ROS工程结构(文件系统级)
ROS文件结构图
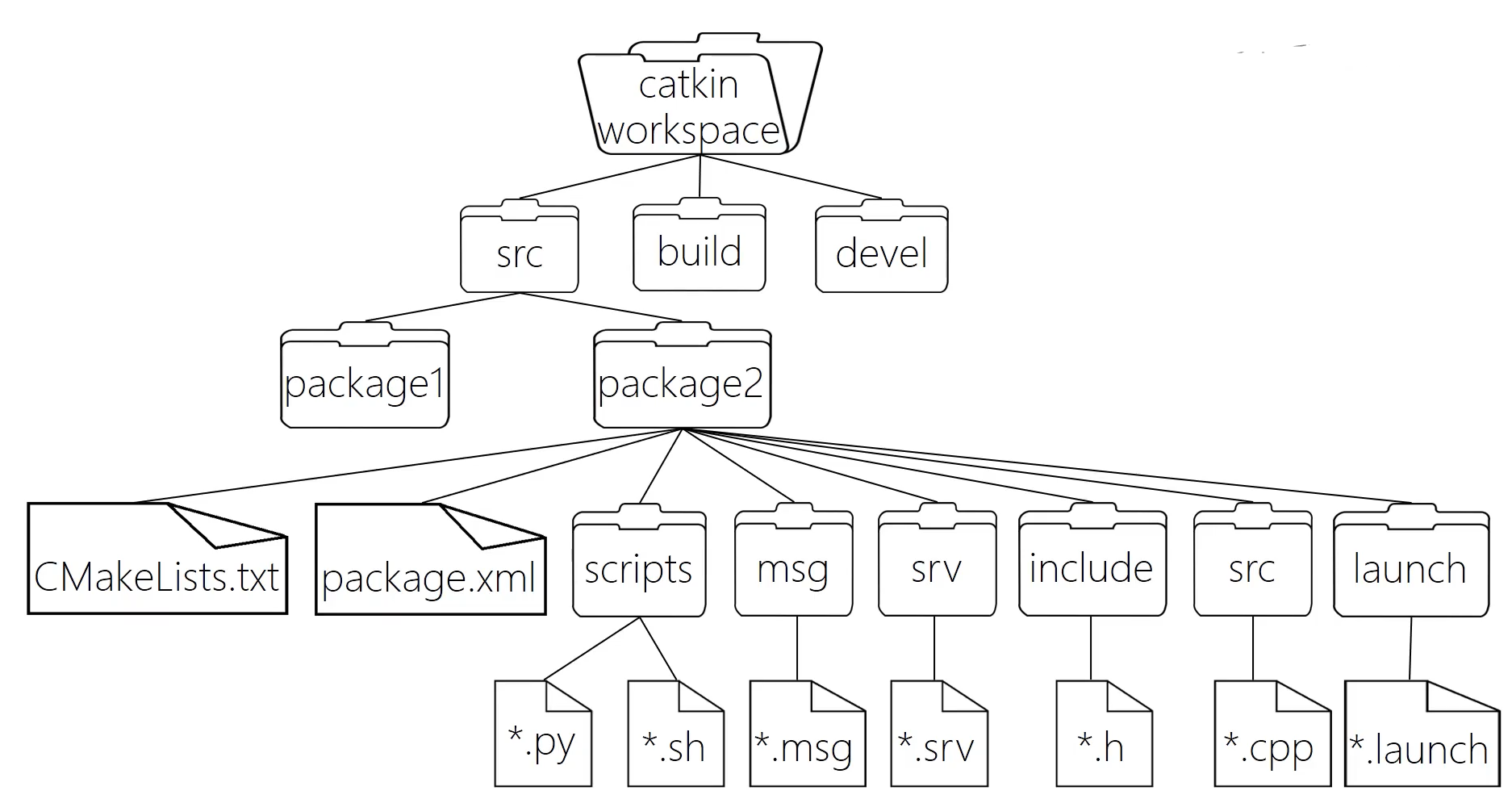
结构解析:
- catkin workplace:管理和组织功能包的文件夹,以catkin工具编译
- src : package源代码(经常使用)——package1(功能包1)
——package2(功能包2)
- build : cmake&catkin缓存和中间文件
-
devel :目标文件,一般存放头文件、动态链接库、静态链接库、可执行文件
-
package(功能包):ROS软件的基本组织形式,catkin编译的基本单元,一个package可以包含多个可执行文件
- CMakeLists.txt : 规定catkin编译的规则,例如源文件、依赖项、目标文件
- package.xml : 定义package的属性,例如包名、版本号、作者、依赖等
- scripts:放置可执行文件的地方,一般为 *.sh(shell文件)和 *.cpp文件
- msg&srv:放置通信格式文件的地方
- include:放置头文件的地方
- launch:放置launch文件的地方
package作用:
存放代码文件,一般有两种文件格式 ------脚本(shell、python)
------C++(头文件、源文件)
存放自定义通信格式 ------消息(msg)
------服务(srv)
------动作(action)
存放launch以及配置文件 ------launch文件(launch)
------配置文件(yaml)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号