

单目激光三角测量是怎么形成三角的
单目激光三角测量的几何原理与示意图
单目激光三角测量的核心是通过激光平面和相机视线的交点(即“三角”)计算物体表面的三维坐标。以下是详细的几何解释和示意图:
1. 三角测量的几何构成
单目激光系统由三个关键元素构成“三角”关系:
- 相机光心(O):相机的光学中心,坐标系原点。
- 激光平面:激光器发射的激光线在空间中形成的平面(已知方程 ax + by + cz + d = 0)。
- 物体表面点(P):激光线与物体表面的交点,即待测的三维点。
这三个元素形成一个空间三角形,通过解算该三角形确定点 ( P ) 的坐标。
2. 几何示意图
Laser Plane (ax + by + cz + d = 0)
*
/ \
/ \
/ \
/ \
/ \
/ \
/ \
/ \
/ \
/ \
/ \
/ \
/ \
/ \
/ \
*-------------------------------*
Camera Center (O) Object Surface (P)
- 红色虚线:激光平面(由激光器发射的线激光形成)。
- 蓝色虚线:相机视线(从相机光心 ( O ) 到像素点 ( (u,v) ) 的射线)。
- 交点 ( P ):激光平面与相机视线的交点,即物体表面的三维点。
3. 三角测量步骤
步骤1:激光平面约束
激光器发射的激光在空间中形成一个平面,其方程在相机坐标系下已知:
aX_c + bY_c + cZ_c + d = 0
任何被激光照射的点 ( P ) 必须满足该方程。
步骤2:相机视线反投影
相机捕获激光线图像,提取像素坐标 ( (u,v) ),反投影到相机坐标系下的射线:
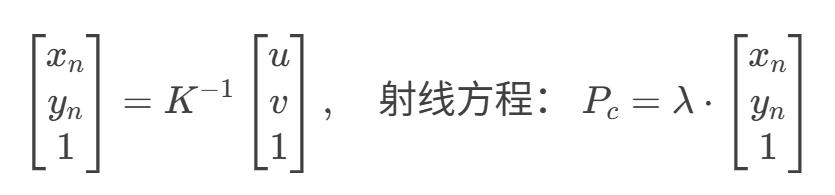
(( \lambda ) 为深度参数,( K ) 是相机内参矩阵)。
步骤3:求解交点(三角测量)
将射线方程代入激光平面方程,解出 ( \lambda ):

最终三维坐标:
4. 为什么叫“三角测量”?
- 三角形构成:
相机光心 ( O )、激光发射器光学中心、物体点 ( P ) 构成一个空间三角形。
(注:若激光器与相机光心重合,则退化为共线关系,实际系统中两者通常有基线距离。) - 几何解算:
已知激光平面(约束 ( P ) 的位置)和相机视线(约束 ( P ) 的方向),通过解算三角形确定 ( P ) 的坐标。
5. 关键点总结
- 激光平面:提供额外的几何约束,将无限可能的射线缩小到唯一交点。
- 相机视线:将2D像素点反投影到3D空间中的射线。
- 三角关系:激光平面 + 相机视线 + 物体表面 = 可解的三维坐标。
6. 实际应用示例
- 工业检测:测量零件表面高度(如焊缝、划痕)。
- 三维扫描:移动激光线扫描物体轮廓。
- 机器人导航:检测地面或障碍物距离。
通过这种三角测量方法,单目相机+线激光可实现低成本、高精度的三维测量!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号