标定的Q矩阵的参数意义
在结构光三维重建或立体视觉系统中,Q矩阵(重投影矩阵,Reprojection Matrix)是一个关键的 4×4 矩阵,用于将 二维图像坐标 + 视差(disparity) 转换为 三维世界坐标。它由相机标定(Stereo Rectification)过程生成,包含了双目系统的几何关系和相机参数。以下是 Q 矩阵的详细解析:
Q 矩阵的结构
通常形式为:
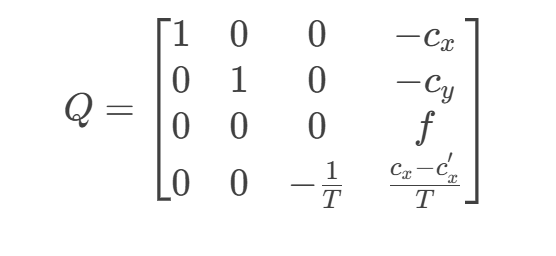
其中:
- ( (c_x, c_y) ):左相机主点(principal point)的像素坐标。
- ( c'_x ):右相机主点的 x 坐标(假设立体校正后仅 x 方向有视差)。
- ( f ):校正后相机的等效焦距(像素单位)。
- ( T ):双目系统的基线长度(baseline,即左右相机光心的水平距离,单位与焦距一致)。
Q 矩阵的参数意义
1. 前三行:坐标变换关系
- 第1行
[1, 0, 0, -c_x]
将像素坐标的 ( x ) 方向平移至以主点 ( c_x ) 为原点。 - 第2行
[0, 1, 0, -c_y]
将像素坐标的 ( y ) 方向平移至以主点 ( c_y ) 为原点。 - 第3行
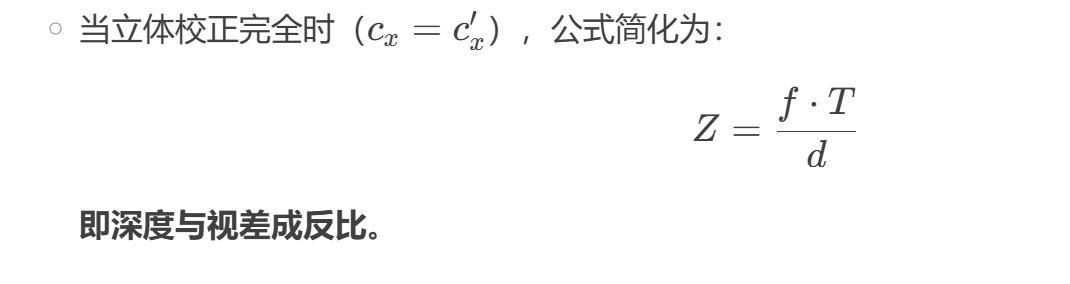
[0, 0, 0, f]
与视差 ( d ) 结合,计算深度 ( Z )(见下文公式)。
2. 第4行:深度计算核心
[0, 0, -\frac{1}{T}, \frac{c_x - c'_x}{T}]
这是深度计算的关键参数:- ( -\frac{1}{T} ):基线长度 T 的倒数,决定深度 Z的缩放比例。
- ( \frac{c_x - c'_x}{T} ):校正后主点偏移的补偿项(立体校正后 c_x ≈ c'_x,此项通常接近 0)。
如何使用 Q 矩阵计算三维坐标?
给定左图像中的像素坐标 ( (x, y) ) 和视差 ( d ),三维坐标 ( (X, Y, Z) ) 的计算步骤如下:

Q 矩阵的实际意义
- 视差转深度:
( Q ) 矩阵封装了 基线 ( T ) 和 焦距 ( f ) 的关系,直接关联视差与物理深度。 - 坐标系统一:
将左右相机的图像坐标统一转换到左相机坐标系下的三维坐标。 - 校正后的简化计算:
立体校正(Rectification)后,视差仅存在于水平方向,( Q ) 矩阵使得三维重建计算高效。
Q 矩阵的来源
- 通过 立体标定(Stereo Calibration) 和 立体校正(Stereo Rectification) 生成:
- 标定获取左右相机的内参(( K_{\text{left}}, K_{\text{right}} ))、外参(旋转 ( R )、平移 ( T ))。
- 校正过程计算左右图像的投影矩阵 ( P_{\text{left}}, P_{\text{right}} ) 和视差矩阵 ( Q )。
注意事项
- 单位一致性:
- ( f ) 和 ( T ) 需使用相同单位(通常为像素或毫米)。
- 视差 ( d ) 的符号:
- 根据库的实现不同,视差可能是 ( d = x_{\text{left}} - x_{\text{right}} ) 或其相反数,需与 ( Q ) 矩阵匹配。
- OpenCV 中的 Q 矩阵:
- 通过
stereoRectify()函数计算,可直接用于reprojectImageTo3D()。
- 通过
示例(OpenCV 代码片段)
// 立体标定后获取 Q 矩阵
Mat Q;
stereoRectify(
cameraMatrix1, distCoeffs1, // 左相机内参和畸变
cameraMatrix2, distCoeffs2, // 右相机内参和畸变
imageSize, R, T, // 旋转和平移
R1, R2, P1, P2, Q, // 输出校正参数和 Q 矩阵
CALIB_ZERO_DISPARITY
);
// 使用 Q 矩阵将视差图转换为三维点云
Mat disparity; // 输入视差图(CV_16S 或 CV_32F)
Mat pointCloud; // 输出三维坐标(CV_32FC3)
reprojectImageTo3D(disparity, pointCloud, Q);
总结
- Q 矩阵 是连接 二维图像视差 与 三维世界坐标 的桥梁。
- 核心参数:焦距 ( f ) 和 基线 ( T ),决定深度计算的尺度。
- 应用场景:结构光三维重建、立体视觉、SLAM 等。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号