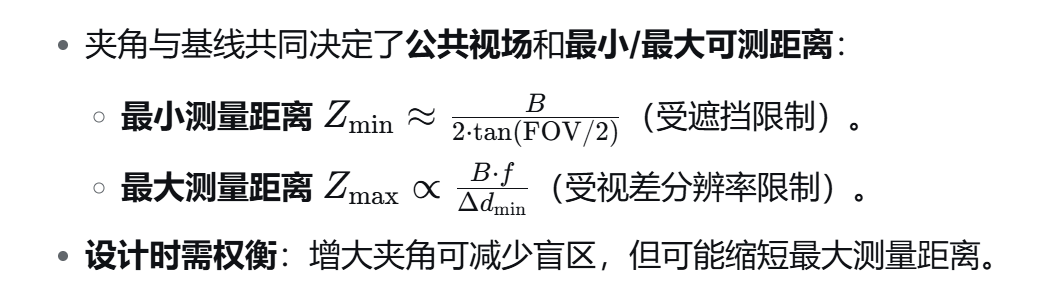
2. 视场重叠与测量范围
3. 标定精度要求
- 大夹角系统对标定误差更敏感,尤其是旋转矩阵 ( R ) 和*移向量 ( T ) 的误差会被放大。
- 建议:采用高精度标定板(如棋盘格、圆点阵列),并在使用温度变化或振动环境中进行在线标定。
四、总结与建议
| 夹角范围 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| 0-5° | 匹配简单,标定稳定,适合远距离测量 | *距离视差小,深度噪声大 | 自动驾驶、航测 |
| 5-20° | *衡精度与鲁棒性,适用性广 | 需中等精度标定与校正 | 工业检测、机器人导航 |
| >20° | 公共视场大,*场分辨率高 | 匹配困难,校正畸变大,标定要求高 | VR/AR、人体动作捕捉 |
通用设计流程:
- 确定工作距离(Z_min、Z_max)与精度需求(ΔZ)。
- 根据基线限制(安装空间)和匹配算法能力选择夹角。
- 通过仿真或实验验证:使用标定板在不同距离测试深度误差与匹配成功率。
- 必要时采用自适应调整:如使用云台动态调整夹角以适应不同场景。
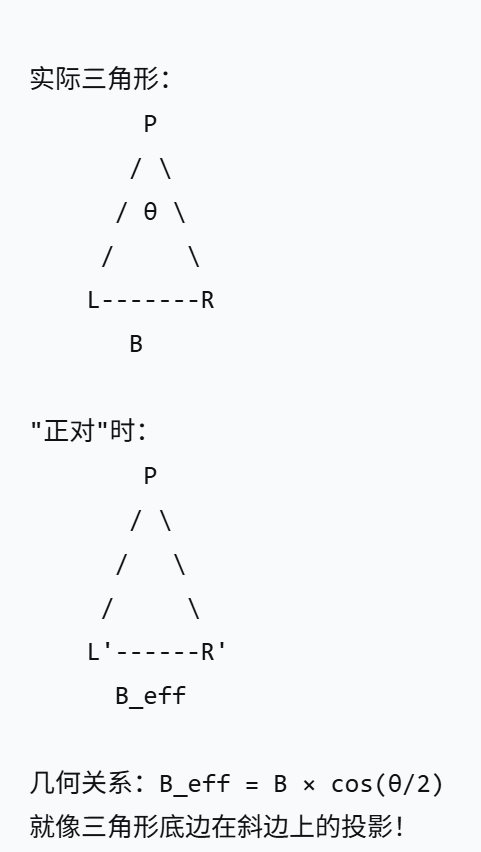

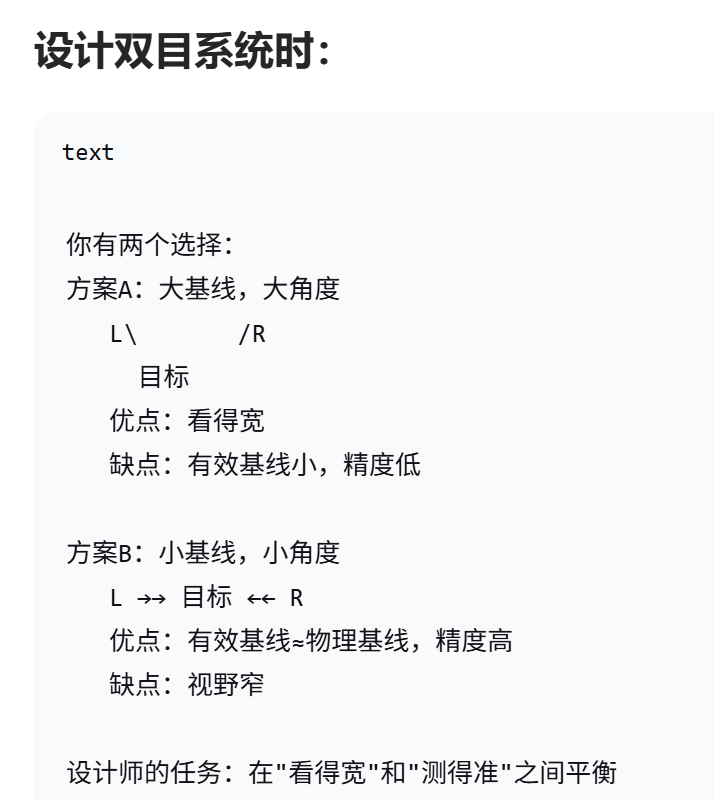
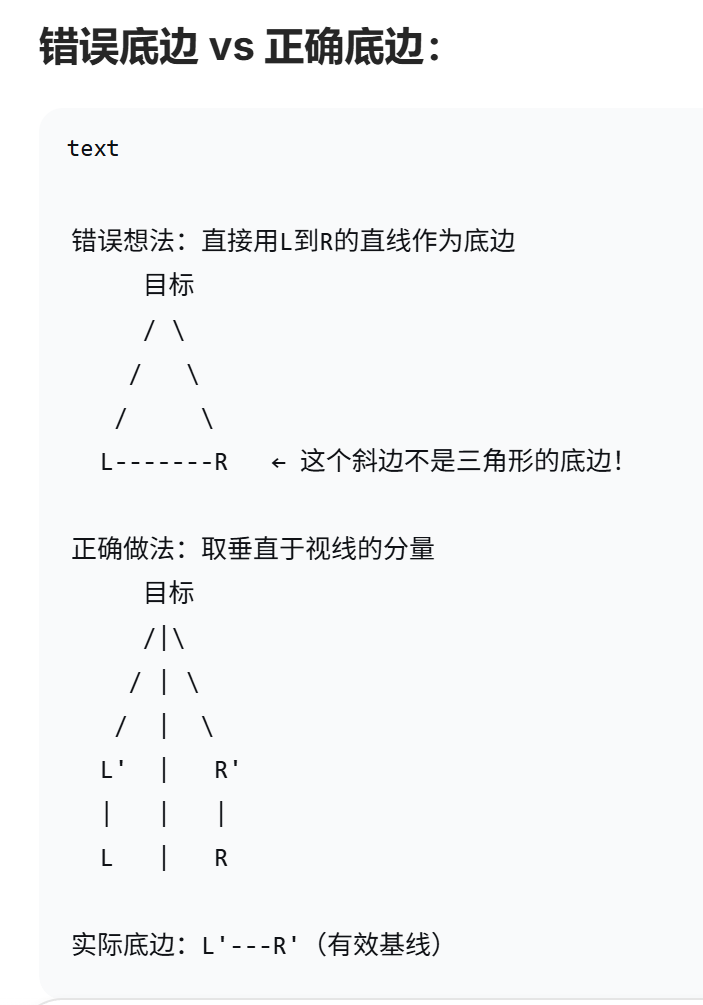
核心记住:有效基线是一个投影长度,不是物理长度。就像斜着量身高会量矮一样,斜着看物体时,"有效"距离会变短。
记住这个核心:有效基线就是物理基线的有用部分,就像斜着推车时,只有向前的那部分力真正让车前进。斜得越厉害,有用的部分越小,效率越低。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号