

相机坐标系下的3D点 ( X , Y , Z ) 转换到像素坐标系 ( u , v ) 需要使用相机的内参矩阵,怎么计算?
1. 相机内参矩阵
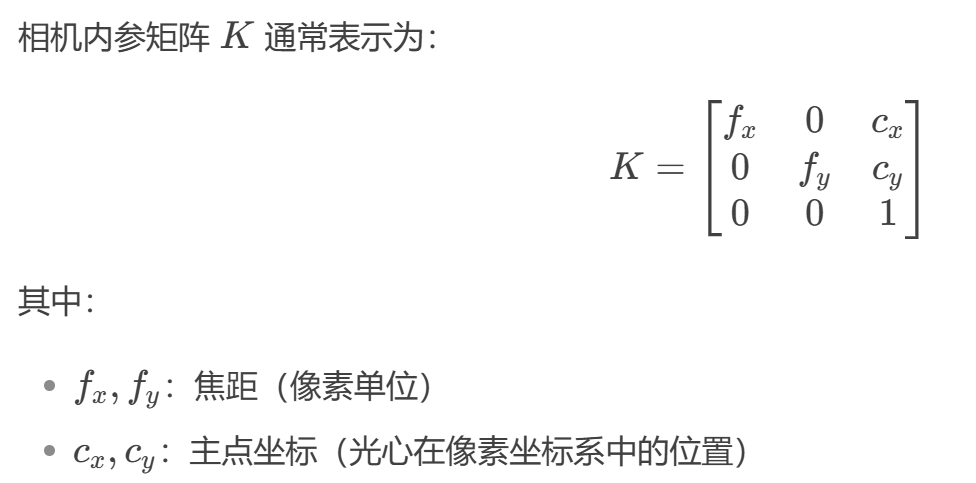
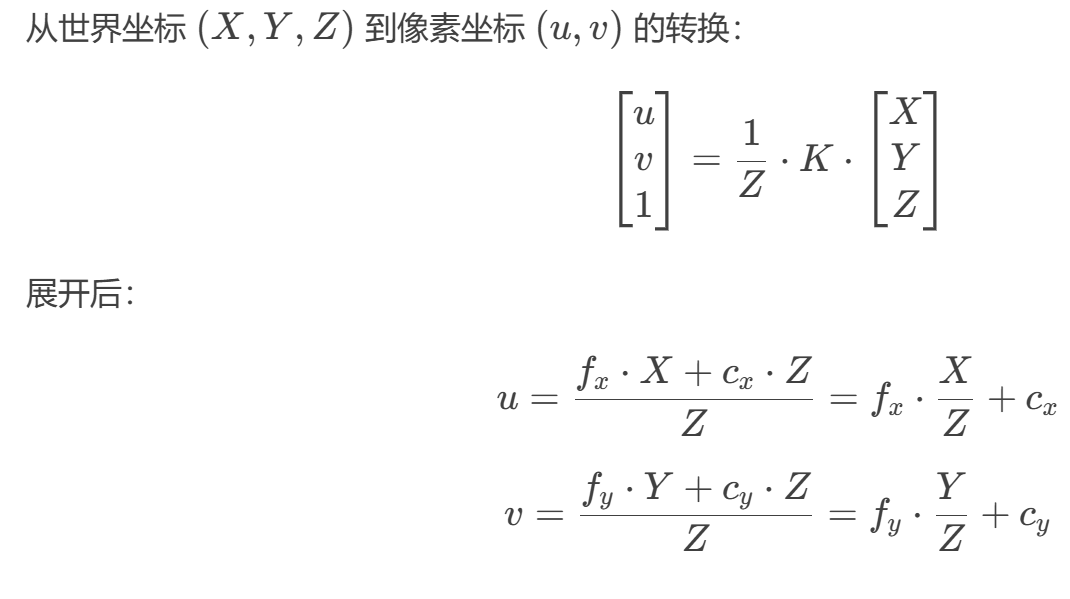
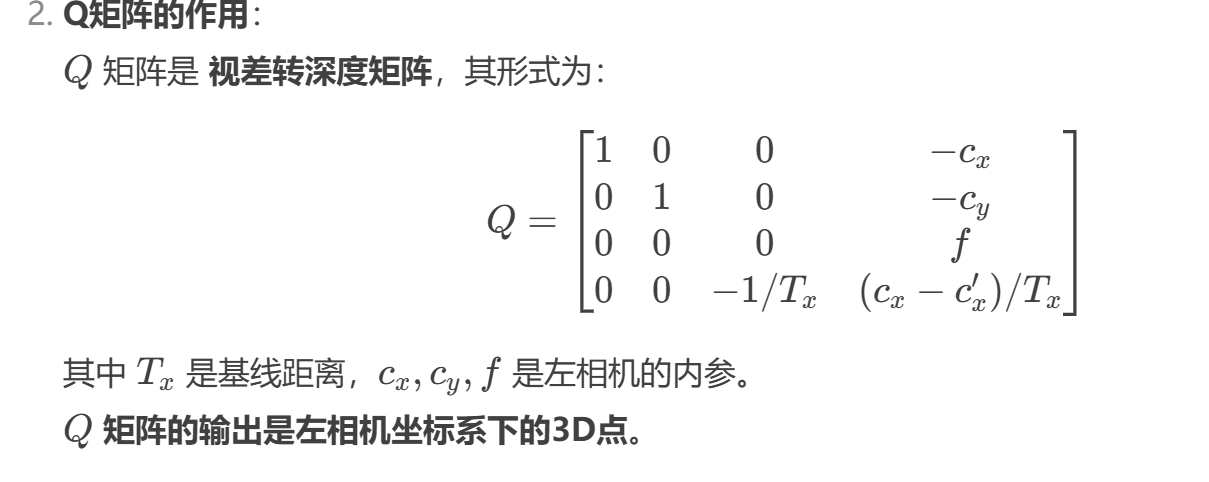
2. 坐标转换公式
``
// 假设已知相机内参
float fx = ...; // 焦距x (像素)
float fy = ...; // 焦距y (像素)
float cx = ...; // 主点x (像素)
float cy = ...; // 主点y (像素)
if (x < width && y < height) {
int idx = y * width + x;
float d = disparity[idx];
if (d == 0.0f) return;
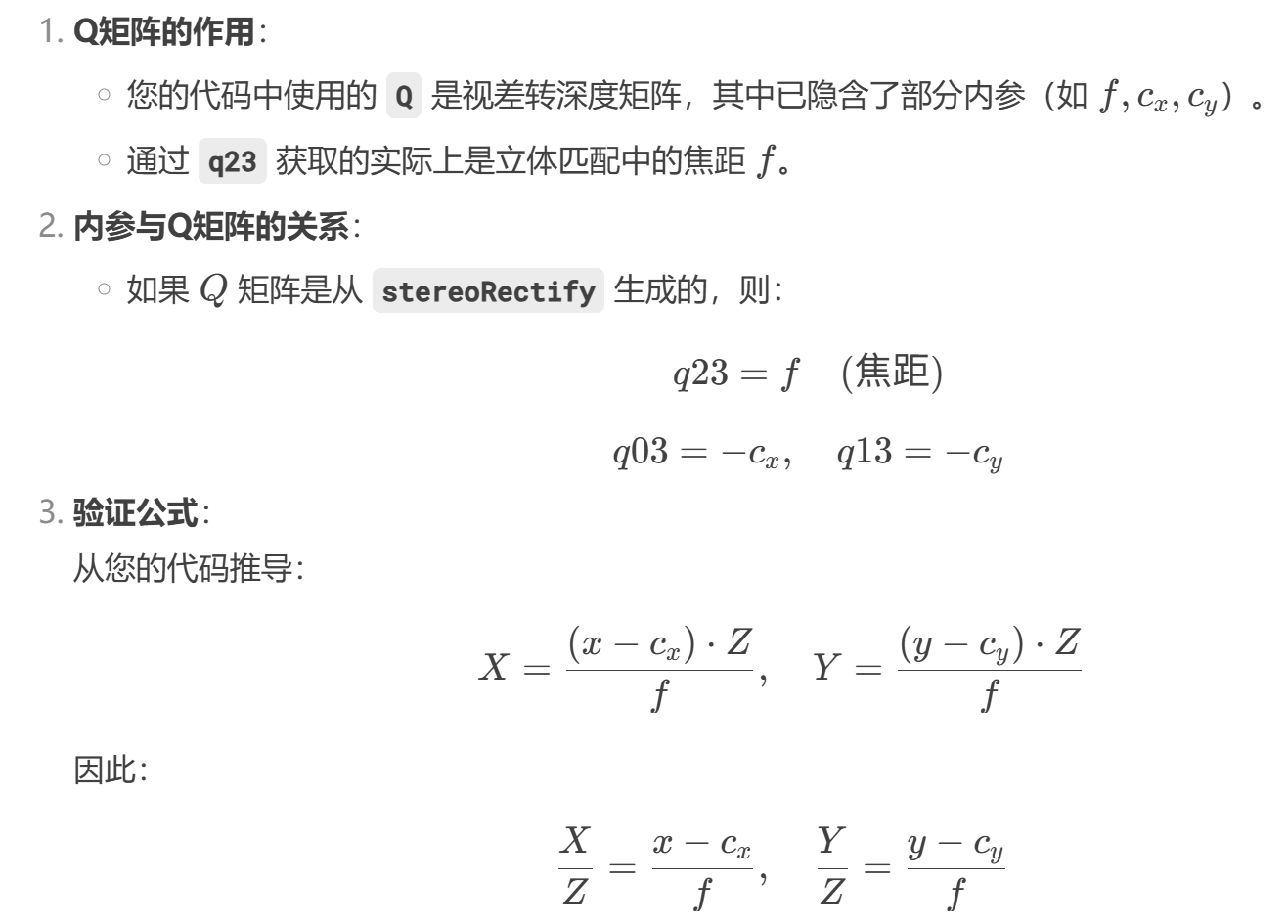
const float q03 = Q[3]; // Q[0][3] = -cx
const float q13 = Q[7]; // Q[1][3] = -cy
const float q23 = Q[11]; // Q[2][3] = f
const float q32 = Q[14]; // Q[3][2] = -1/Tx
const float q33 = Q[15]; // Q[3][3] = (cx-cx')/Tx
float W = q32 * d + q33;
if (fabsf(W) > 1e-6f) {
float Z = q23 / W;
if (isnan(Z) || Z >= maxZ || Z <= minZ || Z == 0.0f) return;
float X = (x + q03) * Z / q23; // X = (x - cx) * Z / f
float Y = (y + q13) * Z / q23; // Y = (y - cy) * Z / f
// 转换为像素坐标
float u_pixel = fx * (X / Z) + cx;
float v_pixel = fy * (Y / Z) + cy;
point_cloud[idx] = {X, Y, Z};
pixel_coords[idx] = {u_pixel, v_pixel}; // 存储像素坐标
}
}
``
3. 关键点说明
畸变校正:
如果相机镜头存在畸变,需先对 (u,v) 进行去畸变处理:
// 假设已计算去畸变映射表 (undistortMap)
cv::remap(raw_pixel_coords, undistorted_coords, undistortMap, cv::INTER_LINEAR);
坐标系一致性:
确保 Q矩阵中的 cx cy与内参矩阵 K 的定义一致。
世界坐标 (X,Y,Z) 到像素坐标 (u,v) 的转换为什么要1/Z?
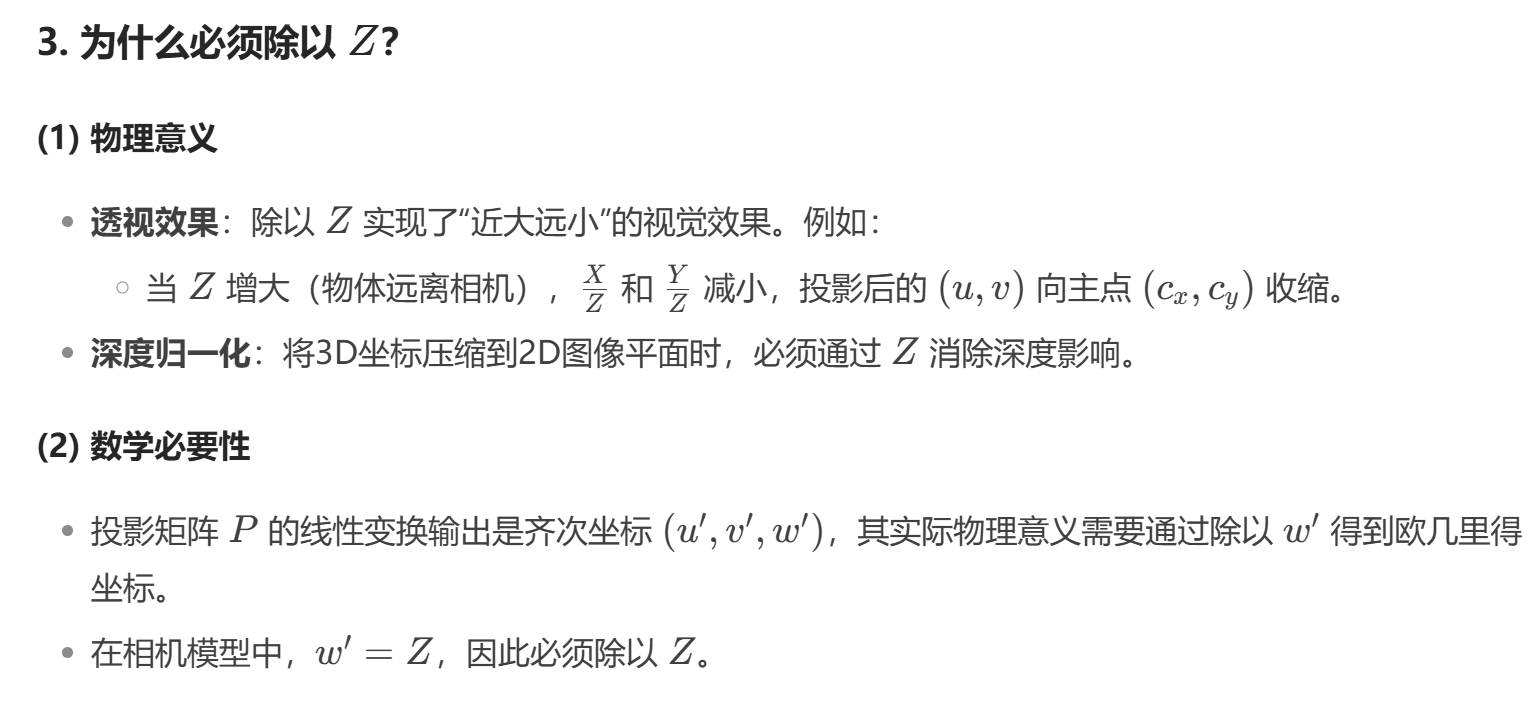
(X,Y,Z) 到像素坐标系 (u,v) 的转换过程中,除以 Z(即深度值)是 透视投影(Perspective Projection) 的核心数学操作,其本质原因是 透视除法(Perspective Division)。
1. 透视投影的几何原理
相机成像遵循 小孔成像模型(Pinhole Camera Model),其核心特点是:近大远小:物体离相机越远,成像越小。
深度依赖性:投影后的坐标与深度 Z成反比。
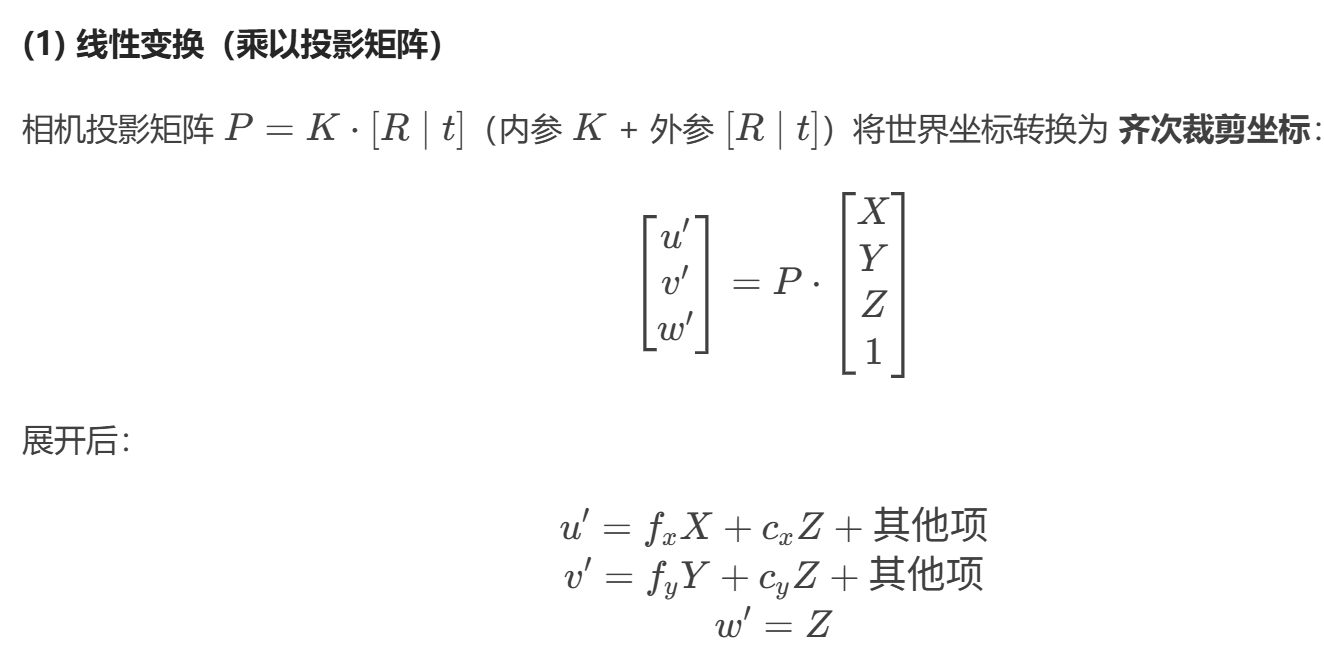
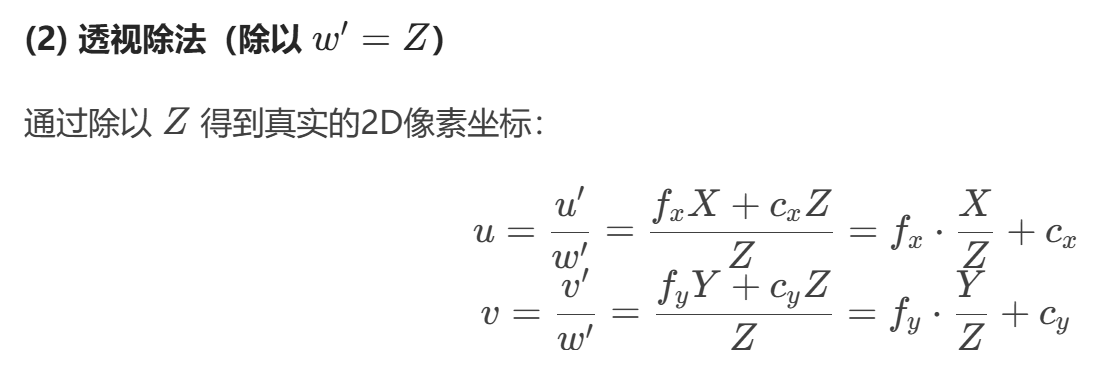
数学上,3D点 (X,Y,Z) 到2D像素 (u,v) 的转换是一个非线性过程,需要通过齐次坐标和透视除法实现。
2. 齐次坐标与投影矩阵
float X = (x + q03) * Z / q23; // 实际是 X = (x - c_x) * Z / f
float Y = (y + q13) * Z / q23; // Y = (y - c_y) * Z / f
// 转换为像素坐标时,需要除以 Z:
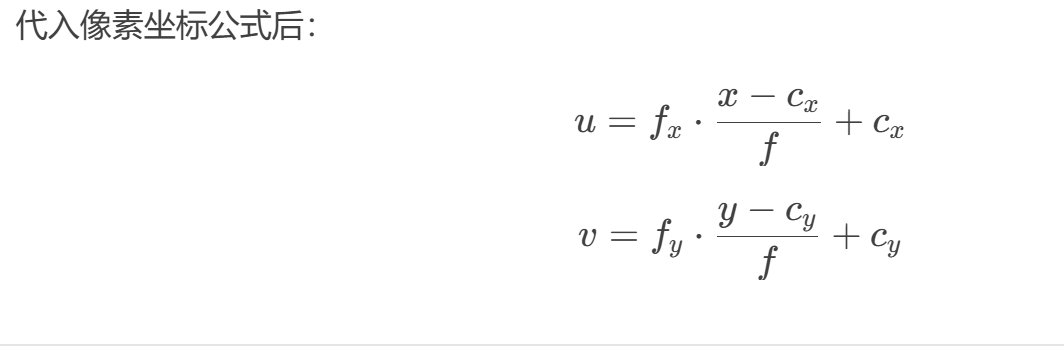
float u_pixel = fx * (X / Z) + cx; // = fx * (x - cx)/f + cx
float v_pixel = fy * (Y / Z) + cy; // = fy * (y - cy)/f + cy
注意:
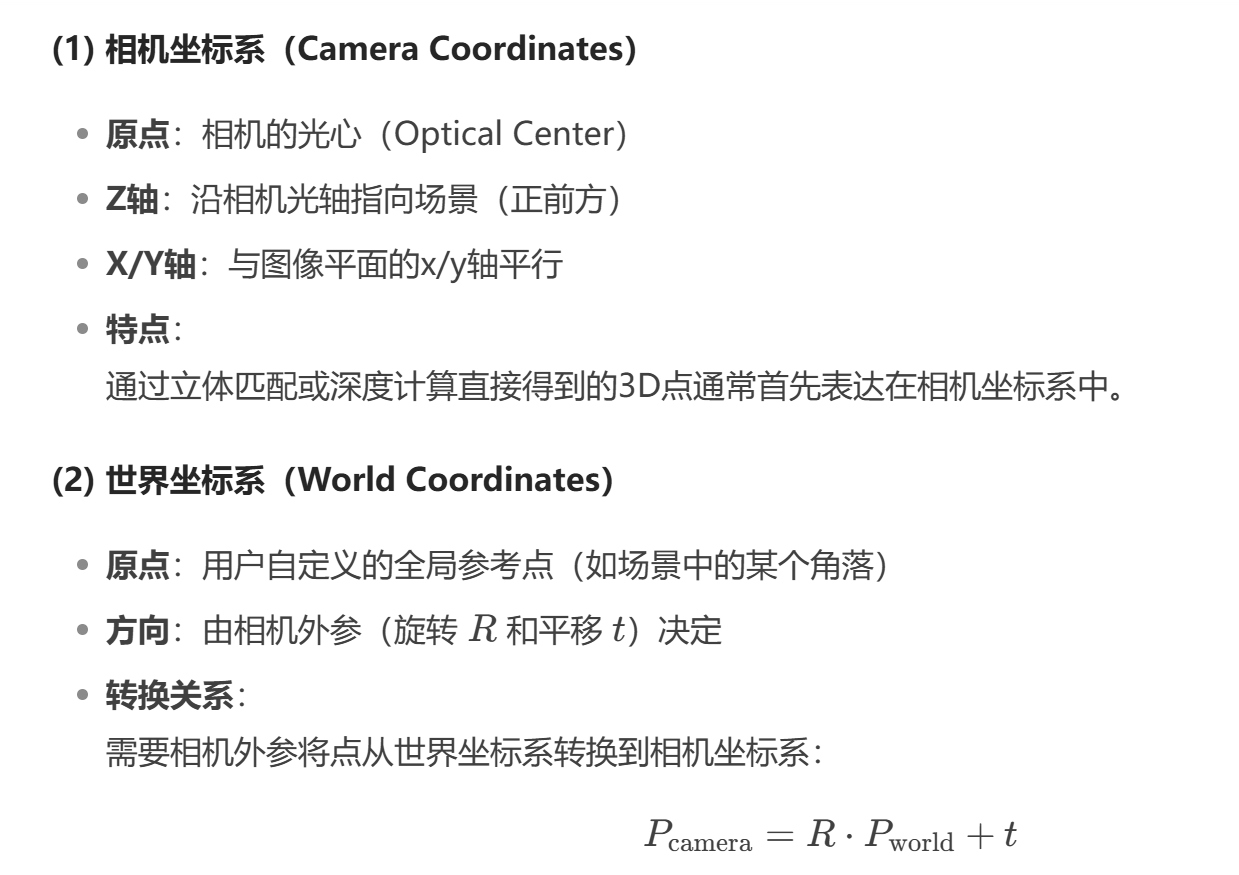
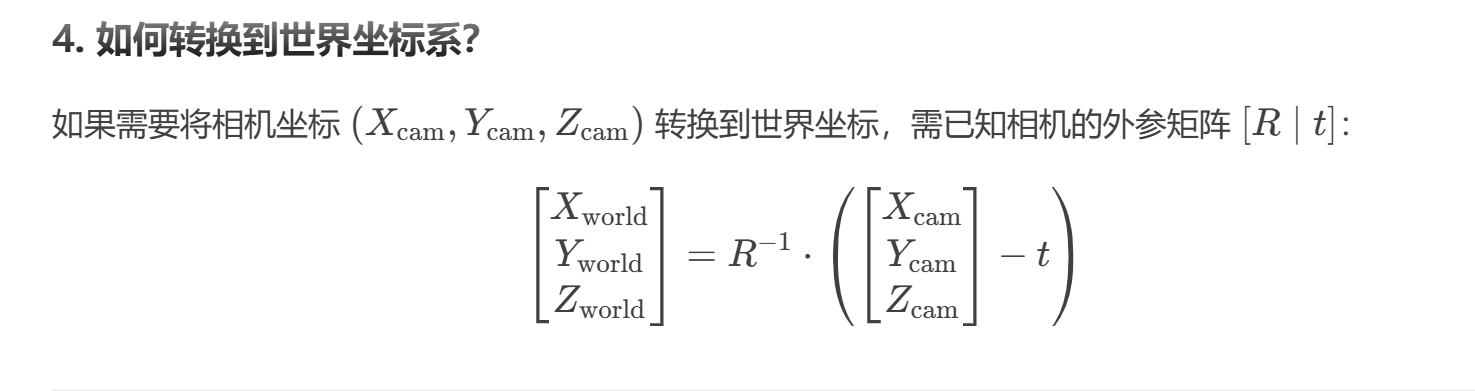
通过 Q矩阵 和 视差图 计算得到的 (X,Y,Z) 是 相机坐标系(Camera Coordinate System) 下的坐标,而非世界坐标系(World Coordinate System)
代码:
float X = (x + q03) * Z / q23; // 实际是 X = (x - cx) * Z / f
float Y = (y + q13) * Z / q23; // Y = (y - cy) * Z / f
X 和 Y 的计算基于 像素坐标 (x,y) 和 相机内参(隐含在 Q 矩阵中)
公式本质是 反向投影(Back-projection),将像素位置和深度转换为相机坐标系下的3D点。
直接使用 像素坐标
(x,y) 和 焦距 f(即 q23),这是相机坐标系的标准计算方式。
未涉及世界坐标系的旋转 R 或平移 t

 浙公网安备 33010602011771号
浙公网安备 33010602011771号