AT24C02(I2C总线)
AT24C02(I2C总线)
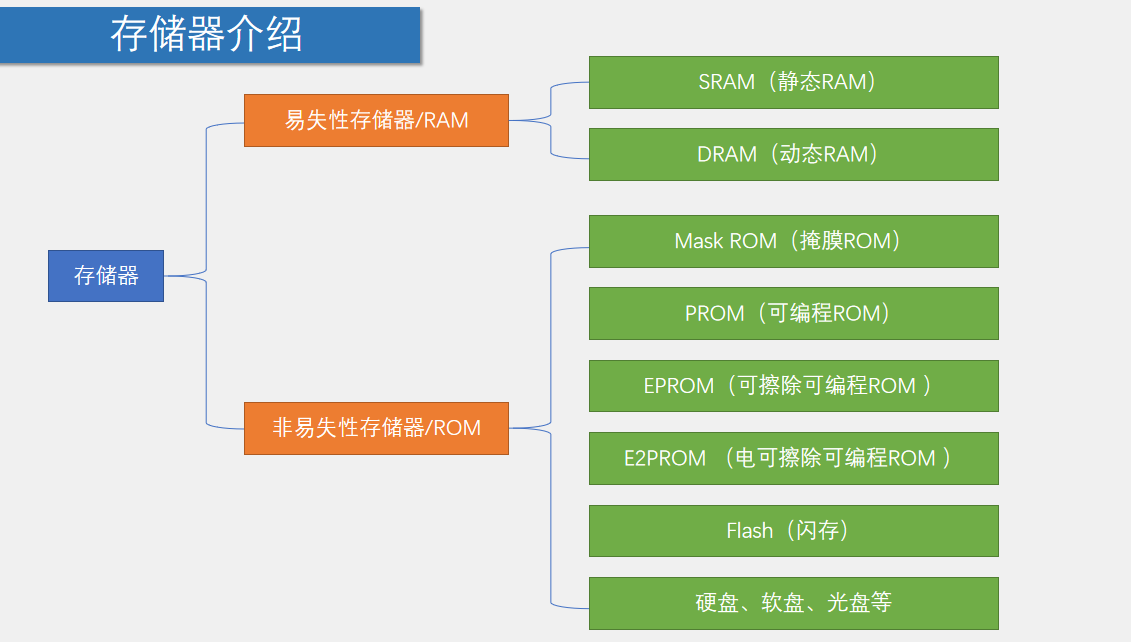
存储器分类:从易失性到非易失性,一文读懂存储技术
最近在整理计算机组成原理的笔记,正好翻到这张经典的存储器分类图,觉得非常清晰易懂,于是拿出来和大家分享一下。这张图虽然简单,却涵盖了从内存到外存、从易失到非易失的各类存储器,是理解计算机存储体系的基础。
易失性存储器(RAM)
易失性存储器指的是断电后数据会丢失的存储设备,主要用于计算机的内存。
1. SRAM(静态RAM)
- 速度快、功耗低,但成本高、集成度低。
- 常用于CPU缓存(L1、L2、L3 Cache)。
2. DRAM(动态RAM)
- 需要定期刷新来保持数据,速度稍慢,但成本低、集成度高。
- 主要用于主内存(如DDR4、DDR5内存条)。
简单理解:SRAM快但贵,DRAM便宜但慢一点。
非易失性存储器(ROM)
非易失性存储器断电后数据不丢失,常用于长期存储数据和程序。
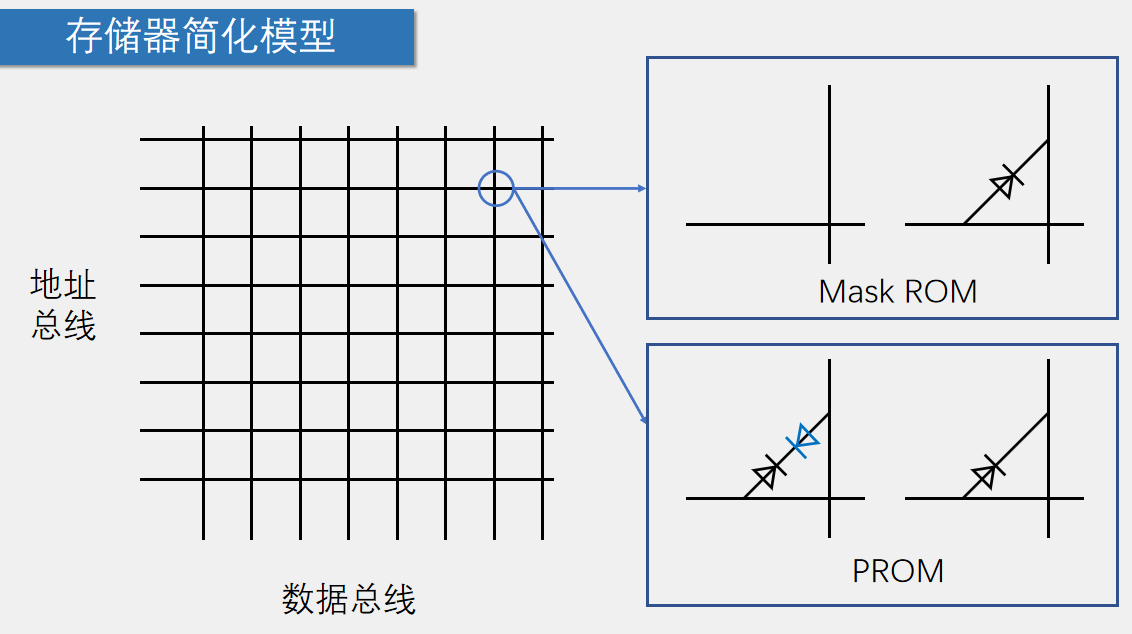
1. Mask ROM(掩膜ROM)
- 出厂时数据已固化,无法修改。
- 适用于大批量生产的固定程序存储。
2. PROM(可编程ROM)
- 用户可编程一次,之后不可更改。
3. EPROM(可擦除可编程ROM)
- 可通过紫外线擦除并重复编程。
4. E²PROM(电可擦除可编程ROM)
- 可通过电信号擦写,无需紫外线,更方便。
- 常用于BIOS芯片、设备配置存储。
5. Flash(闪存)
- 目前最常见,分为NAND Flash和NOR Flash。
- 广泛应用于U盘、SSD、手机存储、SD卡等。
6. 硬盘、软盘、光盘等
- 传统外存设备,容量大、成本低,但速度慢。
- 硬盘仍是最主流的长期存储设备之一。
小结
这张图虽然简洁,却勾勒出存储器技术的演进路径:
- 从易失到非易失,从临时存储到永久存储。
- 从高成本到低成本,从专用设备到普及应用。
- 从低速到高速,存储技术不断推动计算性能提升。
如果你也在学习计算机组成、嵌入式系统或硬件相关的内容,建议收藏这张图,它可以帮助你快速建立存储体系的整体认知。

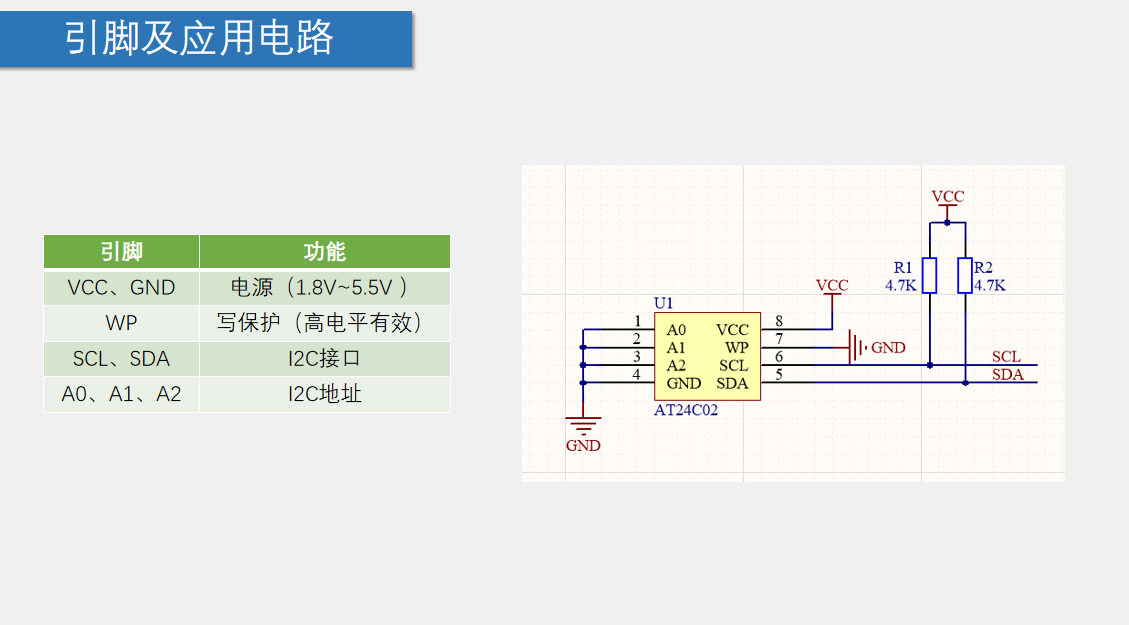

应用实践一:AT24C02数据存储
main.c
#include <REGX52.H>
#include "LCD1602.h"
#include "Key.h"
#include "AT24C02.h"
#include "Delay.h"
unsigned char KeyNum;
unsigned int Num;
void main()
{
LCD_Init();
LCD_ShowNum(1,1,Num,5);
while(1)
{
KeyNum=Key();
if(KeyNum==1) //K1按键,Num自增
{
Num++;
LCD_ShowNum(1,1,Num,5);
}
if(KeyNum==2) //K2按键,Num自减
{
Num--;
LCD_ShowNum(1,1,Num,5);
}
if(KeyNum==3) //K3按键,向AT24C02写入数据
{
AT24C02_WriteByte(0,Num%256);
Delay(5);
AT24C02_WriteByte(1,Num/256);
Delay(5);
LCD_ShowString(2,1,"Write OK");
Delay(1000);
LCD_ShowString(2,1," ");
}
if(KeyNum==4) //K4按键,从AT24C02读取数据
{
Num=AT24C02_ReadByte(0);
Num|=AT24C02_ReadByte(1)<<8;
LCD_ShowNum(1,1,Num,5);
LCD_ShowString(2,1,"Read OK ");
Delay(1000);
LCD_ShowString(2,1," ");
}
}
}
Delay.c
void Delay(unsigned int xms)
{
unsigned char i, j;
while(xms--)
{
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
}
}
Delay.h
#ifndef __DELAY_H__
#define __DELAY_H__
void Delay(unsigned int xms);
#endif
LCD1602.c
#include <REGX52.H>
//引脚配置:
sbit LCD_RS=P2^6;
sbit LCD_RW=P2^5;
sbit LCD_EN=P2^7;
#define LCD_DataPort P0
//函数定义:
/**
* @brief LCD1602延时函数,12MHz调用可延时1ms
* @param 无
* @retval 无
*/
void LCD_Delay()
{
unsigned char i, j;
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
}
/**
* @brief LCD1602写命令
* @param Command 要写入的命令
* @retval 无
*/
void LCD_WriteCommand(unsigned char Command)
{
LCD_RS=0;
LCD_RW=0;
LCD_DataPort=Command;
LCD_EN=1;
LCD_Delay();
LCD_EN=0;
LCD_Delay();
}
/**
* @brief LCD1602写数据
* @param Data 要写入的数据
* @retval 无
*/
void LCD_WriteData(unsigned char Data)
{
LCD_RS=1;
LCD_RW=0;
LCD_DataPort=Data;
LCD_EN=1;
LCD_Delay();
LCD_EN=0;
LCD_Delay();
}
/**
* @brief LCD1602设置光标位置
* @param Line 行位置,范围:1~2
* @param Column 列位置,范围:1~16
* @retval 无
*/
void LCD_SetCursor(unsigned char Line,unsigned char Column)
{
if(Line==1)
{
LCD_WriteCommand(0x80|(Column-1));
}
else if(Line==2)
{
LCD_WriteCommand(0x80|(Column-1+0x40));
}
}
/**
* @brief LCD1602初始化函数
* @param 无
* @retval 无
*/
void LCD_Init()
{
LCD_WriteCommand(0x38);//八位数据接口,两行显示,5*7点阵
LCD_WriteCommand(0x0c);//显示开,光标关,闪烁关
LCD_WriteCommand(0x06);//数据读写操作后,光标自动加一,画面不动
LCD_WriteCommand(0x01);//光标复位,清屏
}
/**
* @brief 在LCD1602指定位置上显示一个字符
* @param Line 行位置,范围:1~2
* @param Column 列位置,范围:1~16
* @param Char 要显示的字符
* @retval 无
*/
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char)
{
LCD_SetCursor(Line,Column);
LCD_WriteData(Char);
}
/**
* @brief 在LCD1602指定位置开始显示所给字符串
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param String 要显示的字符串
* @retval 无
*/
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=0;String[i]!='\0';i++)
{
LCD_WriteData(String[i]);
}
}
/**
* @brief 返回值=X的Y次方
*/
int LCD_Pow(int X,int Y)
{
unsigned char i;
int Result=1;
for(i=0;i<Y;i++)
{
Result*=X;
}
return Result;
}
/**
* @brief 在LCD1602指定位置开始显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~65535
* @param Length 要显示数字的长度,范围:1~5
* @retval 无
*/
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=Length;i>0;i--)
{
LCD_WriteData(Number/LCD_Pow(10,i-1)%10+'0');
}
}
/**
* @brief 在LCD1602指定位置开始以有符号十进制显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:-32768~32767
* @param Length 要显示数字的长度,范围:1~5
* @retval 无
*/
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length)
{
unsigned char i;
unsigned int Number1;
LCD_SetCursor(Line,Column);
if(Number>=0)
{
LCD_WriteData('+');
Number1=Number;
}
else
{
LCD_WriteData('-');
Number1=-Number;
}
for(i=Length;i>0;i--)
{
LCD_WriteData(Number1/LCD_Pow(10,i-1)%10+'0');
}
}
/**
* @brief 在LCD1602指定位置开始以十六进制显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~0xFFFF
* @param Length 要显示数字的长度,范围:1~4
* @retval 无
*/
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{
unsigned char i,SingleNumber;
LCD_SetCursor(Line,Column);
for(i=Length;i>0;i--)
{
SingleNumber=Number/LCD_Pow(16,i-1)%16;
if(SingleNumber<10)
{
LCD_WriteData(SingleNumber+'0');
}
else
{
LCD_WriteData(SingleNumber-10+'A');
}
}
}
/**
* @brief 在LCD1602指定位置开始以二进制显示所给数字
* @param Line 起始行位置,范围:1~2
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~1111 1111 1111 1111
* @param Length 要显示数字的长度,范围:1~16
* @retval 无
*/
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{
unsigned char i;
LCD_SetCursor(Line,Column);
for(i=Length;i>0;i--)
{
LCD_WriteData(Number/LCD_Pow(2,i-1)%2+'0');
}
}
LCD1602.h
#ifndef __LCD1602_H__
#define __LCD1602_H__
//用户调用函数:
void LCD_Init();
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char);
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String);
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length);
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
#endif
Key.c
#include <REGX52.H>
#include "Delay.h"
/**
* @brief 获取独立按键键码
* @param 无
* @retval 按下按键的键码,范围:0~4,无按键按下时返回值为0
*/
unsigned char Key()
{
unsigned char KeyNumber=0;
if(P3_1==0){Delay(20);while(P3_1==0);Delay(20);KeyNumber=1;}
if(P3_0==0){Delay(20);while(P3_0==0);Delay(20);KeyNumber=2;}
if(P3_2==0){Delay(20);while(P3_2==0);Delay(20);KeyNumber=3;}
if(P3_3==0){Delay(20);while(P3_3==0);Delay(20);KeyNumber=4;}
return KeyNumber;
}
Key.h
#ifndef __KEY_H__
#define __KEY_H__
unsigned char Key();
#endif
AT24C02.c
#include <REGX52.H>
#include "I2C.h"
#define AT24C02_ADDRESS 0xA0
/**
* @brief AT24C02写入一个字节
* @param WordAddress 要写入字节的地址
* @param Data 要写入的数据
* @retval 无
*/
void AT24C02_WriteByte(unsigned char WordAddress,Data)
{
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_SendByte(Data);
I2C_ReceiveAck();
I2C_Stop();
}
/**
* @brief AT24C02读取一个字节
* @param WordAddress 要读出字节的地址
* @retval 读出的数据
*/
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{
unsigned char Data;
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS|0x01);
I2C_ReceiveAck();
Data=I2C_ReceiveByte();
I2C_SendAck(1);
I2C_Stop();
return Data;
}
AT24C02.h
#ifndef __AT24C02_H__
#define __AT24C02_H__
void AT24C02_WriteByte(unsigned char WordAddress,Data);
unsigned char AT24C02_ReadByte(unsigned char WordAddress);
#endif
I2C.c
#include <REGX52.H>
sbit I2C_SCL=P2^1;
sbit I2C_SDA=P2^0;
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void I2C_Start(void)
{
I2C_SDA=1;
I2C_SCL=1;
I2C_SDA=0;
I2C_SCL=0;
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void I2C_Stop(void)
{
I2C_SDA=0;
I2C_SCL=1;
I2C_SDA=1;
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的字节
* @retval 无
*/
void I2C_SendByte(unsigned char Byte)
{
unsigned char i;
for(i=0;i<8;i++)
{
I2C_SDA=Byte&(0x80>>i);
I2C_SCL=1;
I2C_SCL=0;
}
}
/**
* @brief I2C接收一个字节
* @param 无
* @retval 接收到的一个字节数据
*/
unsigned char I2C_ReceiveByte(void)
{
unsigned char i,Byte=0x00;
I2C_SDA=1;
for(i=0;i<8;i++)
{
I2C_SCL=1;
if(I2C_SDA){Byte|=(0x80>>i);}
I2C_SCL=0;
}
return Byte;
}
/**
* @brief I2C发送应答
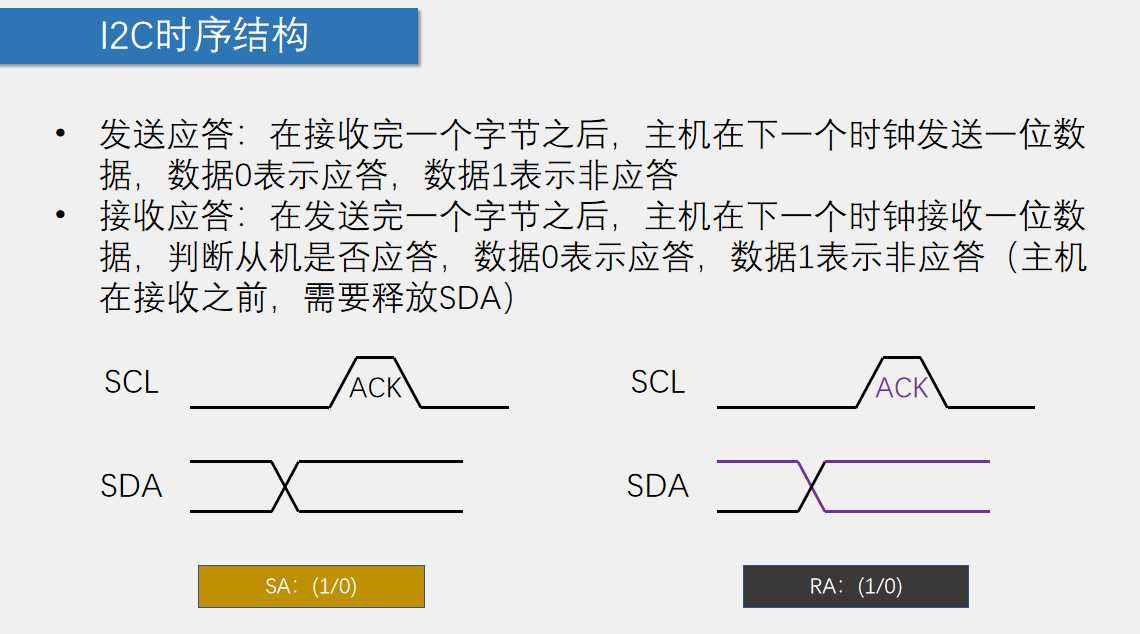
* @param AckBit 应答位,0为应答,1为非应答
* @retval 无
*/
void I2C_SendAck(unsigned char AckBit)
{
I2C_SDA=AckBit;
I2C_SCL=1;
I2C_SCL=0;
}
/**
* @brief I2C接收应答位
* @param 无
* @retval 接收到的应答位,0为应答,1为非应答
*/
unsigned char I2C_ReceiveAck(void)
{
unsigned char AckBit;
I2C_SDA=1;
I2C_SCL=1;
AckBit=I2C_SDA;
I2C_SCL=0;
return AckBit;
}
I2C.h
#ifndef __I2C_H__
#define __I2C_H__
void I2C_Start(void);
void I2C_Stop(void);
void I2C_SendByte(unsigned char Byte);
unsigned char I2C_ReceiveByte(void);
void I2C_SendAck(unsigned char AckBit);
unsigned char I2C_ReceiveAck(void);
#endif
应用实践二:秒表(定时器扫描按键数码管)
main.c
#include <REGX52.H>
#include "Timer0.h"
#include "Key.h"
#include "Nixie.h"
#include "Delay.h"
#include "AT24C02.h"
unsigned char KeyNum;
unsigned char Min,Sec,MiniSec;
unsigned char RunFlag;
void main()
{
Timer0_Init();
while(1)
{
KeyNum=Key();
if(KeyNum==1) //K1按键按下
{
RunFlag=!RunFlag; //启动标志位翻转
}
if(KeyNum==2) //K2按键按下
{
Min=0; //分秒清0
Sec=0;
MiniSec=0;
}
if(KeyNum==3) //K3按键按下
{
AT24C02_WriteByte(0,Min); //将分秒写入AT24C02
Delay(5);
AT24C02_WriteByte(1,Sec);
Delay(5);
AT24C02_WriteByte(2,MiniSec);
Delay(5);
}
if(KeyNum==4) //K4按键按下
{
Min=AT24C02_ReadByte(0); //读出AT24C02数据
Sec=AT24C02_ReadByte(1);
MiniSec=AT24C02_ReadByte(2);
}
Nixie_SetBuf(1,Min/10); //设置显示缓存,显示数据
Nixie_SetBuf(2,Min%10);
Nixie_SetBuf(3,11);
Nixie_SetBuf(4,Sec/10);
Nixie_SetBuf(5,Sec%10);
Nixie_SetBuf(6,11);
Nixie_SetBuf(7,MiniSec/10);
Nixie_SetBuf(8,MiniSec%10);
}
}
/**
* @brief 秒表驱动函数,在中断中调用
* @param 无
* @retval 无
*/
void Sec_Loop(void)
{
if(RunFlag)
{
MiniSec++;
if(MiniSec>=100)
{
MiniSec=0;
Sec++;
if(Sec>=60)
{
Sec=0;
Min++;
if(Min>=60)
{
Min=0;
}
}
}
}
}
void Timer0_Routine() interrupt 1
{
static unsigned int T0Count1,T0Count2,T0Count3;
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
T0Count1++;
if(T0Count1>=20)
{
T0Count1=0;
Key_Loop(); //20ms调用一次按键驱动函数
}
T0Count2++;
if(T0Count2>=2)
{
T0Count2=0;
Nixie_Loop();//2ms调用一次数码管驱动函数
}
T0Count3++;
if(T0Count3>=10)
{
T0Count3=0;
Sec_Loop(); //10ms调用一次数秒表驱动函数
}
}
Delay.c
void Delay(unsigned int xms)
{
unsigned char i, j;
while(xms--)
{
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
}
}
Delay.h
#ifndef __DELAY_H__
#define __DELAY_H__
void Delay(unsigned int xms);
#endif
Nixie.c
#include <REGX52.H>
#include "Delay.h"
//数码管显示缓存区
unsigned char Nixie_Buf[9]={0,10,10,10,10,10,10,10,10};
//数码管段码表
unsigned char NixieTable[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x00,0x40};
/**
* @brief 设置显示缓存区
* @param Location 要设置的位置,范围:1~8
* @param Number 要设置的数字,范围:段码表索引范围
* @retval 无
*/
void Nixie_SetBuf(unsigned char Location,Number)
{
Nixie_Buf[Location]=Number;
}
/**
* @brief 数码管扫描显示
* @param Location 要显示的位置,范围:1~8
* @param Number 要显示的数字,范围:段码表索引范围
* @retval 无
*/
void Nixie_Scan(unsigned char Location,Number)
{
P0=0x00; //段码清0,消影
switch(Location) //位码输出
{
case 1:P2_4=1;P2_3=1;P2_2=1;break;
case 2:P2_4=1;P2_3=1;P2_2=0;break;
case 3:P2_4=1;P2_3=0;P2_2=1;break;
case 4:P2_4=1;P2_3=0;P2_2=0;break;
case 5:P2_4=0;P2_3=1;P2_2=1;break;
case 6:P2_4=0;P2_3=1;P2_2=0;break;
case 7:P2_4=0;P2_3=0;P2_2=1;break;
case 8:P2_4=0;P2_3=0;P2_2=0;break;
}
P0=NixieTable[Number]; //段码输出
}
/**
* @brief 数码管驱动函数,在中断中调用
* @param 无
* @retval 无
*/
void Nixie_Loop(void)
{
static unsigned char i=1;
Nixie_Scan(i,Nixie_Buf[i]);
i++;
if(i>=9){i=1;}
}
Nixie.h
#ifndef __NIXIE_H__
#define __NIXIE_H__
void Nixie_SetBuf(unsigned char Location,Number);
void Nixie_Scan(unsigned char Location,Number);
void Nixie_Loop(void);
#endif
Key.c
#include <REGX52.H>
#include "Delay.h"
unsigned char Key_KeyNumber;
/**
* @brief 获取按键键码
* @param 无
* @retval 按下按键的键码,范围:0,1~4,0表示无按键按下
*/
unsigned char Key(void)
{
unsigned char Temp=0;
Temp=Key_KeyNumber;
Key_KeyNumber=0;
return Temp;
}
/**
* @brief 获取当前按键的状态,无消抖及松手检测
* @param 无
* @retval 按下按键的键码,范围:0,1~4,0表示无按键按下
*/
unsigned char Key_GetState()
{
unsigned char KeyNumber=0;
if(P3_1==0){KeyNumber=1;}
if(P3_0==0){KeyNumber=2;}
if(P3_2==0){KeyNumber=3;}
if(P3_3==0){KeyNumber=4;}
return KeyNumber;
}
/**
* @brief 按键驱动函数,在中断中调用
* @param 无
* @retval 无
*/
void Key_Loop(void)
{
static unsigned char NowState,LastState;
LastState=NowState; //按键状态更新
NowState=Key_GetState(); //获取当前按键状态
//如果上个时间点按键按下,这个时间点未按下,则是松手瞬间,以此避免消抖和松手检测
if(LastState==1 && NowState==0)
{
Key_KeyNumber=1;
}
if(LastState==2 && NowState==0)
{
Key_KeyNumber=2;
}
if(LastState==3 && NowState==0)
{
Key_KeyNumber=3;
}
if(LastState==4 && NowState==0)
{
Key_KeyNumber=4;
}
}
Key.h
#ifndef __KEY_H__
#define __KEY_H__
unsigned char Key(void);
void Key_Loop(void);
#endif
Timer0.c
#include <REGX52.H>
/**
* @brief 定时器0初始化,1毫秒@12.000MHz
* @param 无
* @retval 无
*/
void Timer0_Init(void)
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0=1;
EA=1;
PT0=0;
}
/*定时器中断函数模板
void Timer0_Routine() interrupt 1
{
static unsigned int T0Count;
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
T0Count++;
if(T0Count>=1000)
{
T0Count=0;
}
}
*/
Timer0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__
void Timer0_Init(void);
#endif
AT24C02.c
#include <REGX52.H>
#include "I2C.h"
#define AT24C02_ADDRESS 0xA0
/**
* @brief AT24C02写入一个字节
* @param WordAddress 要写入字节的地址
* @param Data 要写入的数据
* @retval 无
*/
void AT24C02_WriteByte(unsigned char WordAddress,Data)
{
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_SendByte(Data);
I2C_ReceiveAck();
I2C_Stop();
}
/**
* @brief AT24C02读取一个字节
* @param WordAddress 要读出字节的地址
* @retval 读出的数据
*/
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{
unsigned char Data;
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS|0x01);
I2C_ReceiveAck();
Data=I2C_ReceiveByte();
I2C_SendAck(1);
I2C_Stop();
return Data;
}
AT24C02.h
#ifndef __AT24C02_H__
#define __AT24C02_H__
void AT24C02_WriteByte(unsigned char WordAddress,Data);
unsigned char AT24C02_ReadByte(unsigned char WordAddress);
#endif
I2C.c
#include <REGX52.H>
sbit I2C_SCL=P2^1;
sbit I2C_SDA=P2^0;
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void I2C_Start(void)
{
I2C_SDA=1;
I2C_SCL=1;
I2C_SDA=0;
I2C_SCL=0;
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void I2C_Stop(void)
{
I2C_SDA=0;
I2C_SCL=1;
I2C_SDA=1;
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的字节
* @retval 无
*/
void I2C_SendByte(unsigned char Byte)
{
unsigned char i;
for(i=0;i<8;i++)
{
I2C_SDA=Byte&(0x80>>i);
I2C_SCL=1;
I2C_SCL=0;
}
}
/**
* @brief I2C接收一个字节
* @param 无
* @retval 接收到的一个字节数据
*/
unsigned char I2C_ReceiveByte(void)
{
unsigned char i,Byte=0x00;
I2C_SDA=1;
for(i=0;i<8;i++)
{
I2C_SCL=1;
if(I2C_SDA){Byte|=(0x80>>i);}
I2C_SCL=0;
}
return Byte;
}
/**
* @brief I2C发送应答
* @param AckBit 应答位,0为应答,1为非应答
* @retval 无
*/
void I2C_SendAck(unsigned char AckBit)
{
I2C_SDA=AckBit;
I2C_SCL=1;
I2C_SCL=0;
}
/**
* @brief I2C接收应答位
* @param 无
* @retval 接收到的应答位,0为应答,1为非应答
*/
unsigned char I2C_ReceiveAck(void)
{
unsigned char AckBit;
I2C_SDA=1;
I2C_SCL=1;
AckBit=I2C_SDA;
I2C_SCL=0;
return AckBit;
}
I2C.h
#ifndef __I2C_H__
#define __I2C_H__
void I2C_Start(void);
void I2C_Stop(void);
void I2C_SendByte(unsigned char Byte);
unsigned char I2C_ReceiveByte(void);
void I2C_SendAck(unsigned char AckBit);
unsigned char I2C_ReceiveAck(void);
#endif

 浙公网安备 33010602011771号
浙公网安备 33010602011771号