
如何理解图像处理中的Otsu's 二值化算法(大津算法)Python编程实践
本教程代码已开源到github: https://github.com/varyshare/easy_slam_tutorial/tree/master/Otsu’s_Method_algorithm
Otsu’s 二值化(大津算法)
二值化是什么?有什么用?
PDF扫描成电子版,文字识别,车牌识别等等图像处理场合均需要使用“二值化”操作。我们知道图像是一个矩阵组成,矩阵的元素是一个数字,这个数字是当前像素点对应的颜色(即像素值)。而图片的二值化操作就是将所有像素值变成要么是0要么是1.一般二值化怎么做的呢?答:“设置一个数字d,只要像素值大于这个阈值d那就设置为1,小于这个阈值d那就设置为0。当然也可以大于这个阈值设置为0,小于设置为1”。但是这个阈值怎么找到的呢?计算出一个合适的阈值出来这就是 Otsu’s 二值化(大津算法)要做的事情。
下面是一幅图片对应的像素值矩阵(图片就是矩阵):
假设现在我通过Otsu’s 二值化(大津算法)计算出上面那个图片二值化的最优阈值是39.
那么上面那个图片就会被二值化为:
下面我们实验下。
实验1. 造一个数据
做图像处理必备技能就是人工制造一个纯净的图片检验算法正确性
import numpy as np
import cv2
import matplotlib.pyplot as plt
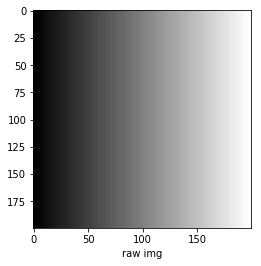
######我们先制造一个200x200的图片用于二值化实验#######
def get_test_img():
img_mat = np.zeros((200,200),dtype=np.uint8)# 记得设置成整数,不然opencv会将大于1的浮点数全显示成白色
for row in range(200):
for col in range(200):
img_mat[row][col] = col
return img_mat
img_mat = get_test_img()
plt.imshow(img_mat,cmap='gray')# 显示图片
plt.xlabel("raw img")
如下所示:
2. 手工设置阈值进行二值化实验
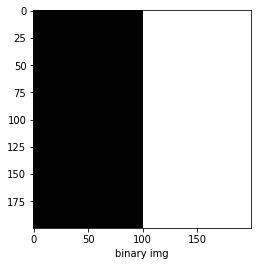
##########我们设置二值化的阈值为100,将像素值小于100设置为0 (黑色)大于100设置为1 (白色)#######
img_mat = get_test_img() # 注意这是实验1中那个函数
img_mat[img_mat<=100]=0
img_mat[img_mat>100]=1
plt.imshow(img_mat,cmap='gray')# 显示图片
plt.xlabel("binary img")
我们将实验1中的图片二值化为下面这张图。
Otsu’s 二值化(大津算法)是怎么根据一张图片计算出它二值化的最优阈值的?
它就是统计各个像素值的出现的次数,然后遍历各种阈值(总共有256种可能的选择),然后让被划分的那两类的像素值的方差的加权和最小。加权和的权重就是对应类中像素值之和。这个方差就用统计学中的方差计算公式即可。
我总结下Otsu伪代码:
统计各个像素值的出现次数
while(遍历各种阈值的取值(0到255种可能))
{
1. 根据当前阈值对图像所有出现的像素值进行分类。
大于阈值的像素值分为一个类A,小于阈值则分为另外一个类B。(到时候你可以让A类中所有像素值为1,B类所有像素值为0。也可以让类A所有像素值为0.这都是可以你自己定,所以我就用A,B代替了。)
2. 计算类A的所有像素值的方差SA,计算类B中所有像素值的方差SB
3. 计算类A中所有像素值之和IA,计算类B中所有像素点的像素值的像素值之和IB
4. 计算当前阈值划分下两个类的像素值方差的加权和S=IA*SA+SB*IB
5. 像素值方差的加权和S是否是目前遍历到的阈值划分下最小的那一个值?如果是那就保存当前这种取值
}
通过上面操作最终得到最优的阈值d。
while(遍历所有像素点)
{
像素值大于阈值d赋值为1,
像素值小于阈值d赋值为0
}
otsu二值化实验
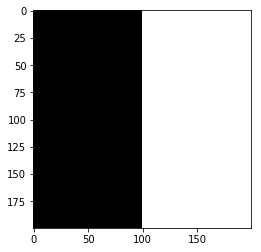
先用cv2中的otsu库函数看看效果
# 调用cv2中的otsu库
img_mat = get_test_img() # 这是实验1中的那个函数
img_mat = img_mat.astype(np.uint8)
threshold,img_mat = cv2.threshold(img_mat,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
print(threshold)
plt.imshow(img_mat,cmap='gray')
再我们自己造一个轮子Python代码从零实现otsu二值化算法
import numpy as np
# 自己造轮子写otsu二值化算法
img_mat = get_test_img()
img_mat = img_mat.astype(np.uint8)
##############统计各个像素值的出现次数##############
img_mat_vector = img_mat.flatten()
pixel_counter = np.zeros(256)
for pixel_value in img_mat_vector:
pixel_counter[pixel_value] += 1
############遍历阈值的各种可能的取值############
min_variance = np.inf
best_threshold = 0
pixel_value = np.arange(256)
for threshold in range(256):
# 1. 根据阈值对各个像素值进行划分
pixel_value_A = pixel_value[0:threshold]
pixel_value_B = pixel_value[threshold:]
# 2. 计算类A的所有像素值的方差SA,计算类B中所有像素值的方差SB
totalPixelNum_A = np.sum(pixel_counter[pixel_value_A])
totalPixelNum_B = np.sum(pixel_counter[pixel_value_B])
Probability_pixelvalue_A = pixel_counter[pixel_value_A]/totalPixelNum_A
Probability_pixelvalue_B = pixel_counter[pixel_value_B]/totalPixelNum_B
meanPixelValue_A = np.sum(pixel_value_A * Probability_pixelvalue_A)
meanPixelValue_B = np.sum(pixel_value_B * Probability_pixelvalue_B)
varianceA = np.sum(Probability_pixelvalue_A * (pixel_value_A-meanPixelValue_A)**2)
varianceB = np.sum(Probability_pixelvalue_B * (pixel_value_B-meanPixelValue_B)**2)
current_total_variance = totalPixelNum_A*varianceA + totalPixelNum_B*varianceB
if current_total_variance<min_variance:
min_variance = current_total_variance
best_threshold = threshold
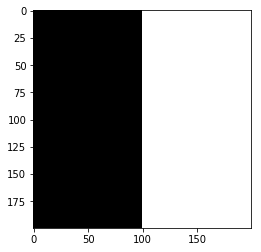
print("最优像素值的阈值为",best_threshold)
#######根据获得的阈值对图像各个像素像素点进行二值化######
img_mat[img_mat<best_threshold] = 0
img_mat[img_mat>=best_threshold] = 1
plt.imshow(img_mat,cmap='gray')
最优像素值的阈值为 100
用实际数据实践
# 手写一个otsu二值化
img = cv2.imread('./eight.png',cv2.IMREAD_GRAYSCALE)
# 图片数据我已放到github了
# https://github.com/varyshare/easy_slam_tutorial/tree/master/Otsu's_Method_algorithm
##############统计各个像素值的出现次数##############
img_vector = img.flatten()
pixel_counter = np.zeros(256)
for pixel_value in img_vector:
pixel_counter[pixel_value] += 1
############遍历阈值的各种可能的取值############
min_variance = np.inf
best_threshold = 0
pixel_value = np.arange(256)
for threshold in range(256):
# 1. 根据阈值对各个像素值进行划分
pixel_value_A = pixel_value[0:threshold]
pixel_value_B = pixel_value[threshold:]
# 2. 计算类A的所有像素值的方差SA,计算类B中所有像素值的方差SB
totalPixelNum_A = np.sum(pixel_counter[pixel_value_A])
totalPixelNum_B = np.sum(pixel_counter[pixel_value_B])
Probability_pixelvalue_A = pixel_counter[pixel_value_A]/totalPixelNum_A
Probability_pixelvalue_B = pixel_counter[pixel_value_B]/totalPixelNum_B
meanPixelValue_A = np.sum(pixel_value_A * Probability_pixelvalue_A)
meanPixelValue_B = np.sum(pixel_value_B * Probability_pixelvalue_B)
varianceA = np.sum(Probability_pixelvalue_A * (pixel_value_A-meanPixelValue_A)**2)
varianceB = np.sum(Probability_pixelvalue_B * (pixel_value_B-meanPixelValue_B)**2)
current_total_variance = totalPixelNum_A*varianceA + totalPixelNum_B*varianceB
if current_total_variance<min_variance:
min_variance = current_total_variance
best_threshold = threshold
print("最优像素值的阈值为",best_threshold)
#######根据获得的阈值对图像各个像素像素点进行二值化######
img[img<best_threshold] = 0
img[img>=best_threshold] = 1
plt.imshow(img,cmap='gray')
实验结果如下所示

它的原始图片为:

你的赞和关注是我分享易懂教程的最大动力
今日github项目推荐:
简单易懂的SLAM实践教程Python代码实践
知乎 https://www.zhihu.com/people/yuanmuou/activities

 浙公网安备 33010602011771号
浙公网安备 33010602011771号