解码SPI接口(Flash读写+RFID卡号获取)
硬件SPI实现W25Q128 Flash读写

原理
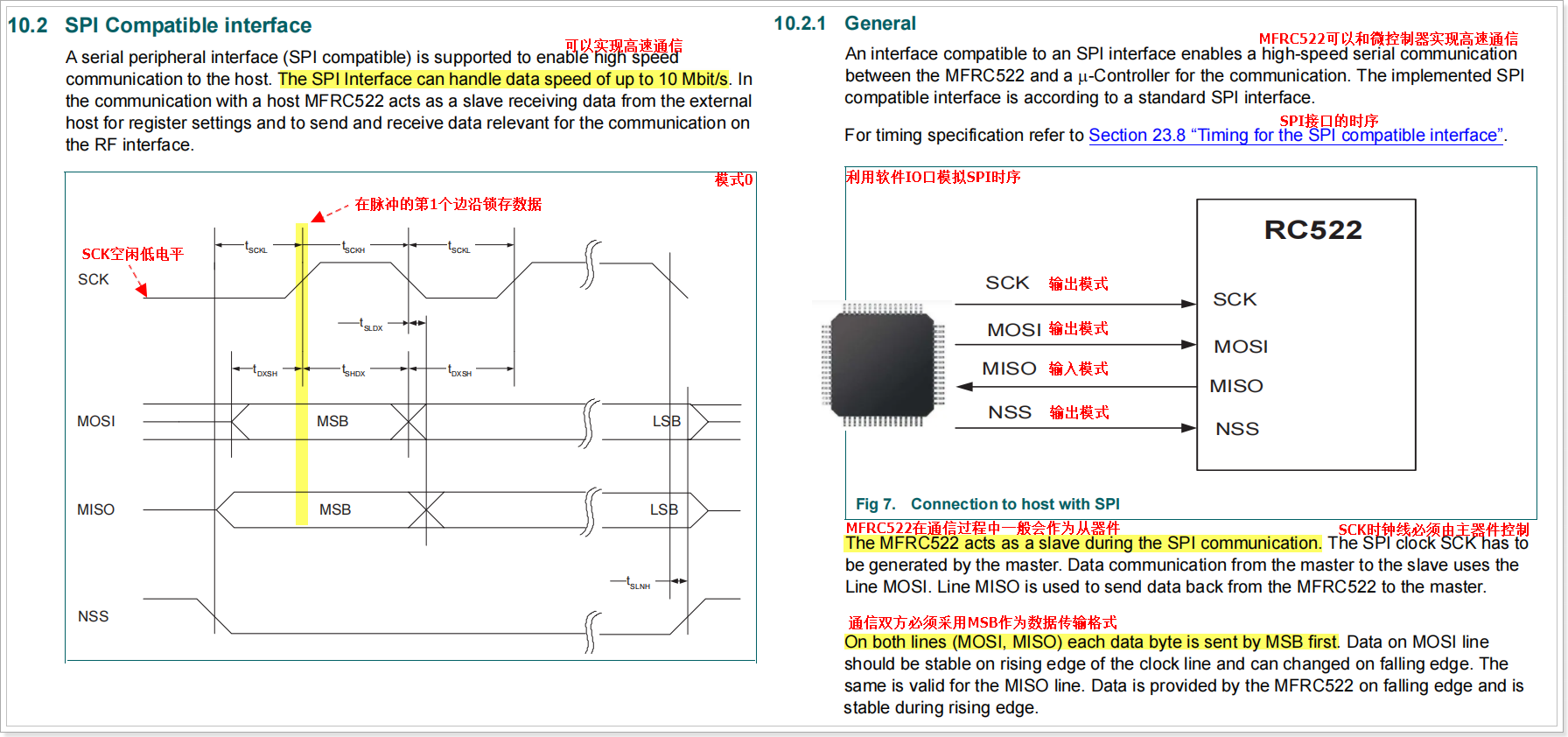
- SPI协议:同步、全双工、高速通信总线,需4根信号线(MOSI主发从收、MISO主收从发、SCK时钟、CS片选);

- 支持4种工作模式,本工程使用模式0(SCK空闲低电平,第一个边沿采样数据)。

| 模式 | CPOL | CPHA | 时钟空闲状态 | 数据采样沿 |
|---|---|---|---|---|
| 0 | 0 | 0 | 低电平 | 奇数边沿(一个脉冲的第一个) |
| 1 | 0 | 1 | 低电平 | 偶数边沿(一个脉冲的第二个) |
| 2 | 1 | 0 | 高电平 | 奇数边沿(一个脉冲的第一个) |
| 3 | 1 | 1 | 高电平 | 偶数边沿(一个脉冲的第二个) |
- W25Q128芯片:128Mbit(16MB)NOR Flash,采用SPI接口;

- 内存按“Page(256Byte)→Sector(16Page=4KB)→Block(16Sector=64KB)”划分;
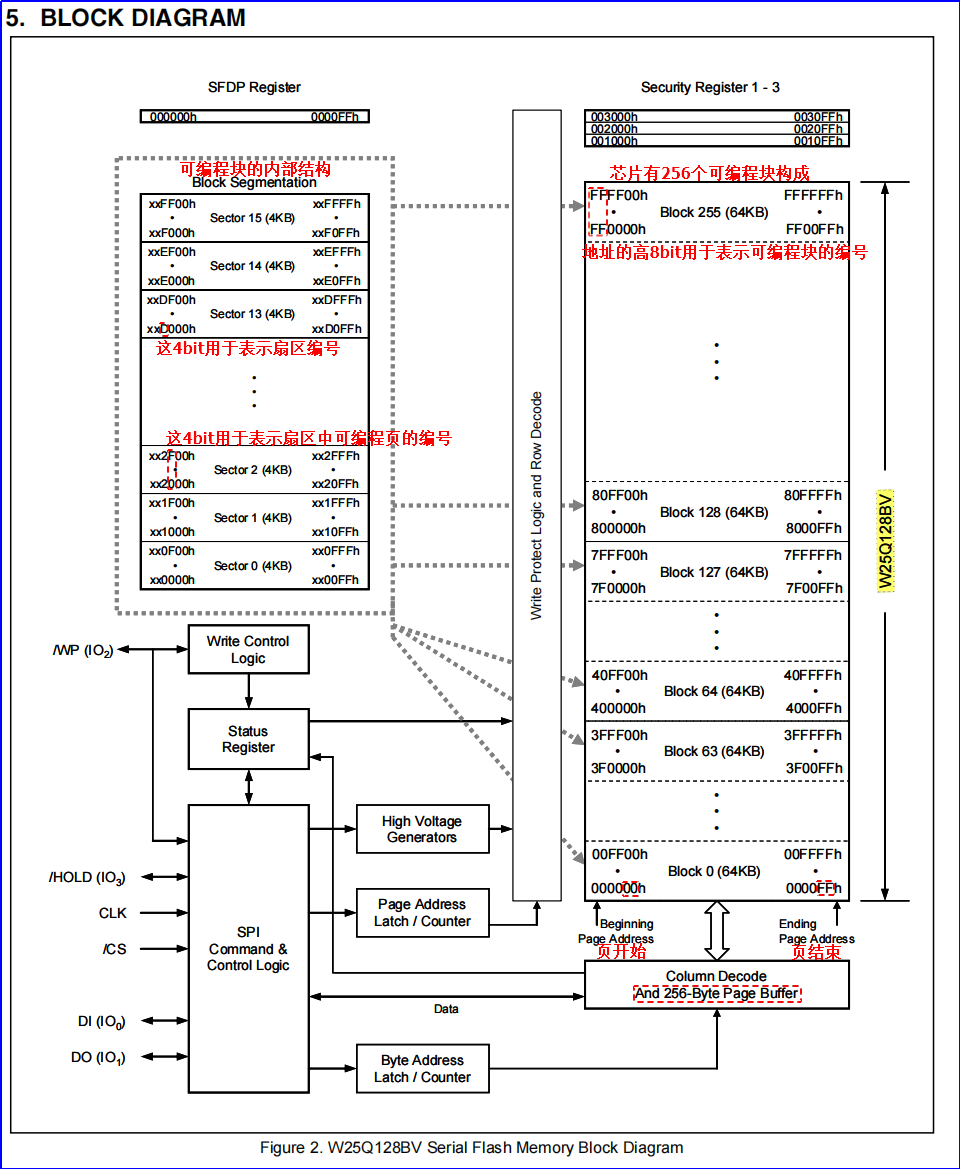
- 擦除后存储单元默认值为0xFF,支持扇区/块/整片擦除,编程前需先擦除。
- 硬件SPI优势:由MCU硬件模块实现,时序精准、占用CPU资源少,传输速率高于IO模拟。
硬件配置(引脚定义)
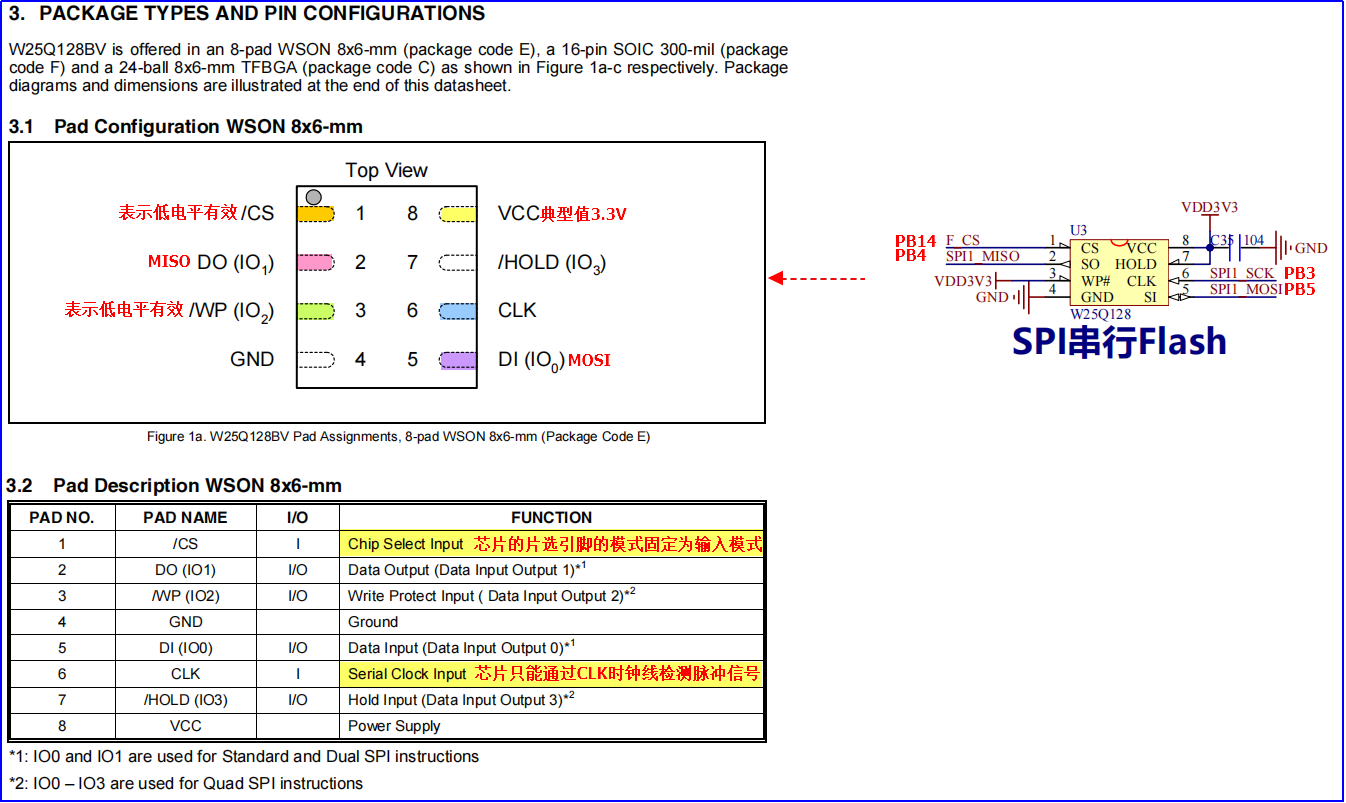
| SPI信号线 | 引脚(查阅原理图) | 模式 | 功能描述 |
|---|---|---|---|
| SCK | GPIOB_Pin3 | 复用推挽 | 时钟信号(主设备产生) |
| MOSI | GPIOB_Pin5 | 复用推挽 | 主设备输出→从设备输入 |
| MISO | GPIOB_Pin4 | 复用推挽 | 主设备输入→从设备输出 |
| CS | GPIOB_Pin14 | 通用推挽 | 片选信号(低电平选中Flash) |
| UART1_TX | GPIOA_Pin9 | 复用推挽 | 串口输出(打印调试信息) |
| UART1_RX | GPIOA_Pin10 | 复用推挽 | 串口输入(接收PC指令) |
指令

- 读取厂商/设备ID

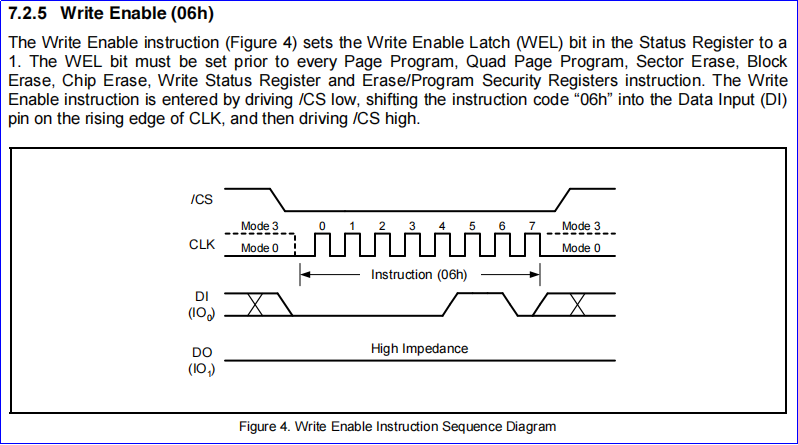
- 写使能
- 读状态寄存器

- 写失能

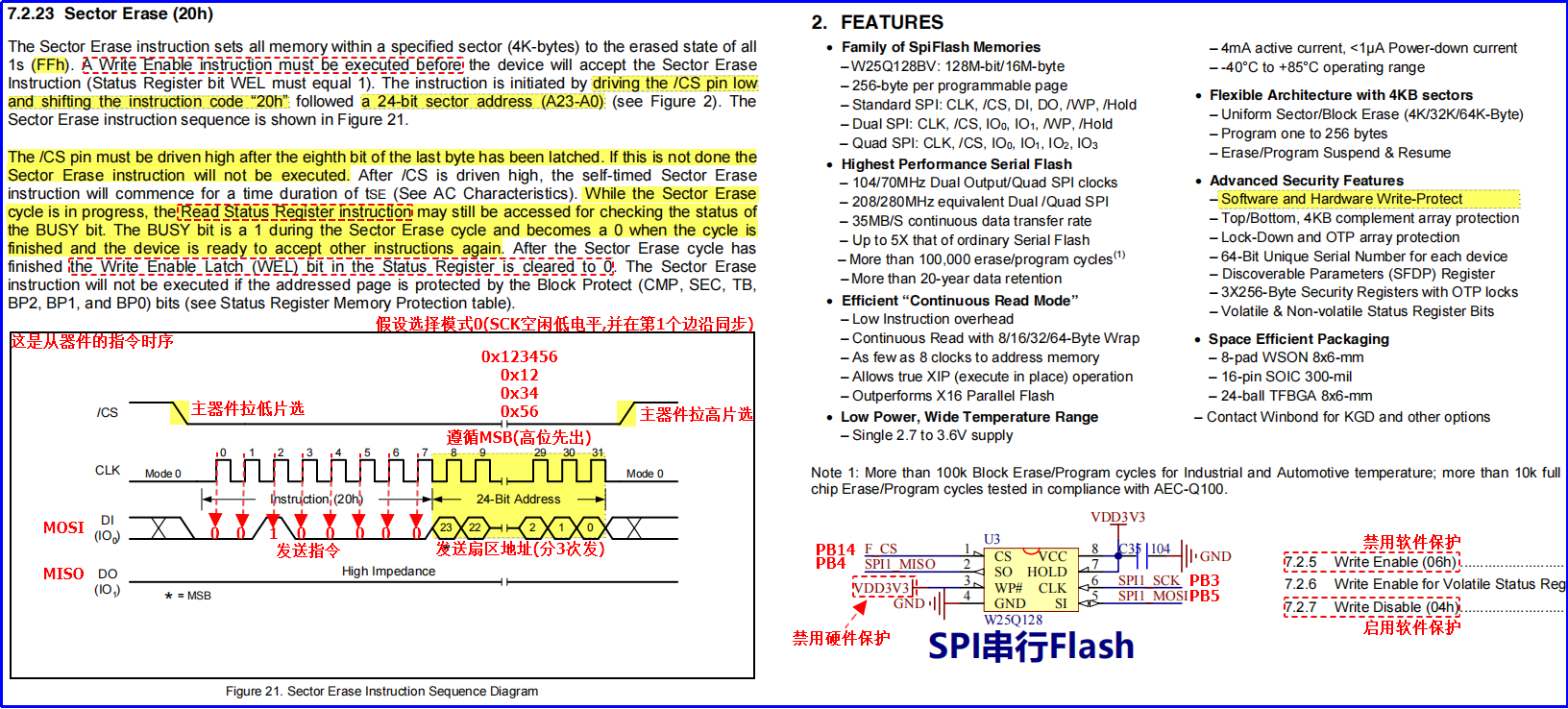
- 擦除扇区
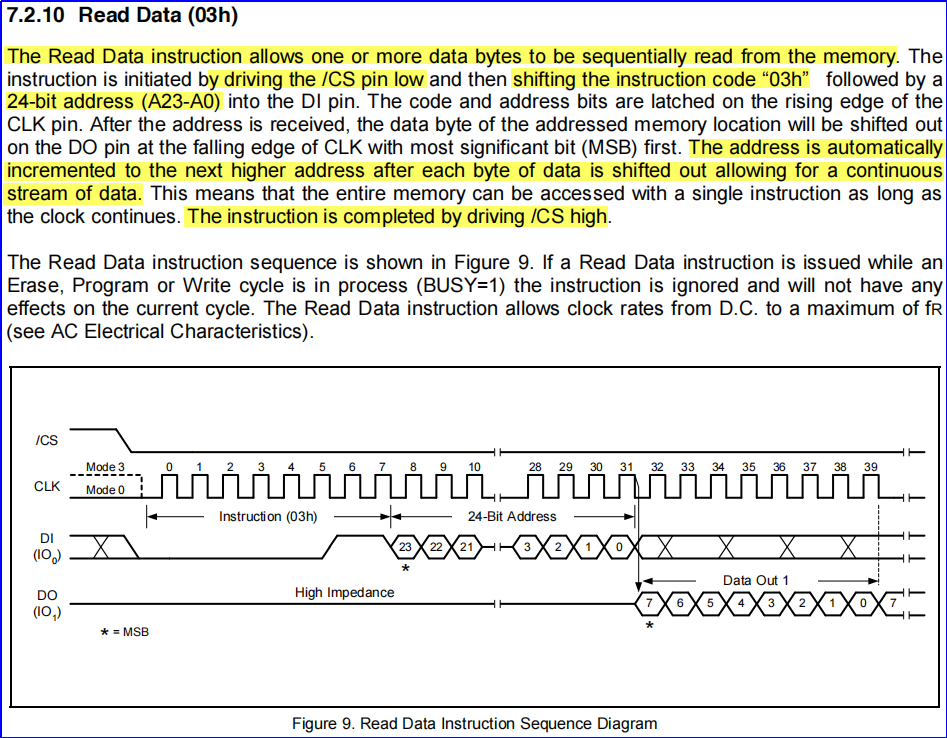
- 读数据
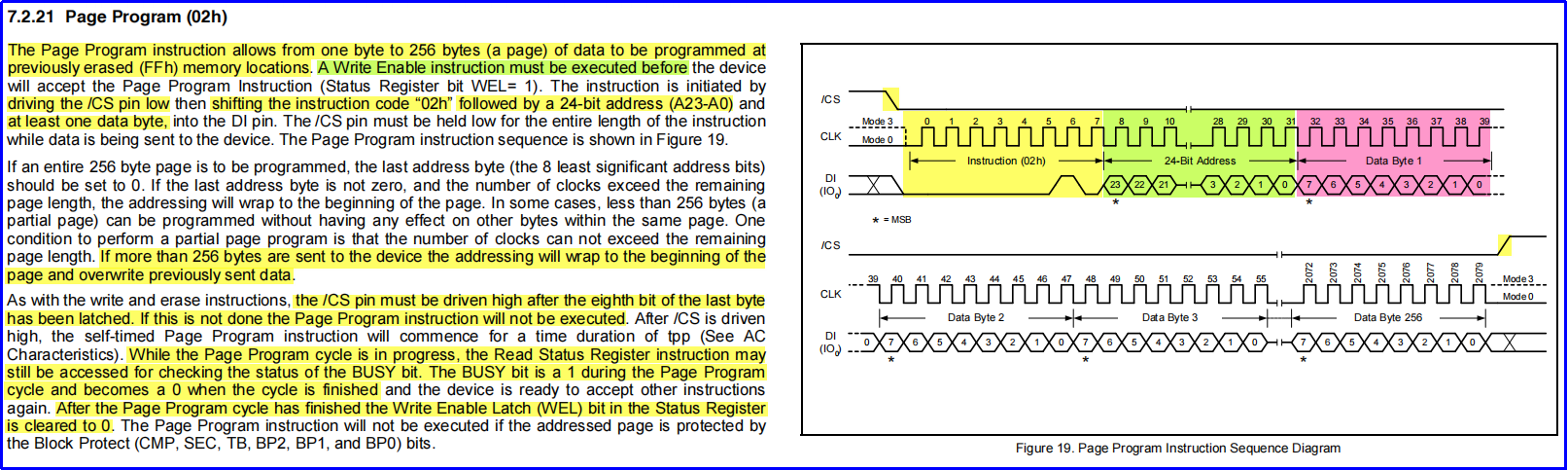
- 页编程
代码
/* Includes ------------------------------------------------------------------*/
#include "stm32f4xx.h"
#include <string.h>
#include <stdio.h>
#include <stdbool.h>
// 重定向fputc函数,支持printf通过USART1打印
int fputc(int ch, FILE *f)
{
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); // 等待发送缓冲区空
USART_SendData(USART1, ch); // 发送字节
return (ch);
}
/* Private define ------------------------------------------------------------*/
// SPI外设及时钟配置
#define sFLASH_SPI SPI1
#define sFLASH_SPI_CLK RCC_APB2Periph_SPI1
#define sFLASH_SPI_CLK_INIT RCC_APB2PeriphClockCmd
// SPI引脚定义(PB3/4/5复用为SPI1)
#define sFLASH_SPI_SCK_PIN GPIO_Pin_3
#define sFLASH_SPI_SCK_GPIO_PORT GPIOB
#define sFLASH_SPI_SCK_GPIO_CLK RCC_AHB1Periph_GPIOB
#define sFLASH_SPI_SCK_SOURCE GPIO_PinSource3
#define sFLASH_SPI_SCK_AF GPIO_AF_SPI1
#define sFLASH_SPI_MISO_PIN GPIO_Pin_4
#define sFLASH_SPI_MISO_GPIO_PORT GPIOB
#define sFLASH_SPI_MISO_GPIO_CLK RCC_AHB1Periph_GPIOB
#define sFLASH_SPI_MISO_SOURCE GPIO_PinSource4
#define sFLASH_SPI_MISO_AF GPIO_AF_SPI1
#define sFLASH_SPI_MOSI_PIN GPIO_Pin_5
#define sFLASH_SPI_MOSI_GPIO_PORT GPIOB
#define sFLASH_SPI_MOSI_GPIO_CLK RCC_AHB1Periph_GPIOB
#define sFLASH_SPI_MOSI_SOURCE GPIO_PinSource5
#define sFLASH_SPI_MOSI_AF GPIO_AF_SPI1
// Flash片选引脚(PB14)
#define sFLASH_CS_PIN GPIO_Pin_14
#define sFLASH_CS_GPIO_PORT GPIOB
#define sFLASH_CS_GPIO_CLK RCC_AHB1Periph_GPIOB
// 片选控制宏
#define sFLASH_CS_LOW() GPIO_ResetBits(sFLASH_CS_GPIO_PORT, sFLASH_CS_PIN) // 选中Flash
#define sFLASH_CS_HIGH() GPIO_SetBits(sFLASH_CS_GPIO_PORT, sFLASH_CS_PIN) // 取消选中
/**
* @brief 底层硬件初始化(GPIO+SPI时钟使能、引脚复用配置)
* @param None
* @retval None
* @note 1. 使能SPI1和对应GPIO时钟
* 2. 配置SPI引脚为复用功能,推挽输出,下拉电阻
* 3. 片选引脚配置为通用推挽输出,无上下拉
*/
void sFLASH_LowLevel_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
sFLASH_SPI_CLK_INIT(sFLASH_SPI_CLK, ENABLE); // 使能SPI1时钟
// 使能所有相关GPIO时钟
RCC_AHB1PeriphClockCmd(sFLASH_SPI_SCK_GPIO_CLK | sFLASH_SPI_MISO_GPIO_CLK |
sFLASH_SPI_MOSI_GPIO_CLK | sFLASH_CS_GPIO_CLK, ENABLE);
// 配置SPI引脚复用功能
GPIO_PinAFConfig(sFLASH_SPI_SCK_GPIO_PORT, sFLASH_SPI_SCK_SOURCE, sFLASH_SPI_SCK_AF);
GPIO_PinAFConfig(sFLASH_SPI_MISO_GPIO_PORT, sFLASH_SPI_MISO_SOURCE, sFLASH_SPI_MISO_AF);
GPIO_PinAFConfig(sFLASH_SPI_MOSI_GPIO_PORT, sFLASH_SPI_MOSI_SOURCE, sFLASH_SPI_MOSI_AF);
// SPI引脚通用配置(复用模式、50MHz速率、推挽、下拉)
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
// 配置SCK引脚
GPIO_InitStructure.GPIO_Pin = sFLASH_SPI_SCK_PIN;
GPIO_Init(sFLASH_SPI_SCK_GPIO_PORT, &GPIO_InitStructure);
// 配置MOSI引脚
GPIO_InitStructure.GPIO_Pin = sFLASH_SPI_MOSI_PIN;
GPIO_Init(sFLASH_SPI_MOSI_GPIO_PORT, &GPIO_InitStructure);
// 配置MISO引脚
GPIO_InitStructure.GPIO_Pin = sFLASH_SPI_MISO_PIN;
GPIO_Init(sFLASH_SPI_MISO_GPIO_PORT, &GPIO_InitStructure);
// 配置片选引脚(通用输出模式)
GPIO_InitStructure.GPIO_Pin = sFLASH_CS_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(sFLASH_CS_GPIO_PORT, &GPIO_InitStructure);
}
/**
* @brief SPI和Flash初始化(配置SPI参数+初始化状态)
* @param None
* @retval None
* @note 1. SPI配置:主模式、全双工、8位数据、模式0、软件片选、4分频、MSB先行
* 2. 初始状态下取消片选(CS=高),避免误操作
*/
void sFLASH_Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
sFLASH_LowLevel_Init(); // 底层硬件初始化
sFLASH_CS_HIGH(); // 初始取消选中Flash
// SPI参数配置
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // 全双工模式
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; // 主设备模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; // 8位数据宽度
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; // 模式0:SCK空闲低电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; // 模式0:第一个边沿(上升沿)采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; // 软件控制片选
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4; // 波特率分频(APB2时钟/4)
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; // 高位先行(SPI标准)
SPI_InitStructure.SPI_CRCPolynomial = 7; // CRC多项式(未使用,填默认值)
SPI_Init(sFLASH_SPI, &SPI_InitStructure);
SPI_Cmd(sFLASH_SPI, ENABLE); // 使能SPI1外设
}
/**
* @brief SPI发送一个字节,并接收从设备返回的字节(全双工特性)
* @param byte:要发送的字节
* @retval 从设备返回的字节
* @note 1. 等待发送缓冲区空→发送字节→等待接收缓冲区非空→读取接收字节
* 2. 硬件SPI自动同步时钟和数据,无需手动控制SCK
*/
uint8_t sFLASH_SendByte(uint8_t byte)
{
while (SPI_I2S_GetFlagStatus(sFLASH_SPI, SPI_I2S_FLAG_TXE) == RESET); // 等待发送缓冲区空
SPI_I2S_SendData(sFLASH_SPI, byte); // 发送字节
while (SPI_I2S_GetFlagStatus(sFLASH_SPI, SPI_I2S_FLAG_RXNE) == RESET); // 等待接收完成
return SPI_I2S_ReceiveData(sFLASH_SPI); // 返回接收字节
}
/**
* @brief 读取W25Q128的厂商ID和设备ID
* @param None
* @retval 16位ID(高8位:厂商ID,低8位:设备ID)
* @note 1. 指令:0x90(Read Manufacturer/Device ID)
* 2. 地址:需发送24位地址0x000000
* 3. 正常返回:厂商ID=0xEF(华邦),设备ID=0x17(W25Q128),组合为0xEF17
*/
uint16_t sFLASH_ReadID(void)
{
uint16_t id = 0;
uint8_t Temp0 = 0, Temp1 = 0;
sFLASH_CS_LOW(); // 1. 选中Flash
sFLASH_SendByte(0x90); // 2. 发送读ID指令
sFLASH_SendByte(0x00); // 3. 发送24位地址(A23-A0=0x000000)
sFLASH_SendByte(0x00);
sFLASH_SendByte(0x00);
Temp0 = sFLASH_SendByte(0xFF); // 4. 读取厂商ID(0xEF)
Temp1 = sFLASH_SendByte(0xFF); // 5. 读取设备ID(0x17)
sFLASH_CS_HIGH(); // 6. 取消选中
id = (Temp0 << 8) | Temp1; // 组合ID(高8位厂商ID,低8位设备ID)
return id;
}
/**
* @brief 发送写使能指令(W25Q128编程/擦除前必须执行)
* @param None
* @retval None
* @note 1. 指令:0x06(Write Enable)
* 2. 功能:置位状态寄存器的WEL位(写使能锁存),允许后续编程/擦除操作
*/
void sFLASH_WriteEnable(void)
{
sFLASH_CS_LOW(); // 选中Flash
sFLASH_SendByte(0x06); // 发送写使能指令
sFLASH_CS_HIGH(); // 取消选中
}
/**
* @brief 发送写失能指令(禁止编程/擦除操作)
* @param None
* @retval None
* @note 1. 指令:0x04(Write Disable)
* 2. 功能:清零状态寄存器的WEL位,禁止编程/擦除操作
* 3. 上电后或编程/擦除完成后,WEL位会自动清零
*/
void sFLASH_WriteDisable(void)
{
sFLASH_CS_LOW(); // 选中Flash
sFLASH_SendByte(0x04); // 发送写失能指令
sFLASH_CS_HIGH(); // 取消选中
}
/**
* @brief 等待Flash写/擦除操作完成(查询忙标志)
* @param None
* @retval None
* @note 1. 指令:0x05(Read Status Register-1)
* 2. 状态寄存器bit0=1表示忙(写/擦除中),bit0=0表示空闲
* 3. 写/擦除是自定时操作,需等待完成后再执行下一条指令
*/
void sFLASH_WaitForWriteEnd(void)
{
uint8_t flashstatus = 0;
sFLASH_CS_LOW(); // 选中Flash
sFLASH_SendByte(0x05); // 发送读状态寄存器指令
do
{
flashstatus = sFLASH_SendByte(0x00); // 发送空字节获取状态寄存器值
} while ((flashstatus & 0x01) == SET); // 等待bit0(忙标志)清零
sFLASH_CS_HIGH(); // 取消选中
}
/**
* @brief 擦除指定扇区(4KB)
* @param SectorAddr:扇区起始地址(需对齐4KB边界,如0x000000、0x001000等)
* @retval None
* @note 1. 指令:0x20(Sector Erase)
* 2. 流程:写使能→发送指令→发送24位扇区地址→等待擦除完成→写失能
* 3. 擦除后扇区内所有单元值为0xFF
* 4. 扇区地址计算:SectorAddr = 扇区编号 × 4096(4KB)
*/
void sFLASH_EraseSector(uint32_t SectorAddr)
{
sFLASH_WriteEnable(); // 1. 写使能
sFLASH_CS_LOW(); // 2. 选中Flash
sFLASH_SendByte(0x20); // 3. 发送扇区擦除指令
// 4. 发送24位扇区地址(高位→低位)
sFLASH_SendByte((SectorAddr & 0xFF0000) >> 16); // 地址高8位
sFLASH_SendByte((SectorAddr & 0xFF00) >> 8); // 地址中8位
sFLASH_SendByte(SectorAddr & 0xFF); // 地址低8位
sFLASH_CS_HIGH(); // 5. 取消选中
sFLASH_WaitForWriteEnd(); // 6. 等待擦除完成(约几十毫秒)
sFLASH_WriteDisable(); // 7. 写失能
}
/**
* @brief 页编程(向指定地址写入1~256字节数据)
* @param pBuffer:存储待写入数据的缓冲区指针
* @param WriteAddr:Flash内部起始地址(需在目标页范围内)
* @param NumByteToWrite:写入字节数(1~256,超过会覆盖当前页起始地址)
* @retval None
* @note 1. 指令:0x02(Page Program)
* 2. 流程:写使能→发送指令→发送地址→写入数据→等待完成→写失能
* 3. 页大小为256字节,地址低8位超过255会自动回卷(覆盖当前页数据)
* 4. 只能将0xFF改为其他值,不能直接覆盖非0xFF数据(需先擦除)
*/
void sFLASH_WritePage(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
sFLASH_WriteEnable(); // 1. 写使能
sFLASH_CS_LOW(); // 2. 选中Flash
sFLASH_SendByte(0x02); // 3. 发送页编程指令
// 4. 发送24位写入地址(高位→低位)
sFLASH_SendByte((WriteAddr & 0xFF0000) >> 16);
sFLASH_SendByte((WriteAddr & 0xFF00) >> 8);
sFLASH_SendByte(WriteAddr & 0xFF);
// 5. 循环写入数据
while (NumByteToWrite--)
{
sFLASH_SendByte(*pBuffer); // 发送当前字节
pBuffer++; // 指向下一字节
}
sFLASH_CS_HIGH(); // 6. 取消选中
sFLASH_WaitForWriteEnd(); // 7. 等待编程完成(约几微秒)
sFLASH_WriteDisable(); // 8. 写失能
}
/**
* @brief 从指定地址读取指定长度数据
* @param pBuffer:存储读取数据的缓冲区指针
* @param ReadAddr:Flash内部起始地址
* @param NumByteToRead:读取字节数
* @retval None
* @note 1. 指令:0x03(Read Data)
* 2. 流程:选中Flash→发送指令→发送地址→循环读取数据→取消选中
* 3. 读取无长度限制,可跨页/跨扇区读取
* 4. 发送空字节(0x00)生成时钟,接收从设备返回的数据
*/
void sFLASH_ReadBuffer(uint8_t* pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead)
{
sFLASH_CS_LOW(); // 1. 选中Flash
sFLASH_SendByte(0x03); // 2. 发送读数据指令
// 3. 发送24位读取地址(高位→低位)
sFLASH_SendByte((ReadAddr & 0xFF0000) >> 16);
sFLASH_SendByte((ReadAddr & 0xFF00) >> 8);
sFLASH_SendByte(ReadAddr & 0xFF);
// 4. 循环读取数据
while (NumByteToRead--)
{
*pBuffer = sFLASH_SendByte(0x00); // 发送空字节获取数据
pBuffer++; // 指向缓冲区下一位置
}
sFLASH_CS_HIGH(); // 5. 取消选中
}
/**
* @brief 微秒级延时
* @param nus:延时时间(单位:微秒)
* @retval None
* @note 1. 基于SysTick定时器实现,时钟源为21MHz(需根据实际系统时钟调整重载值)
* 2. 重载值计算:nus × 时钟频率(MHz) - 1
*/
void delay_us(u32 nus)
{
SysTick->CTRL = 0; // 关闭SysTick定时器
SysTick->LOAD = nus * 21 - 1; // 设置重载值(21MHz时钟)
SysTick->VAL = 0; // 清除当前计数值
SysTick->CTRL = 1; // 启动定时器(使用处理器时钟)
while ((SysTick->CTRL & 0x00010000) == 0); // 等待计数完成(COUNTFLAG位)
SysTick->CTRL = 0; // 关闭定时器
}
/**
* @brief 毫秒级延时
* @param nms:延时时间(单位:毫秒)
* @retval None
* @note 1. 基于SysTick定时器实现,时钟源为21MHz,存在微小误差
* 2. 内部循环调用微秒延时,重载值=21×1000-1(1毫秒)
*/
void delay_ms(u32 nms)
{
while(nms--)
{
SysTick->CTRL = 0; // 关闭SysTick定时器
SysTick->LOAD = 21 * 1000 - 1; // 设置重载值(1毫秒)
SysTick->VAL = 0; // 清除当前计数值
SysTick->CTRL = 1; // 启动定时器
while ((SysTick->CTRL & 0x00010000) == 0); // 等待计数完成
SysTick->CTRL = 0; // 关闭定时器
}
}
/**
* @brief USART1初始化(用于串口调试,打印Flash ID和读写数据)
* @param baud:串口波特率(本工程使用115200)
* @retval None
* @note 1. USART1引脚:TX=PA9,RX=PA10(复用)
* 2. 配置:8位数据位、1位停止位、无校验、无流控、全双工
* 3. 使能接收中断,支持串口数据回显
*/
static void PC_Config(u32 baud)
{
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); // 使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); // 使能USART1时钟
// 配置PA9/PA10为USART1复用功能
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
// 串口引脚配置(复用推挽、100MHz、上拉)
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// USART参数配置
USART_InitStructure.USART_BaudRate = baud;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
// 配置USART1中断(抢占优先级0)
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 使能接收中断(收到数据触发)
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); // 等待发送缓冲区空
USART_ClearITPendingBit(USART1, USART_IT_RXNE); // 清除中断标志位
USART_Cmd(USART1, ENABLE); // 使能USART1
}
/**
* @brief 主函数(Flash读写测试流程)
* @param None
* @retval None
* @note 流程:初始化→读Flash ID→擦除扇区→页编程→读取数据→串口打印结果
*/
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4); // NVIC优先级分组4(抢占优先级0~15)
PC_Config(115200); // 初始化USART1(115200波特率)
sFLASH_Init(); // 初始化Flash和SPI
printf("ID = %#X\r\n", sFLASH_ReadID()); // 读取并打印Flash ID(预期0xEF17)
sFLASH_EraseSector(0x000000); // 擦除0号扇区(地址0x000000~0x000FFF)
sFLASH_WritePage((uint8_t *)"helloworld", 0x000000, 10); // 向0x000000写入10字节数据
uint8_t buf[10] = {0};
sFLASH_ReadBuffer(buf, 0x000005, 5); // 从0x000005读取5字节(预期"world")
printf("buf is [%s]\r\n", buf);
while (1); // 死循环
}
/**
* @brief USART1中断服务函数(接收数据回显)
* @param None
* @retval None
* @note 收到PC端数据后,立即回传给PC端,用于调试验证
*/
void USART1_IRQHandler(void)
{
uint8_t data = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) // 判断是否为接收中断
{
data = USART_ReceiveData(USART1); // 读取接收数据
USART_SendData(USART1, data); // 回传数据
}
}
注意
- 地址对齐:扇区擦除地址需对齐4KB(0x1000),页编程地址低8位不能超过255(否则回卷)。
- 读写顺序:编程前必须先擦除(擦除后为全1)。
- 忙等待:写/擦除操作后必须调用
sFLASH_WaitForWriteEnd(),否则后续指令会被忽略。 - 时钟配置:SPI波特率不能超过W25Q128的最大时钟(133MHz),持续数据传输速率为35MHZ,本工程4分频足够安全。
- 引脚复用:硬件SPI引脚必须配置为对应复用功能,否则通信失败。
IO模拟SPI原理
- IO模拟SPI:不依赖MCU硬件SPI模块,通过软件控制4个通用IO口模拟SPI时序(SCK、MOSI输出,MISO输入,CS输出)。
- 优势:引脚选择灵活(可使用任意空闲IO),无需占用硬件SPI资源,适配无硬件SPI的MCU或SPI资源已占用的场景。
- 劣势:时序由软件控制,占用CPU资源,传输速率低于硬件SPI,需精准控制延时(本工程未额外加延时,时钟速率由代码执行速度决定)。
硬件配置(引脚定义)
| SPI信号线 | 引脚 | 模式 | 功能描述 |
|---|---|---|---|
| SCK | GPIOB_Pin3 | 通用推挽 | 时钟信号(软件控制高低电平) |
| MOSI | GPIOB_Pin5 | 通用推挽 | 主设备输出→从设备输入 |
| MISO | GPIOB_Pin4 | 通用输入 | 主设备输入→从设备输出 |
| CS | GPIOB_Pin14 | 通用推挽 | 片选信号(低电平选中) |
| UART1_TX | GPIOA_Pin9 | 复用推挽 | 串口输出(调试) |
| UART1_RX | GPIOA_Pin10 | 复用推挽 | 串口输入(调试) |
代码(差异部分)
/* Private define ------------------------------------------------------------*/
#define MODE_0 1 // 1=SPI模式0,0=SPI模式3
// IO模拟SPI引脚定义
#define sFLASH_SPI_SCK_PIN GPIO_Pin_3
#define sFLASH_SPI_SCK_GPIO_PORT GPIOB
#define sFLASH_SPI_SCK_GPIO_CLK RCC_AHB1Periph_GPIOB
#define sFLASH_SPI_MISO_PIN GPIO_Pin_4
#define sFLASH_SPI_MISO_GPIO_PORT GPIOB
#define sFLASH_SPI_MISO_GPIO_CLK RCC_AHB1Periph_GPIOB
#define sFLASH_SPI_MOSI_PIN GPIO_Pin_5
#define sFLASH_SPI_MOSI_GPIO_PORT GPIOB
#define sFLASH_SPI_MOSI_GPIO_CLK RCC_AHB1Periph_GPIOB
#define sFLASH_CS_PIN GPIO_Pin_14
#define sFLASH_CS_GPIO_PORT GPIOB
#define sFLASH_CS_GPIO_CLK RCC_AHB1Periph_GPIOB
// 引脚电平控制宏
#define sFLASH_CS_LOW() GPIO_ResetBits(sFLASH_CS_GPIO_PORT, sFLASH_CS_PIN)
#define sFLASH_CS_HIGH() GPIO_SetBits(sFLASH_CS_GPIO_PORT, sFLASH_CS_PIN)
#define sFLASH_SCK_LOW() GPIO_ResetBits(sFLASH_SPI_SCK_GPIO_PORT, sFLASH_SPI_SCK_PIN)
#define sFLASH_SCK_HIGH() GPIO_SetBits(sFLASH_SPI_SCK_GPIO_PORT, sFLASH_SPI_SCK_PIN)
#define sFLASH_MOSI_LOW() GPIO_ResetBits(sFLASH_SPI_MOSI_GPIO_PORT, sFLASH_SPI_MOSI_PIN)
#define sFLASH_MOSI_HIGH() GPIO_SetBits(sFLASH_SPI_MOSI_GPIO_PORT, sFLASH_SPI_MOSI_PIN)
#define sFLASH_MISO_READ() GPIO_ReadInputDataBit(sFLASH_SPI_MISO_GPIO_PORT, sFLASH_SPI_MISO_PIN)
/* Private function prototypes -----------------------------------------------*/
// 同硬件SPI版本,仅新增/修改sFLASH_LowLevel_Init()和sFLASH_SendByte()
/**
* @brief 底层IO初始化(配置SPI引脚为输入/输出模式)
* @param None
* @retval None
* @note 1. SCK、MOSI、CS配置为推挽输出,MISO配置为输入模式
* 2. 根据MODE_0宏定义设置SCK初始电平(模式0=低,模式3=高)
*/
void sFLASH_LowLevel_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能所有相关GPIO时钟
RCC_AHB1PeriphClockCmd(sFLASH_SPI_SCK_GPIO_CLK | sFLASH_SPI_MISO_GPIO_CLK |
sFLASH_SPI_MOSI_GPIO_CLK | sFLASH_CS_GPIO_CLK, ENABLE);
// 配置SCK、MOSI为推挽输出模式
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
// 配置SCK引脚
GPIO_InitStructure.GPIO_Pin = sFLASH_SPI_SCK_PIN;
GPIO_Init(sFLASH_SPI_SCK_GPIO_PORT, &GPIO_InitStructure);
// 配置MOSI引脚
GPIO_InitStructure.GPIO_Pin = sFLASH_SPI_MOSI_PIN;
GPIO_Init(sFLASH_SPI_MOSI_GPIO_PORT, &GPIO_InitStructure);
// 配置MISO引脚为输入模式
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_Pin = sFLASH_SPI_MISO_PIN;
GPIO_Init(sFLASH_SPI_MISO_GPIO_PORT, &GPIO_InitStructure);
// 配置CS引脚为推挽输出模式
GPIO_InitStructure.GPIO_Pin = sFLASH_CS_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(sFLASH_CS_GPIO_PORT, &GPIO_InitStructure);
#if MODE_0
sFLASH_SCK_LOW(); // 模式0:SCK空闲低电平
#else
sFLASH_SCK_HIGH(); // 模式3:SCK空闲高电平
#endif
}
/**
* @brief SPI初始化(仅初始化IO,无SPI外设配置)
* @param None
* @retval None
* @note 初始状态取消片选(CS=高),避免误操作
*/
void sFLASH_Init(void)
{
sFLASH_LowLevel_Init(); // 初始化IO引脚
sFLASH_CS_HIGH(); // 取消选中Flash
}
/**
* @brief 模拟SPI模式0发送一个字节,并接收从设备返回字节
* @param byte:要发送的字节
* @retval 从设备返回的字节
* @note 模式0时序:
* 1. SCK初始为低(空闲状态)
* 2. 高位先行,依次发送8位数据(bit7→bit0)
* 3. 拉高SCK(第一个边沿),从设备采样MOSI数据,主设备读取MISO数据
* 4. 拉低SCK,完成一个bit传输,准备下一bit数据,循环8次
*/
#if MODE_0
uint8_t sFLASH_SendByte(uint8_t byte)
{
uint8_t cnt = 0;
uint8_t data = 0; // 存储接收数据
sFLASH_SCK_LOW(); // 确保SCK为空闲低电平
for(cnt = 0; cnt < 8; cnt++) // 循环发送8位(高位先行)
{
// 准备当前bit数据(bit7先发送)
if(byte & 0x80) // 判断当前最高位是否为1
sFLASH_MOSI_HIGH();
else
sFLASH_MOSI_LOW();
byte <<= 1; // 左移一位,准备下一位数据
sFLASH_SCK_HIGH(); // 拉高SCK(上升沿),从设备采样
data <<= 1; // 接收数据左移一位,准备存储新bit
data |= sFLASH_MISO_READ(); // 读取MISO引脚电平(0或1)
sFLASH_SCK_LOW(); // 拉低SCK,完成一个bit传输
}
return data;
}
/**
* @brief 模拟SPI模式3发送一个字节,并接收从设备返回字节
* @param byte:要发送的字节
* @retval 从设备返回的字节
* @note 模式3时序:
* 1. SCK初始为高(空闲状态)
* 2. 高位先行,依次发送8位数据(bit7→bit0)
* 3. 拉低SCK(第一个边沿),准备数据
* 4. 拉高SCK,完成一个bit传输,循环8次
*/
#else
uint8_t sFLASH_SendByte(uint8_t byte)
{
uint8_t cnt = 0;
uint8_t data = 0; // 存储接收数据
sFLASH_SCK_HIGH(); // 确保SCK为空闲高电平
for(cnt = 0; cnt < 8; cnt++) // 循环发送8位(高位先行)
{
sFLASH_SCK_LOW(); // 拉低SCK,准备数据
// 准备当前bit数据(bit7先发送)
if(byte & 0x80) // 判断当前最高位是否为1
sFLASH_MOSI_HIGH();
else
sFLASH_MOSI_LOW();
byte <<= 1; // 左移一位,准备下一位数据
sFLASH_SCK_HIGH(); // 拉高SCK,完成一个bit传输
data <<= 1; // 接收数据左移一位,准备存储新bit
data |= sFLASH_MISO_READ(); // 读取MISO引脚电平(0或1)
}
return data;
}
#endif
// 其他函数(ReadID、WriteEnable、EraseSector等)与硬件SPI版本完全一致
// 主函数流程也与硬件SPI版本一致,此处省略重复代码
注意
- 时序匹配:主设备和从设备(W25Q128)的SPI模式必须一致(W25Q128支持模式0和3),默认优先选择模式0。
- 引脚方向:严格区分输入/输出引脚(MISO为输入,其余为输出),配置错误会导致通信失败。
- 速率控制:若传输速率过快(代码执行过慢),可在SCK电平切换处添加
delay_us(1)等延时,确保从设备能正确采样。
IO模拟SPI实现RFID模块(MFRC522)卡号获取
基本概念
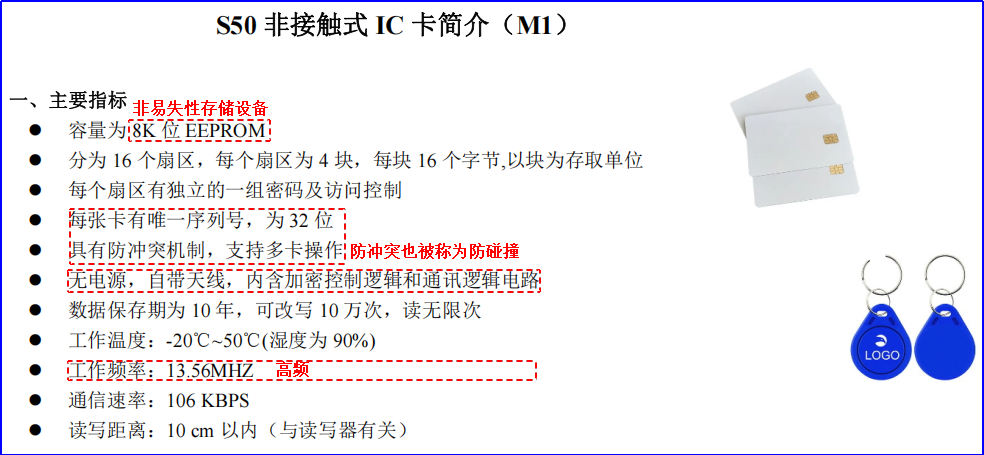
- 芯片定位:MFRC522 是恩智浦(NXP)推出的高度集成化射频卡读写器芯片,专为 13.56MHz 非接触式通信设计,是 RFID 系统的核心驱动 IC。
- 核心功能:支持对 ISO/IEC 14443A 协议、MIFARE 系列卡片(如 M1 卡)的读写操作,可实现无接触式信息采集与数据交互,是物联网 “万物互联” 理念的关键实现器件之一。
- 核心优势:集成度高(内置发射 / 接收电路、解调解码模块、帧处理与错误检测单元)、通信速率灵活(支持 106Kbit/s、424Kbit/s、848Kbit/s)、接口多样化,适配多种嵌入式系统场景。
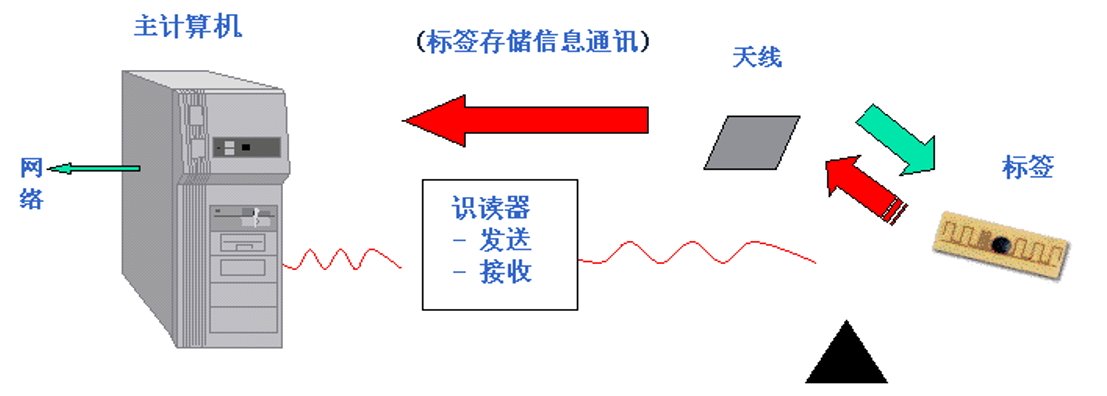
RFID 系统结构组成(基于 MFRC522)
RFID 系统需软硬件协同,MFRC522 作为阅读器核心,系统整体结构如下:
工作原理(含 M1 卡交互流程)
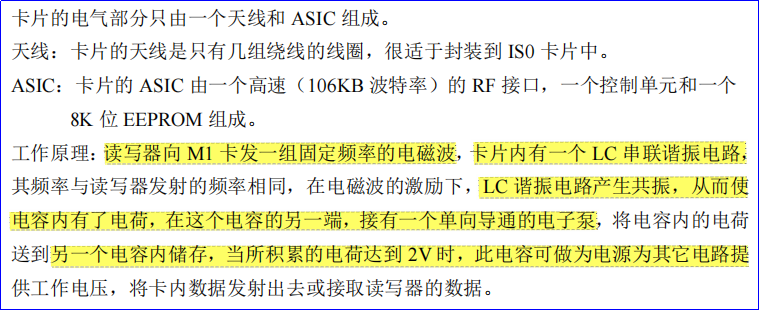
能量与信号传输原理
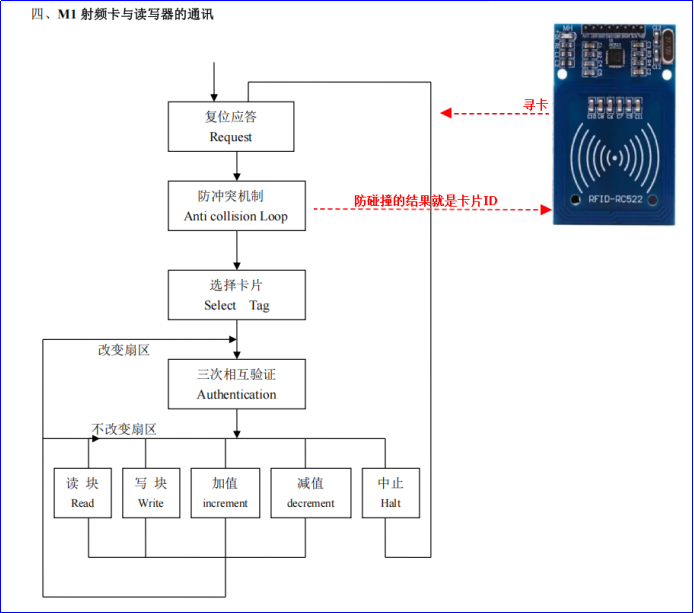
阅读器与 M1 卡通信流程
通信接口
MFRC522 支持多种主机接口,适配不同硬件设计需求:
- 支持接口:SPI、I2C、UART;
- 本次应用选择:SPI 接口(通过 MCU IO 口模拟时序实现,灵活适配硬件资源)。
工作模式
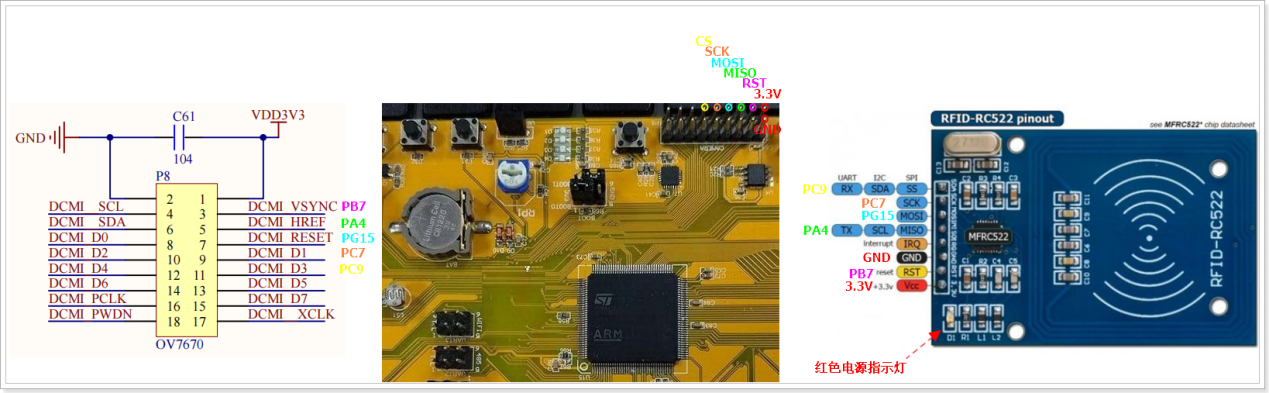
硬件接线(IO 模拟 SPI 方案)
因采用 IO 口模拟 SPI 时序控制,需从 MCU 选取 4 个空闲 IO 引脚,对应 SPI 核心信号线:
| SPI 信号线 | 功能说明 | MCU 引脚配置 |
|---|---|---|
| SCK(串行时钟) | 同步数据传输时钟(主机产生) | 输出模式 |
| MOSI(主出从入) | 主机向 MFRC522 发送数据 | 输出模式 |
| MISO(主入从出) | MFRC522 向主机返回数据 | 输入模式 |
| CS(片选) | 选择目标 MFRC522 芯片(低电平有效) | 输出模式 |
代码(含MFRC522驱动适配)
MFRC522.h
#ifndef _MFRC522_H_
#define _MFRC522_H_
#include "stm32f4xx.h"
#include <stdint.h>
/************************ MFRC522 SPI引脚定义 ************************/
// SPI引脚映射(STM32F4)
#define MFRC522_SPI_SCK_PIN GPIO_Pin_7
#define MFRC522_SPI_SCK_GPIO_PORT GPIOC
#define MFRC522_SPI_SCK_GPIO_CLK RCC_AHB1Periph_GPIOC
#define MFRC522_SPI_MISO_PIN GPIO_Pin_4
#define MFRC522_SPI_MISO_GPIO_PORT GPIOA
#define MFRC522_SPI_MISO_GPIO_CLK RCC_AHB1Periph_GPIOA
#define MFRC522_SPI_MOSI_PIN GPIO_Pin_15
#define MFRC522_SPI_MOSI_GPIO_PORT GPIOG
#define MFRC522_SPI_MOSI_GPIO_CLK RCC_AHB1Periph_GPIOG
#define MFRC522_CS_PIN GPIO_Pin_9
#define MFRC522_CS_GPIO_PORT GPIOC
#define MFRC522_CS_GPIO_CLK RCC_AHB1Periph_GPIOC
#define MFRC522_RST_PIN GPIO_Pin_7
#define MFRC522_RST_GPIO_PORT GPIOB
#define MFRC522_RST_GPIO_CLK RCC_AHB1Periph_GPIOB
/************************ 引脚操作宏 ************************/
#define MFRC522_CS_LOW() GPIO_ResetBits(MFRC522_CS_GPIO_PORT, MFRC522_CS_PIN)
#define MFRC522_CS_HIGH() GPIO_SetBits(MFRC522_CS_GPIO_PORT, MFRC522_CS_PIN)
#define MFRC522_SCK_LOW() GPIO_ResetBits(MFRC522_SPI_SCK_GPIO_PORT, MFRC522_SPI_SCK_PIN)
#define MFRC522_SCK_HIGH() GPIO_SetBits(MFRC522_SPI_SCK_GPIO_PORT, MFRC522_SPI_SCK_PIN)
#define MFRC522_MOSI_LOW() GPIO_ResetBits(MFRC522_SPI_MOSI_GPIO_PORT, MFRC522_SPI_MOSI_PIN)
#define MFRC522_MOSI_HIGH() GPIO_SetBits(MFRC522_SPI_MOSI_GPIO_PORT, MFRC522_SPI_MOSI_PIN)
#define MFRC522_RST_LOW() GPIO_ResetBits(MFRC522_RST_GPIO_PORT, MFRC522_RST_PIN)
#define MFRC522_RST_HIGH() GPIO_SetBits(MFRC522_RST_GPIO_PORT, MFRC522_RST_PIN)
#define MFRC522_MISO_READ() GPIO_ReadInputDataBit(MFRC522_SPI_MISO_GPIO_PORT, MFRC522_SPI_MISO_PIN)
/************************ MFRC522 命令字 ************************/
#define PCD_IDLE 0x00 // 空闲状态
#define PCD_AUTHENT 0x0E // 验证密钥
#define PCD_TRANSCEIVE 0x0C // 发送并接收数据
#define PCD_RESETPHASE 0x0F // 复位
#define PCD_CALCCRC 0x03 // 计算CRC
/************************ Mifare卡命令字 ************************/
#define PICC_REQIDL 0x26 // 寻未休眠卡
#define PICC_REQALL 0x52 // 寻所有卡
#define PICC_ANTICOLL1 0x93 // 防冲突
#define PICC_AUTHENT1A 0x60 // 验证A密钥
#define PICC_AUTHENT1B 0x61 // 验证B密钥
#define PICC_READ 0x30 // 读块
#define PICC_WRITE 0xA0 // 写块
#define PICC_HALT 0x50 // 休眠卡
/************************ MFRC522 寄存器地址 ************************/
#define CommandReg 0x01
#define ComIEnReg 0x02
#define ComIrqReg 0x04
#define ErrorReg 0x06
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define ModeReg 0x11
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegL 0x2D
#define TReloadRegH 0x2C
#define CRCResultRegL 0x22
#define CRCResultRegH 0x21
#define DivIrqReg 0x05
/************************ 通信状态码 ************************/
#define MI_OK 0 // 成功
#define MI_NOTAGERR 1 // 无卡
#define MI_ERR 2 // 错误
/************************ 常量定义 ************************/
#define MAX_LEN 18 // FIFO最大长度
/************************ 函数声明 ************************/
void Delay1_us(uint16_t count);
void MFRC522_LowLevel_Init(void); // 底层硬件初始化
void MFRC522_Init(void); // MFRC522初始化(对外接口)
void MFRC522_Reset(void); // 复位MFRC522
void Write_MFRC522(uint8_t addr, uint8_t val); // 写寄存器
uint8_t Read_MFRC522(uint8_t addr); // 读寄存器
void SetBitMask(uint8_t reg, uint8_t mask); // 设置寄存器位
void ClearBitMask(uint8_t reg, uint8_t mask); // 清除寄存器位
void AntennaOn(void); // 开启天线
void AntennaOff(void); // 关闭天线
uint8_t MFRC522_ToCard(uint8_t command, uint8_t *sendData, uint8_t sendLen, uint8_t *backData, uint16_t *backLen); // 卡通信
uint8_t MFRC522_Request(uint8_t reqMode, uint8_t *TagType); // 寻卡
uint8_t MFRC522_Anticoll(uint8_t *serNum); // 防冲突(读卡号)
void CalulateCRC(uint8_t *pIndata, uint8_t len, uint8_t *pOutData); // 计算CRC
uint8_t MFRC522_SelectTag(uint8_t *serNum); // 选卡
uint8_t MFRC522_Auth(uint8_t authMode, uint8_t BlockAddr, uint8_t *Sectorkey, uint8_t *serNum); // 验证密钥
uint8_t MFRC522_Read(uint8_t blockAddr, uint8_t *recvData); // 读卡块
uint8_t MFRC522_Write(uint8_t blockAddr, uint8_t *writeData); // 写卡块
void MFRC522_Halt(void); // 休眠卡
#endif
MFRC522.c
#include "MFRC522.h"
/************************ 微秒延时函数 ************************/
void Delay1_us(uint16_t nus)
{
u32 reload = 0;
// 关闭Systick定时器
SysTick->CTRL = 0;
// 计算重装载值:nus * 21(21MHz时钟,1μs计数21次)
reload = nus * 21;
// 设置重装载值(最大不超过16777215)
SysTick->LOAD = reload > 0xFFFFFF ? 0xFFFFFF : reload;
// 清零当前值和COUNTFLAG位
SysTick->VAL = 0;
// 使能Systick,选择外部时钟源(CLKSOURCE=0),不产生中断(TICKINT=0)
SysTick->CTRL = 1;
// 等待计数完成(COUNTFLAG=1)
while(!(SysTick->CTRL & (1 << 16)));
// 关闭Systick定时器
SysTick->CTRL = 0;
}
/************************ SPI单字节收发 ************************/
uint8_t MFRC522_SendByte(uint8_t byte)
{
uint8_t cnt = 0;
uint8_t data = 0;
MFRC522_SCK_LOW(); // SCK初始低电平(SPI Mode0)
for(cnt=0; cnt<8; cnt++) // 高位先行
{
// 发送1bit
if(byte & 0x80)
MFRC522_MOSI_HIGH();
else
MFRC522_MOSI_LOW();
byte <<= 1;
// 拉高SCK,触发从机采样
MFRC522_SCK_HIGH();
// 读取1bit
data <<= 1;
data |= MFRC522_MISO_READ();
// 拉低SCK,准备下一位
MFRC522_SCK_LOW();
}
return data;
}
/************************ 写MFRC522寄存器 ************************/
void Write_MFRC522(uint8_t addr, uint8_t val)
{
MFRC522_CS_LOW(); // 选中设备
MFRC522_SendByte((addr << 1) & 0x7E); // 地址格式:0XXXXXX0
MFRC522_SendByte(val); // 写数据
MFRC522_CS_HIGH(); // 取消选中
}
/************************ 读MFRC522寄存器 ************************/
uint8_t Read_MFRC522(uint8_t addr)
{
uint8_t val;
MFRC522_CS_LOW(); // 选中设备
MFRC522_SendByte(((addr << 1) & 0x7E) | 0x80); // 地址格式:1XXXXXX0
val = MFRC522_SendByte(0xFF); // 读数据(发送0xFF触发从机返回)
MFRC522_CS_HIGH(); // 取消选中
return val;
}
/************************ 设置寄存器位掩码 ************************/
void SetBitMask(uint8_t reg, uint8_t mask)
{
uint8_t tmp = Read_MFRC522(reg);
Write_MFRC522(reg, tmp | mask);
}
/************************ 清除寄存器位掩码 ************************/
void ClearBitMask(uint8_t reg, uint8_t mask)
{
uint8_t tmp = Read_MFRC522(reg);
Write_MFRC522(reg, tmp & (~mask));
}
/************************ 开启天线 ************************/
void AntennaOn(void)
{
uint8_t temp = Read_MFRC522(TxControlReg);
if((temp & 0x03) == 0)
{
SetBitMask(TxControlReg, 0x03);
}
}
/************************ 关闭天线 ************************/
void AntennaOff(void)
{
ClearBitMask(TxControlReg, 0x03);
}
/************************ 复位MFRC522 ************************/
void MFRC522_Reset(void)
{
MFRC522_RST_HIGH();
Delay1_us(1);
MFRC522_RST_LOW();
Delay1_us(1);
MFRC522_RST_HIGH();
Delay1_us(1);
Write_MFRC522(CommandReg, PCD_RESETPHASE);
}
/************************ 底层硬件初始化(GPIO) ************************/
void MFRC522_LowLevel_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能所有相关GPIO时钟
RCC_AHB1PeriphClockCmd(MFRC522_SPI_SCK_GPIO_CLK | MFRC522_SPI_MISO_GPIO_CLK |
MFRC522_SPI_MOSI_GPIO_CLK | MFRC522_CS_GPIO_CLK |
MFRC522_RST_GPIO_CLK, ENABLE);
// 配置SCK/MOSI/CS/RST为推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
// SCK
GPIO_InitStructure.GPIO_Pin = MFRC522_SPI_SCK_PIN;
GPIO_Init(MFRC522_SPI_SCK_GPIO_PORT, &GPIO_InitStructure);
// MOSI
GPIO_InitStructure.GPIO_Pin = MFRC522_SPI_MOSI_PIN;
GPIO_Init(MFRC522_SPI_MOSI_GPIO_PORT, &GPIO_InitStructure);
// CS
GPIO_InitStructure.GPIO_Pin = MFRC522_CS_PIN;
GPIO_Init(MFRC522_CS_GPIO_PORT, &GPIO_InitStructure);
// RST
GPIO_InitStructure.GPIO_Pin = MFRC522_RST_PIN;
GPIO_Init(MFRC522_RST_GPIO_PORT, &GPIO_InitStructure);
// 配置MISO为上拉输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Pin = MFRC522_SPI_MISO_PIN;
GPIO_Init(MFRC522_SPI_MISO_GPIO_PORT, &GPIO_InitStructure);
// 初始电平
MFRC522_CS_HIGH();
MFRC522_SCK_LOW();
MFRC522_MOSI_LOW();
MFRC522_RST_HIGH();
}
/************************ MFRC522初始化(对外接口) ************************/
void MFRC522_Init(void)
{
MFRC522_LowLevel_Init(); // 底层GPIO初始化
MFRC522_Reset(); // 复位芯片
// 配置定时器(25ms超时)
Write_MFRC522(TModeReg, 0x8D); // 自动计数模式
Write_MFRC522(TPrescalerReg, 0x3E); // 预分频值
Write_MFRC522(TReloadRegL, 0x32); // 计数低8位
Write_MFRC522(TReloadRegH, 0x00); // 计数高8位
Write_MFRC522(TxAutoReg, 0x40); // 100%ASK调制
Write_MFRC522(ModeReg, 0x3D); // CRC初始值0x6363
Write_MFRC522(CommandReg, 0x00); // 启动MFRC522
AntennaOn(); // 开启天线
}
/************************ 与卡片通信核心函数 ************************/
uint8_t MFRC522_ToCard(uint8_t command, uint8_t *sendData, uint8_t sendLen, uint8_t *backData, uint16_t *backLen)
{
uint8_t status = MI_ERR;
uint8_t irqEn = 0x00;
uint8_t waitIRq = 0x00;
uint8_t n, lastBits;
uint16_t i;
// 根据命令配置中断
switch(command)
{
case PCD_AUTHENT:
irqEn = 0x12;
waitIRq = 0x10;
break;
case PCD_TRANSCEIVE:
irqEn = 0x77;
waitIRq = 0x30;
break;
default:
break;
}
Write_MFRC522(ComIEnReg, irqEn | 0x80); // 使能中断
ClearBitMask(ComIrqReg, 0x80); // 清除所有中断标志
SetBitMask(FIFOLevelReg, 0x80); // 清空FIFO
Write_MFRC522(CommandReg, PCD_IDLE); // 空闲模式
// 写入发送数据到FIFO
for(i=0; i<sendLen; i++)
{
Write_MFRC522(FIFODataReg, sendData[i]);
}
// 执行命令
Write_MFRC522(CommandReg, command);
if(command == PCD_TRANSCEIVE)
{
SetBitMask(BitFramingReg, 0x80); // 开始发送
}
// 等待中断(超时10000次)
i = 10000;
do
{
n = Read_MFRC522(ComIrqReg);
i--;
} while((i != 0) && !(n & 0x01) && !(n & waitIRq));
ClearBitMask(BitFramingReg, 0x80); // 停止发送
// 处理响应
if(i != 0)
{
if(!(Read_MFRC522(ErrorReg) & 0x1B)) // 无错误(缓冲区溢出/冲突/CRC/协议)
{
status = MI_OK;
if(n & irqEn & 0x01)
{
status = MI_NOTAGERR; // 无卡
}
// 接收数据处理
if(command == PCD_TRANSCEIVE)
{
n = Read_MFRC522(FIFOLevelReg); // FIFO中数据长度
lastBits = Read_MFRC522(ControlReg) & 0x07; // 最后字节的有效位
if(lastBits != 0)
*backLen = (n-1)*8 + lastBits;
else
*backLen = n*8;
if(n == 0) n = 1;
if(n > MAX_LEN) n = MAX_LEN;
// 读取FIFO数据
for(i=0; i<n; i++)
{
backData[i] = Read_MFRC522(FIFODataReg);
}
}
}
else
{
status = MI_ERR; // 通信错误
}
}
Write_MFRC522(ControlReg, 0x80); // 停止定时器
Write_MFRC522(CommandReg, PCD_IDLE); // 空闲模式
return status;
}
/************************ 寻卡 ************************/
uint8_t MFRC522_Request(uint8_t reqMode, uint8_t *TagType)
{
uint8_t status;
uint16_t backBits;
Write_MFRC522(BitFramingReg, 0x07); // 配置发送位数
TagType[0] = reqMode;
status = MFRC522_ToCard(PCD_TRANSCEIVE, TagType, 1, TagType, &backBits);
if((status != MI_OK) || (backBits != 0x10))
{
status = MI_ERR;
}
return status;
}
/************************ 防冲突(读卡号) ************************/
uint8_t MFRC522_Anticoll(uint8_t *serNum)
{
uint8_t status;
uint8_t i, serNumCheck = 0;
uint16_t unLen;
ClearBitMask(Status2Reg, 0x08);
ClearBitMask(CollReg, 0x80);
Write_MFRC522(BitFramingReg, 0x00);
serNum[0] = PICC_ANTICOLL1;
serNum[1] = 0x20;
status = MFRC522_ToCard(PCD_TRANSCEIVE, serNum, 2, serNum, &unLen);
if(status == MI_OK)
{
// 校验卡号
for(i=0; i<4; i++)
{
serNumCheck ^= serNum[i];
}
if(serNumCheck != serNum[4])
{
status = MI_ERR;
}
}
SetBitMask(CollReg, 0x80);
return status;
}
/************************ 计算CRC ************************/
void CalulateCRC(uint8_t *pIndata, uint8_t len, uint8_t *pOutData)
{
uint16_t i;
uint8_t n;
ClearBitMask(DivIrqReg, 0x04); // 清除CRC中断
SetBitMask(FIFOLevelReg, 0x80); // 清空FIFO
Write_MFRC522(CommandReg, PCD_IDLE);
// 写入数据到FIFO
for(i=0; i<len; i++)
{
Write_MFRC522(FIFODataReg, pIndata[i]);
}
Write_MFRC522(CommandReg, PCD_CALCCRC); // 开始计算CRC
// 等待CRC计算完成
i = 1000;
do
{
n = Read_MFRC522(DivIrqReg);
i--;
} while((i != 0) && !(n & 0x04));
// 读取CRC结果
pOutData[0] = Read_MFRC522(CRCResultRegL);
pOutData[1] = Read_MFRC522(CRCResultRegH);
}
/************************ 选卡 ************************/
uint8_t MFRC522_SelectTag(uint8_t *serNum)
{
uint8_t i, status, size;
uint16_t recvBits;
uint8_t buffer[9];
buffer[0] = PICC_ANTICOLL1;
buffer[1] = 0x70;
buffer[6] = 0x00;
// 填充卡号和校验位
for(i=0; i<4; i++)
{
buffer[i+2] = serNum[i];
buffer[6] ^= serNum[i];
}
CalulateCRC(buffer, 7, &buffer[7]); // 计算CRC
ClearBitMask(Status2Reg, 0x08);
status = MFRC522_ToCard(PCD_TRANSCEIVE, buffer, 9, buffer, &recvBits);
if((status == MI_OK) && (recvBits == 0x18))
{
size = buffer[0];
}
else
{
size = 0;
}
return size;
}
/************************ 验证密钥 ************************/
uint8_t MFRC522_Auth(uint8_t authMode, uint8_t BlockAddr, uint8_t *Sectorkey, uint8_t *serNum)
{
uint8_t status;
uint16_t recvBits;
uint8_t i;
uint8_t buff[12];
buff[0] = authMode;
buff[1] = BlockAddr;
for(i=0; i<6; i++) // 密钥
{
buff[i+2] = Sectorkey[i];
}
for(i=0; i<4; i++) // 卡号
{
buff[i+8] = serNum[i];
}
status = MFRC522_ToCard(PCD_AUTHENT, buff, 12, buff, &recvBits);
if((status != MI_OK) || (!(Read_MFRC522(Status2Reg) & 0x08)))
{
status = MI_ERR;
}
return status;
}
/************************ 读卡块 ************************/
uint8_t MFRC522_Read(uint8_t blockAddr, uint8_t *recvData)
{
uint8_t status;
uint16_t unLen;
recvData[0] = PICC_READ;
recvData[1] = blockAddr;
CalulateCRC(recvData, 2, &recvData[2]);
status = MFRC522_ToCard(PCD_TRANSCEIVE, recvData, 4, recvData, &unLen);
if((status != MI_OK) || (unLen != 0x90))
{
status = MI_ERR;
}
return status;
}
/************************ 写卡块 ************************/
uint8_t MFRC522_Write(uint8_t blockAddr, uint8_t *writeData)
{
uint8_t status;
uint16_t recvBits;
uint8_t i;
uint8_t buff[18];
buff[0] = PICC_WRITE;
buff[1] = blockAddr;
CalulateCRC(buff, 2, &buff[2]);
status = MFRC522_ToCard(PCD_TRANSCEIVE, buff, 4, buff, &recvBits);
if((status == MI_OK) && (recvBits == 4) && ((buff[0] & 0x0F) == 0x0A))
{
// 写入16字节数据
for(i=0; i<16; i++)
{
buff[i] = writeData[i];
}
CalulateCRC(buff, 16, &buff[16]);
status = MFRC522_ToCard(PCD_TRANSCEIVE, buff, 18, buff, &recvBits);
if((status != MI_OK) || (recvBits != 4) || ((buff[0] & 0x0F) != 0x0A))
{
status = MI_ERR;
}
}
else
{
status = MI_ERR;
}
return status;
}
/************************ 休眠卡 ************************/
void MFRC522_Halt(void)
{
uint16_t unLen;
uint8_t buff[4];
buff[0] = PICC_HALT;
buff[1] = 0;
CalulateCRC(buff, 2, &buff[2]);
MFRC522_ToCard(PCD_TRANSCEIVE, buff, 4, buff, &unLen);
}
main.c
#include "stm32f4xx.h"
#include "MFRC522.h"
#include <stdio.h>
#include <string.h>
/************************ 微秒延时函数 ************************/
void delay_us(u32 nus)
{
u32 reload = 0;
// 关闭Systick定时器
SysTick->CTRL = 0;
// 计算重装载值:nus * 21(21MHz时钟,1μs计数21次)
reload = nus * 21;
// 设置重装载值(最大不超过16777215)
SysTick->LOAD = reload > 0xFFFFFF ? 0xFFFFFF : reload;
// 清零当前值和COUNTFLAG位
SysTick->VAL = 0;
// 使能Systick,选择外部时钟源(CLKSOURCE=0),不产生中断(TICKINT=0)
SysTick->CTRL = 1;
// 等待计数完成(COUNTFLAG=1)
while(!(SysTick->CTRL & (1 << 16)));
// 关闭Systick定时器
SysTick->CTRL = 0;
}
/************************ 毫秒延时函数 ************************/
void delay_ms(u32 nms)
{
while(nms--)
{
delay_us(1000); // 每次延时1000μs(1ms)
}
}
/************************ USART1初始化 ************************/
void USART1_Init(uint32_t baudrate)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
// 使能时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
// 配置PA9(TX)、PA10(RX)为复用功能
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
// TX引脚:推挽复用输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStruct);
// RX引脚:浮空输入
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStruct);
// 配置USART1
USART_InitStruct.USART_BaudRate = baudrate;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStruct);
// 使能USART1
USART_Cmd(USART1, ENABLE);
}
/************************ 主函数 ************************/
int main(void)
{
uint8_t status;
uint8_t card_type[2]; // 卡类型
uint8_t card_id[5]; // 卡号(4字节+1字节校验)
// 1. 系统初始化
USART1_Init(115200); // 串口1初始化(用于打印)
MFRC522_Init(); // MFRC522初始化
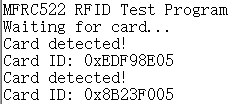
printf("MFRC522 RFID Test Program\r\n");
printf("Waiting for card...\r\n");
// 2. 主循环
while(1)
{
// 寻卡(寻所有卡)
status = MFRC522_Request(PICC_REQALL, card_type);
if(status == MI_OK) // 检测到卡片
{
printf("Card detected!\r\n");
// 防冲突,读取卡号
status = MFRC522_Anticoll(card_id);
if(status == MI_OK)
{
// 打印卡号(十六进制)
printf("Card ID: 0x%02X%02X%02X%02X\r\n",
card_id[0], card_id[1], card_id[2], card_id[3]);
// 选卡(可选,选中后可进行读写操作)
MFRC522_SelectTag(card_id);
// 休眠卡(可选,休眠后需重新寻卡)
MFRC522_Halt();
}
else
{
printf("Anticoll error!\r\n");
}
}
else if(status == MI_NOTAGERR)
{
// 无卡(无需打印,避免刷屏)
}
delay_ms(500); // 延时500ms,降低扫描频率
}
}
/************************ 重定向fputc到串口 ************************/
int fputc(int ch, FILE *f)
{
// 等待发送缓冲区为空
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
// 发送字符
USART_SendData(USART1, (uint8_t)ch);
return ch;
}
程序移植步骤(以MFRC522为例)
下载源码
获取 MFRC522 参考代码包,核心文件为 MFRC522.c(驱动实现)和 MFRC522.h(头文件声明)。
分析源码
- 主函数流程
- 核心函数(底层)
移植文件
将 MFRC522.c 和 MFRC522.h 复制到项目 HARDWARE 文件夹中。
添加驱动
在 MDK 中通过「Manage Project Items」,将 MFRC522.c 添加到「HARDWARE」分组。
配置路径
在项目选项「C/C++」的「Include Paths」中,添加 MFRC522.h 所在文件夹路径,确保编译器能识别头文件。
编译工程(头文件依赖检查)
首次编译,验证头文件引用是否正确,解决依赖缺失问题。
底层适配
- 管脚适配:修改
MFRC522.h中 SPI 信号线对应的 MCU 引脚定义(如 SCK 对应 GPIOB_Pin_3); - 时序适配:根据所选 SPI 工作模式(如模式 0),调整 IO 口电平变化时序(时钟边沿、数据采样时机)。
编译工程(语法检查)
二次编译,修正代码语法错误、引脚定义错误等。
观察结果
下载程序到开发板,通过 LCD 显示、串口打印等方式,观察卡片 ID 读取、数据读写等结果。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号