解码线程调度与信号响应
Linux 线程调度策略
调度核心概念
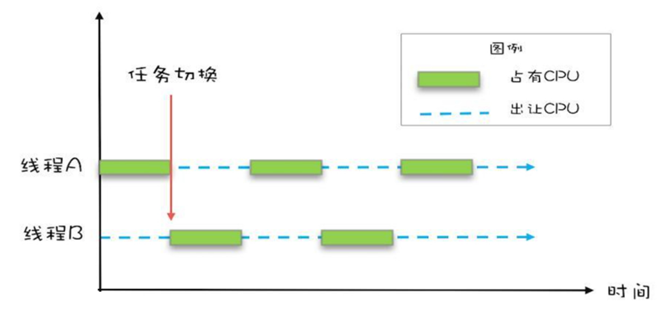
线程是 Linux 系统调度的最小单位,进程作为线程的容器,可包含一个或多个线程。Linux 内核采用抢占式调度机制:高优先级线程可抢占正在运行的低优先级线程的 CPU 使用权;

同优先级线程则通过时间片轮转方式并发执行,每个线程执行固定时间后切换,实现多任务并行效果。
优先级分类
静态优先级
静态优先级是线程的固有属性,设置后不可更改,范围为 0~99,数值越大优先级越高。
- 普通任务:静态优先级固定为 0,无法与系统任务竞争资源,仅能与其他普通任务通过动态优先级竞争。
- 系统任务:静态优先级范围为 1~99,优先级高于普通任务,可随时抢占普通任务的 CPU 资源。
- 继承调度属性控制:通过
pthread_attr_setinheritsched()和pthread_attr_getinheritsched()函数设置 / 获取线程继承属性,决定线程是否继承创建线程的调度属性。
#include <pthread.h>
/**
* @brief 设置线程属性对象的继承调度属性
* @param attr 线程属性对象指针,需先通过pthread_attr_init()初始化
* @param inheritsched 继承策略:PTHREAD_INHERIT_SCHED(继承创建线程属性,忽略attr中调度属性)、PTHREAD_EXPLICIT_SCHED(使用attr中指定的调度属性)
* @return 成功返回0,失败返回非零错误码
*/
int pthread_attr_setinheritsched(pthread_attr_t *attr, int inheritsched);
/**
* @brief 获取线程属性对象的继承调度属性
* @param attr 已初始化的线程属性对象指针
* @param inheritsched 用于存储获取到的继承策略的指针
* @return 成功返回0,失败返回非零错误码
*/
int pthread_attr_getinheritsched(const pthread_attr_t *attr, int *inheritsched);
动态优先级
动态优先级通过调整线程的 nice 值实现,系统会根据线程运行行为自动调整:
- IO 消耗性任务:睡眠时间长、资源占用少,系统会逐步提高其优先级(降低 nice 值)。
- CPU 消耗性任务:睡眠时间短、资源抢占频繁,系统会逐步降低其优先级(提高 nice 值)。
- nice 值范围:-20~19,值越小优先级越高,默认值为 0;降低 nice 值(提高优先级)需 root 权限。
- 手动调整函数:
nice()函数用于修改进程(含所有线程)的 nice 值,对 SCHED_FIFO 和 SCHED_RR 策略的实时线程无效。
#include <unistd.h>
/**
* @brief 修改调用进程的nice值,间接调整动态优先级
* @param incr 要添加到当前nice值的增量,正数提高nice值(降低优先级),负数降低nice值(提高优先级)
* @return 成功返回新的nice值 - NZER0,失败返回-1(需检查errno判断是否真的出错)
* @note 仅对普通任务有效,实时任务(SCHED_FIFO/SCHED_RR)无影响;降低nice值需root权限
* @warning nice值范围被限制在0~2*(NZER0)-1,超出范围会被截断到对应上限/下限
*/
int nice(int incr);
三种调度策略
SCHED_OTHER(分时调度策略)
- 默认调度策略,采用 CFS(完全公平调度器)算法,为每个线程维护虚拟时钟 vruntime。
- 调度逻辑:线程执行时 vruntime 递增,调度器始终选择 vruntime 最小的线程执行;高优先级线程 vruntime 增长慢,获得更多运行机会。
- 限制:静态优先级必须设为 0,对应普通任务。
SCHED_FIFO(实时先到先服务策略)
- 实时调度策略,按线程就绪顺序执行,线程一旦运行,直到被更高优先级线程抢占、主动放弃 CPU 或任务完成才释放控制权。
- 同优先级特性:无时间片限制,高优先级线程运行时,同优先级线程无法抢占,实现资源互斥。
- 优先级范围:1~99,需 root 权限运行。
SCHED_RR(实时轮询调度策略)
- 实时调度策略,基于时间片轮转,为每个线程分配固定时间片,超时后自动交出 CPU 控制权。
- 调度逻辑:线程运行至时间片耗尽、被高优先级抢占或主动放弃 CPU 时切换,内核按 FIFO 规则选择下一个就绪线程。
- 优势:避免单个线程长期占用资源;缺点:任务切换频繁,增加上下文切换开销。
- 优先级范围:1~99,需 root 权限运行。
调度策略设置函数
通过pthread_attr_setschedpolicy()和pthread_attr_getschedpolicy()函数设置 / 获取线程调度策略,需配合 PTHREAD_EXPLICIT_SCHED 继承属性才能生效。
#include <pthread.h>
/**
* @brief 设置线程属性对象的调度策略
* @param attr 线程属性对象指针,需已初始化
* @param policy 调度策略,支持SCHED_OTHER、SCHED_FIFO、SCHED_RR三种
* @return 成功返回0,失败返回非零错误码(如EINVAL表示policy值无效)
* @note 必须先通过pthread_attr_setinheritsched()设置为PTHREAD_EXPLICIT_SCHED,否则策略设置无效
*/
int pthread_attr_setschedpolicy(pthread_attr_t *attr, int policy);
/**
* @brief 获取线程属性对象的调度策略
* @param attr 已初始化的线程属性对象指针
* @param policy 用于存储获取到的调度策略的指针
* @return 成功返回0,失败返回非零错误码
*/
int pthread_attr_getschedpolicy(const pthread_attr_t *attr, int *policy);
静态优先级设置函数
通过pthread_attr_setschedparam()和pthread_attr_getschedparam()函数设置 / 获取线程静态优先级,需配合 PTHREAD_EXPLICIT_SCHED 继承属性。
#include <pthread.h>
/**
* @brief 设置线程属性对象的调度参数(主要是静态优先级)
* @param attr 线程属性对象指针,需已初始化
* @param param 调度参数结构体指针,其中sched_priority成员指定静态优先级
* @return 成功返回0,失败返回非零错误码
* @note 需先设置继承属性为PTHREAD_EXPLICIT_SCHED,否则参数设置无效
* @note SCHED_OTHER策略下,sched_priority必须设为0;SCHED_FIFO/SCHED_RR策略下,范围为1~99
*/
int pthread_attr_setschedparam(pthread_attr_t *attr, const struct sched_param *param);
/**
* @brief 获取线程属性对象的调度参数
* @param attr 已初始化的线程属性对象指针
* @param param 用于存储调度参数的结构体指针,会填充当前的sched_priority值
* @return 成功返回0,失败返回非零错误码
*/
int pthread_attr_getschedparam(const pthread_attr_t *attr, struct sched_param *param);
// 调度参数结构体定义
struct sched_param {
int sched_priority; // 线程静态优先级
};
实操代码示例
创建 SCHED_FIFO 策略线程
#include <pthread.h>
#include <stdio.h>
void *task(void *arg) {
// 线程任务逻辑
while (1);
return NULL;
}
int main(int argc, char const *argv[]) {
pthread_attr_t attr;
pthread_t thread;
struct sched_param param;
// 初始化线程属性对象
pthread_attr_init(&attr);
// 设置继承策略为不继承,使用attr中的调度属性
pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
// 设置调度策略为SCHED_FIFO
pthread_attr_setschedpolicy(&attr, SCHED_FIFO);
// 设置静态优先级为50(1~99范围)
param.sched_priority = 50;
pthread_attr_setschedparam(&attr, ¶m);
// 创建线程
pthread_create(&thread, &attr, task, NULL);
// 主线程死循环,防止程序退出
while (1);
return 0;
}
同优先级 SCHED_FIFO 多线程示例
#include <pthread.h>
#include <stdio.h>
#include <unistd.h>
// 线程1:输出0~9
void *thread_num(void *arg) {
while (1) {
for (int i = 0; i < 10; i++) {
printf("%d ", i);
}
}
return NULL;
}
// 线程2:输出a~z
void *thread_char(void *arg) {
while (1) {
for (char c = 'a'; c <= 'z'; c++) {
printf("%c ", c);
}
}
return NULL;
}
int main() {
pthread_attr_t attr;
pthread_t t1, t2;
struct sched_param param;
// 初始化属性对象
pthread_attr_init(&attr);
// 设置不继承调度属性
pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
// 设置SCHED_FIFO策略
pthread_attr_setschedpolicy(&attr, SCHED_FIFO);
// 设置相同优先级50
param.sched_priority = 50;
pthread_attr_setschedparam(&attr, ¶m);
// 创建两个线程
pthread_create(&t1, &attr, thread_num, NULL);
pthread_create(&t2, &attr, thread_char, NULL);
// 等待线程(此处用死循环替代)
while (1);
return 0;
}
Linux 线程信号响应
信号响应规则
进程收到信号时,默认由任意就绪线程响应,存在不确定性。实际开发中可指定特定线程处理信号,其他线程屏蔽该信号,确保信号处理逻辑可控。
信号发送函数
pthread_kill ():向指定线程发送信号
#include <signal.h>
#include <pthread.h>
/**
* @brief 向同一进程中的指定线程发送信号
* @param thread 目标线程的ID(pthread_t类型)
* @param sig 要发送的信号编号(如SIGINT、SIGUSR1等,0表示仅做错误检查不发送信号)
* @return 成功返回0,失败返回非零错误码(如EINVAL表示信号无效)
* @note 信号是异步定向到目标线程,信号处理动作(如终止、暂停)影响整个进程
*/
int pthread_kill(pthread_t thread, int sig);
pthread_sigqueue ():向指定线程发送信号并附带数据
#include <signal.h>
#include <pthread.h>
/**
* @brief 向同一进程中的指定线程发送信号,并附带数据
* @param thread 目标线程的ID
* @param sig 要发送的信号编号
* @param value 附带的数据,union sigval类型(包含int sival_int或void *sival_ptr)
* @return 成功返回0,失败返回非零错误码
* @note 需定义_GNU_SOURCE宏才能使用,数据传递需确保线程间内存可访问
*/
int pthread_sigqueue(pthread_t thread, int sig, const union sigval value);
// 信号附带数据的联合体定义
union sigval {
int sival_int; // 整数类型数据
void *sival_ptr; // 指针类型数据
};
线程信号屏蔽函数
通过pthread_sigmask()函数屏蔽指定信号,避免线程响应不需要处理的信号,与sigprocmask()功能一致,但更适用于多线程环境(POSIX 标准指定)。
#include <signal.h>
/**
* @brief 检查并修改线程的信号屏蔽集
* @param how 信号屏蔽方式:SIG_BLOCK(添加信号到屏蔽集)、SIG_UNBLOCK(从屏蔽集移除信号)、SIG_SETMASK(设置屏蔽集为指定集合)
* @param set 新的信号屏蔽集指针(NULL表示不修改屏蔽集,仅获取当前屏蔽集)
* @param oldset 用于存储旧信号屏蔽集的指针(NULL表示不需要保存旧屏蔽集)
* @return 成功返回0,失败返回非零错误码
* @note 屏蔽信号仅对当前线程有效,其他线程不受影响
*/
int pthread_sigmask(int how, const sigset_t *set, sigset_t *oldset);
实操代码示例(指定线程处理信号)
#include <pthread.h>
#include <signal.h>
#include <stdio.h>
#include <unistd.h>
// 信号处理函数:输出处理线程的ID
void sigint_handler(int sig) {
printf("处理SIGINT信号的线程ID:%lu\n", pthread_self());
}
// 线程A:处理SIGINT信号
void *thread_a(void *arg) {
// 设置SIGINT信号的处理函数
signal(SIGINT, sigint_handler);
// 线程A持续运行,等待信号
while (1) {
sleep(1);
}
return NULL;
}
// 线程B:屏蔽SIGINT信号
void *thread_b(void *arg) {
sigset_t set;
// 初始化信号集并添加SIGINT信号
sigemptyset(&set);
sigaddset(&set, SIGINT);
// 屏蔽SIGINT信号
pthread_sigmask(SIG_BLOCK, &set, NULL);
// 线程B持续运行,不响应SIGINT
while (1) {
sleep(1);
}
return NULL;
}
// 线程C:屏蔽SIGINT信号(与线程B逻辑一致)
void *thread_c(void *arg) {
sigset_t set;
sigemptyset(&set);
sigaddset(&set, SIGINT);
pthread_sigmask(SIG_BLOCK, &set, NULL);
while (1) {
sleep(1);
}
return NULL;
}
int main() {
pthread_t ta, tb, tc;
// 创建三个线程
pthread_create(&ta, NULL, thread_a, NULL);
pthread_create(&tb, NULL, thread_b, NULL);
pthread_create(&tc, NULL, thread_c, NULL);
// 等待线程结束(此处用死循环替代)
while (1) {
sleep(1);
}
return 0;
}
说明
- 信号处理函数需保持简洁,避免耗时操作,否则可能影响线程调度和其他信号处理。
- 线程间信号屏蔽相互独立,一个线程屏蔽的信号不影响其他线程对该信号的响应。
- 实时信号(SIGRTMIN~SIGRTMAX)支持排队,普通信号不支持,多次发送可能丢失。
扩展代码示例(线程与 CPU 核绑定)
通过sched_setaffinity()函数将线程绑定到指定 CPU 核,提高多核处理器利用率,减少线程切换开销。
// 必须在包含任何头文件前定义_GNU_SOURCE,启用sched_getcpu()等GNU扩展函数
#define _GNU_SOURCE
#include <sched.h> // 包含CPU_ZERO/CPU_SET/sched_setaffinity/sched_getcpu的声明
#include <pthread.h> // 包含pthread_self/pthread_create等线程函数
#include <stdio.h> // 包含printf
#include <errno.h> // 包含errno(错误码)
#include <string.h> // 包含strerror(打印错误信息)
#include <unistd.h> // 包含sleep(可选,用于测试)
// 线程函数:绑定CPU核并输出信息
void *task(void *arg) {
cpu_set_t cpuset; // 存储CPU亲和性集合的结构体
int target_cpu = 0; // 要绑定的CPU核(0表示第一个核,多核系统可改1/2等)
// 初始化CPU集合(清空集合,避免垃圾值)
CPU_ZERO(&cpuset);
// 将目标CPU核加入集合(这里绑定到CPU 0)
CPU_SET(target_cpu, &cpuset);
// 设置当前线程的CPU亲和性(绑定到指定核)
// 参数1:0表示“当前线程”(若传线程ID,需用gettid(),但pthread_t不直接对应tid)
// 参数2:CPU集合的大小(字节数)
// 参数3:CPU集合指针(包含要绑定的核)
if (sched_setaffinity(0, sizeof(cpuset), &cpuset) == -1) {
fprintf(stderr, "绑定CPU失败:%s(可能需要root权限)\n", strerror(errno));
pthread_exit(NULL); // 线程退出
}
// 验证绑定结果:获取当前线程实际运行的CPU核
int current_cpu = sched_getcpu();
if (current_cpu == -1) {
fprintf(stderr, "获取当前CPU核失败:%s\n", strerror(errno));
pthread_exit(NULL);
}
// 输出线程ID和绑定结果(pthread_self()返回线程的pthread_t标识)
printf("线程(pthread ID:%lu)绑定结果:\n", pthread_self());
printf(" 目标CPU核:%d\n", target_cpu);
printf(" 实际运行CPU核:%d\n", current_cpu);
printf(" 绑定成功!\n");
// 保持线程运行(避免线程立即退出,方便观察)
while (1) {
sleep(1); // 每秒休眠一次,降低CPU占用
}
return NULL;
}
int main() {
pthread_t thread;
int ret;
// 创建线程(注意:绑定CPU的操作在子线程内执行,更灵活)
ret = pthread_create(&thread, NULL, task, NULL);
if (ret != 0) {
fprintf(stderr, "创建线程失败:%s\n", strerror(ret));
return 1;
}
// 等待子线程结束(避免主线程提前退出)
pthread_join(thread, NULL);
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号