只投影竖直条纹的话,在双目中可以利用极线约束来求解全局相位
在双目立体视觉系统中,仅投影竖直条纹时,确实可以通过极线约束来弥补y方向相位信息的缺失,进而求解全局相位并完成三维重建。这本质上是“结构光相位信息”与“双目立体匹配约束”的结合方案,和单目结构光必须依赖横竖交叉条纹的逻辑有本质区别。
下面我们从原理可行性、核心优势、局限性三个维度,详细分析这种方案的技术逻辑:
一、 核心原理:竖直条纹+极线约束如何求解全局相位?
在双目结构光系统中,左右相机同时拍摄被竖直条纹照射的物体,核心步骤如下:
- 单相机提取水平相位信息
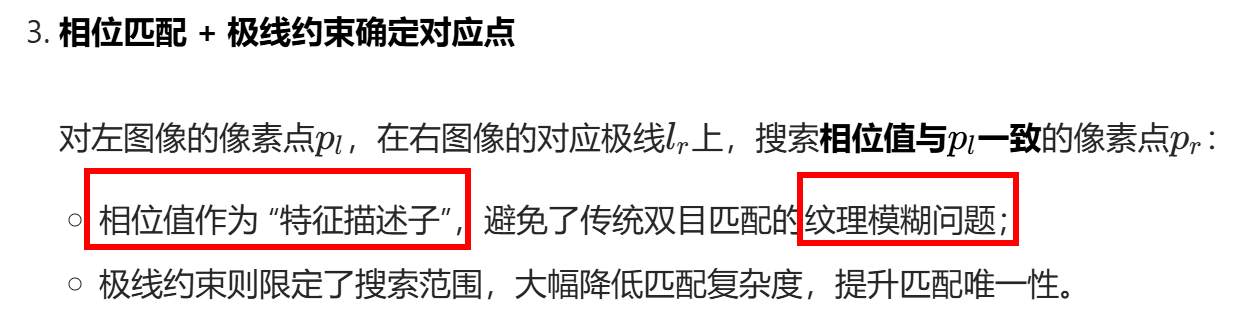
对左右相机的图像分别进行相位提取,仅竖直条纹只能得到水平方向的包裹相位(对应投影仪x轴方向的相位值,记为$\phi_H$),此时每个像素的相位信息是一维的(只有x方向约束)。
- 双目三角化重建三维坐标
当左右图像的对应点$p_l/p_r$确定后,结合双目相机的内外参,通过三角化原理直接计算该点的三维世界坐标——无需依赖竖直方向的相位信息。
二、 这种方案的核心优势
-
减少投影条纹数量,提升重建效率
- 交叉线方案需要投影竖直条纹+水平条纹(通常各2-3组用于解包裹),总投影次数≥4次;
- 仅竖直条纹方案只需投影2-3组条纹,投影次数减少50%,适合动态场景的快速重建(如运动物体扫描)。
-
降低相位解算复杂度,避免横竖相位耦合误差
- 交叉线方案需要分别解算水平/竖直两个方向的相位,再进行相位-坐标映射,存在横竖相位配准误差;
- 仅竖直条纹方案只需处理一维相位,解算流程更简单,且相位值仅用于双目匹配,无需映射到投影仪y坐标。
-
对投影仪标定要求降低
- 交叉线方案需要高精度的投影仪-相机单应性矩阵,才能将横竖相位值转换为投影仪二维坐标;
- 仅竖直条纹方案无需求解投影仪的y坐标映射,投影仪标定仅需保证条纹周期稳定,无需精确的像素级标定。
三、 这种方案的局限性(对比交叉线方案)
虽然极线约束可以弥补竖直条纹的一维信息缺陷,但相比交叉线方案,仍存在明显短板:
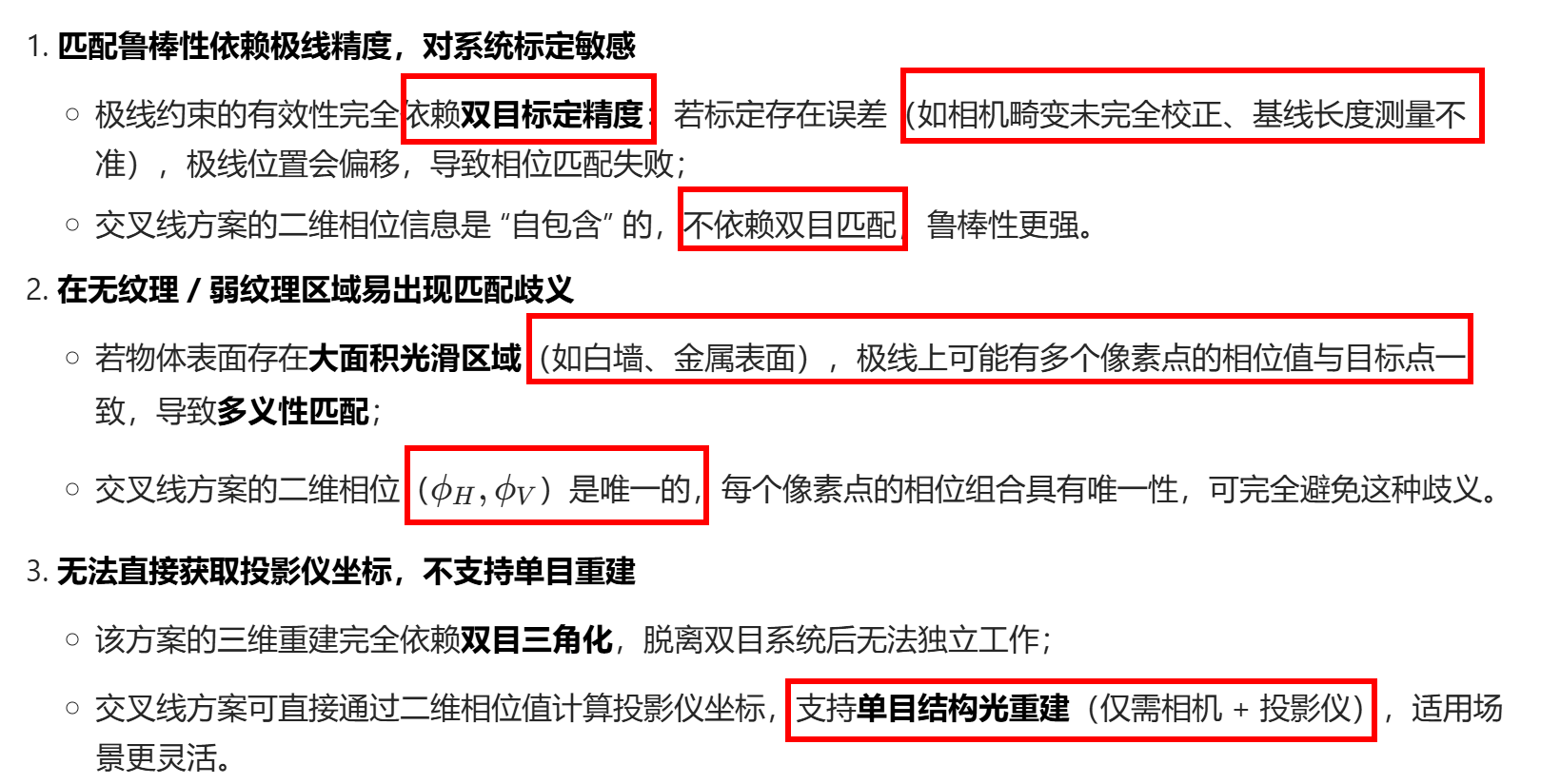
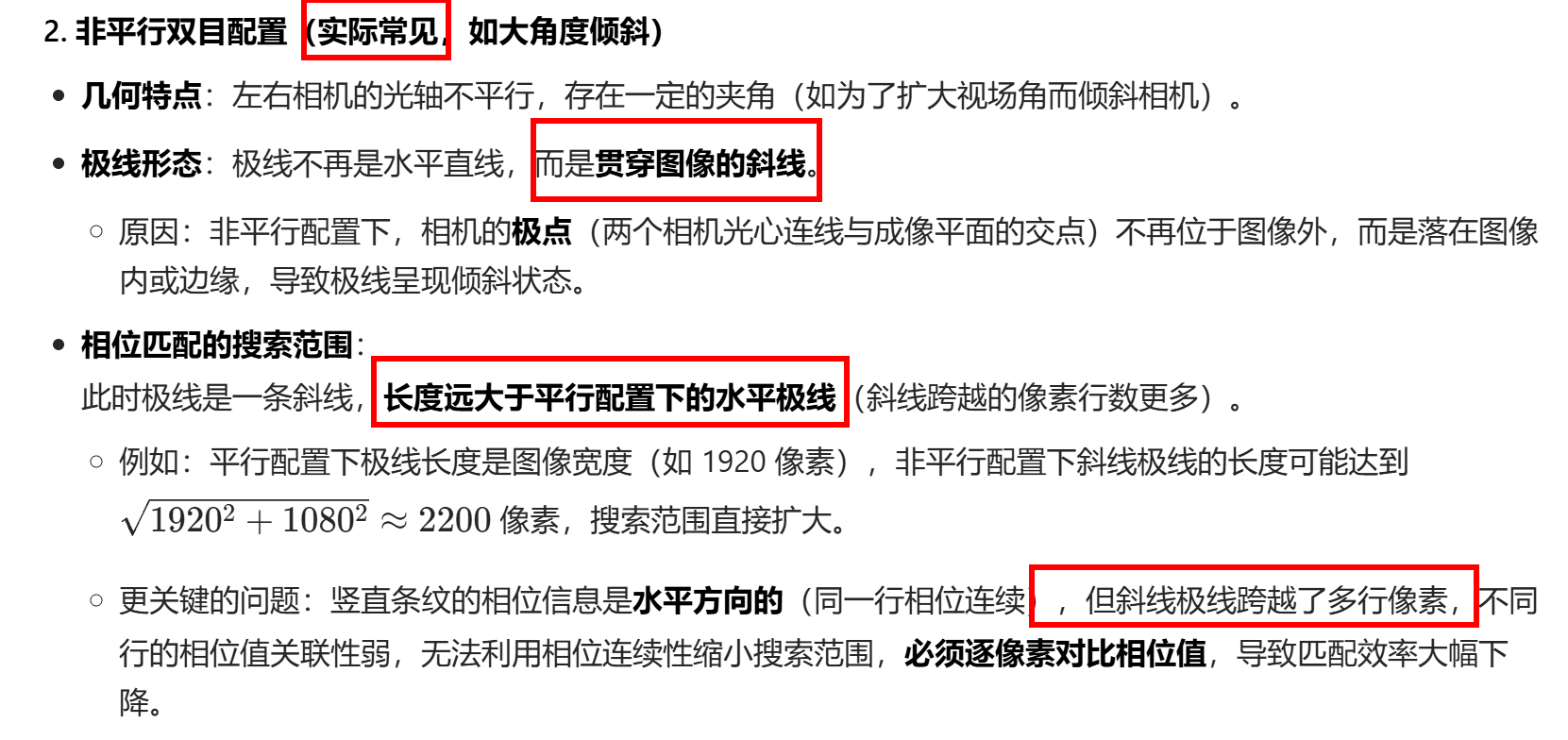
- 对极线方向敏感,非平行双目配置下效率下降
- 当双目相机为非平行配置(如大角度倾斜)时,极线不再是水平直线,而是斜线,此时极线上的相位搜索范围变大,匹配效率降低;
- 交叉线方案不受相机配置影响,相位解算始终是二维的。
四、 两种方案的适用场景对比
| 方案 | 核心依赖 | 优势 | 适用场景 |
|---|---|---|---|
| 竖直条纹+双目极线约束 | 双目标定精度+相位匹配 | 投影次数少、重建速度快 | 动态场景、对效率要求高的工业检测、双目系统已标定的场景 |
| 横竖交叉线 | 二维相位唯一性 | 匹配鲁棒性强、支持单目重建、对标定误差容忍度高 | 高精度静态重建、复杂纹理物体扫描、单目结构光系统 |
五、 总结
你的观点完全正确——在双目系统中,极线约束确实可以“替代”水平条纹的作用,用一维竖直条纹实现三维重建。这是一种“以立体匹配约束弥补相位维度不足”的折中方案,在效率和成本上有优势。
但从工程实践角度看,交叉线方案的鲁棒性和通用性更优,尤其是在高精度重建或复杂场景下。实际应用中,可根据需求选择:
- 追求效率:竖直条纹+双目极线约束;
- 追求精度/鲁棒性:横竖交叉线(单目/双目均可)。
备注:对极线方向敏感,非平行双目配置下效率下降?
要理解非平行双目配置下极线约束效率下降以及交叉线方案的鲁棒性优势,我们可以从 极线几何的本质、不同相机配置下极线的形态变化、相位匹配的搜索逻辑 三个层面拆解,结合直观的几何对比和算法效率分析。
一、 前置知识:双目极线约束的核心作用
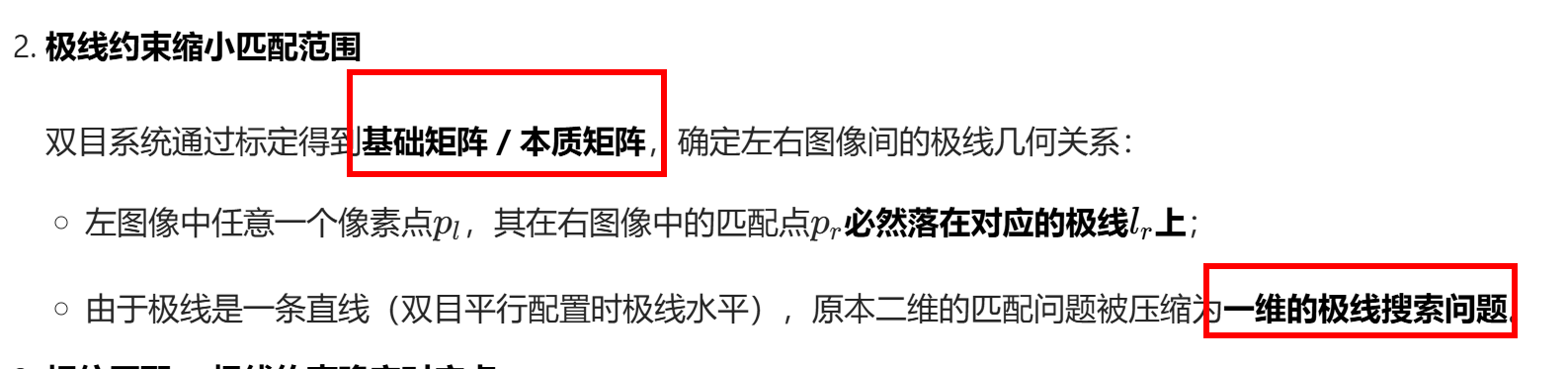
在双目立体匹配中,极线约束的本质是 将二维图像的像素匹配问题,压缩为一维极线的搜索问题,核心目的是减少匹配的计算量:
- 对左相机的任意像素点 $p_l$,其在右相机中的对应点 $p_r$ 必然落在一条固定的直线(极线 $l_r$)上,而非整个右图像。
- 因此,匹配时只需在极线上遍历像素,无需遍历整张图,大幅降低计算复杂度。
而匹配的效率,直接取决于极线的长度(搜索范围):极线越长,需要对比的像素越多,效率越低;极线越短,效率越高。
二、 平行双目 vs 非平行双目:极线形态与搜索范围的差异
双目相机的配置分为 平行配置 和 非平行配置,两者的极线形态截然不同,这是效率差异的根源。
1. 平行双目配置(理想情况)
- 几何特点:左右相机的光轴完全平行,成像平面共面且行对齐。
- 极线形态:极线是水平直线,且与图像的扫描行重合。
- 例如:左图像第 $y$ 行的像素,其在右图像的极线就是右图像的第 $y$ 行。
- 相位匹配的搜索范围:
对于仅投影竖直条纹的方案,相位信息是水平方向的(同一行内的相位值连续)。此时极线(水平行)的长度等于图像的宽度,但由于相位的周期性,实际搜索范围可进一步缩小(仅需在相位相似的局部区域搜索)。- 核心优势:极线方向与相位变化方向一致,搜索范围小且直观。
三、 为什么交叉线方案不受相机配置影响?
交叉线方案(横竖条纹组合)的核心是 直接获取像素的二维相位信息,其相位解算完全不依赖双目极线约束,因此不受相机配置的影响。具体逻辑如下:
-
相位信息的二维唯一性
交叉线投影后,每个像素点同时拥有 水平方向相位 $\phi_H$(来自竖直条纹) 和 竖直方向相位 $\phi_V$(来自水平条纹),形成一个二维相位特征向量 $(\phi_H,\phi_V)$。- 这个向量是全局唯一的,即不同像素点的 $(\phi_H,\phi_V)$ 组合几乎不会重复。
-
相位-坐标映射的独立性
交叉线方案的核心是 将二维相位值直接映射为投影仪的二维坐标(如你之前的代码逻辑),再通过投影仪-相机的单应性矩阵,结合相机内参计算三维坐标。- 整个过程不需要双目匹配,自然不依赖极线约束;
- 无论双目相机是平行还是非平行配置,相位解算都是基于单张图像的二维相位提取,与相机相对位置无关。
-
即使用于双目系统,匹配效率也更高
若交叉线方案用于双目系统,匹配时直接对比 二维相位特征向量,而非一维相位值:- 左图像像素的 $(\phi_H,\phi_V)$ 与右图像像素的 $(\phi_H,\phi_V)$ 直接匹配,无需依赖极线约束;
- 即使使用极线约束缩小范围,由于二维特征的唯一性,匹配时几乎不会出现歧义,效率远高于一维相位的极线搜索。
四、 直观对比:两种方案的效率差异
| 方案 | 平行双目配置 | 非平行双目配置 | 核心影响因素 |
|---|---|---|---|
| 竖直条纹+极线约束 | 效率高(极线水平,搜索范围小) | 效率低(极线倾斜,搜索范围大,相位关联性弱) | 极线长度、相位方向与极线方向的一致性 |
| 横竖交叉线 | 效率高(二维相位唯一,无需依赖极线) | 效率高(相位解算与相机配置无关) | 二维相位提取的精度 |
五、 总结:核心结论
- “对极线方向敏感”的本质:
竖直条纹方案的匹配效率完全依赖极线的长度和方向——平行双目极线短且与相位方向一致,效率高;非平行双目极线长且与相位方向交叉,效率低。

- 工程实践建议:
- 若使用平行双目系统,且追求低成本、快投影(少条纹数),可选择竖直条纹+极线约束;
- 若使用非平行双目系统,或追求高精度、复杂场景的鲁棒性,优先选择横竖交叉线方案。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号