第一次作业:深度学习基础
第一次作业:深度学习基础
0x00 人工智能和机器学习概述
人工智能(Artificial Intelligence),使一部机器相认一样进行感知、认知、决策、执行的人工程序或系统。
人工智能历史
1956 达特茅斯会议标志AI诞生
1957 罗森布拉特发明感知机
1960 通用问题求解系统GPS系统
1968 DENDRAL专家系统问世
1969 M.Minsky和S.Papert指出感知机的局限性+本身技术条件的限制联结主义陷入谷底
1983 J.Jhop field解决NP难问题,使得连结主义重新受到人们关注
20世纪80年代 符号足以的代表方法是决策树和基于逻辑的学习
1986 D.E.Rumel-hart等人发明了BP算法
20世纪90年代 统计学习登场,并迅速占领了历史舞台,代表性技术是SVM
2006 Hlnton提出了深度学习的神经网络
人工智能的三个层面
计算智能:能存能算
感知智能:能听会说、能看会认
认知智能:能理解,会思考
逻辑演绎vs归纳总结
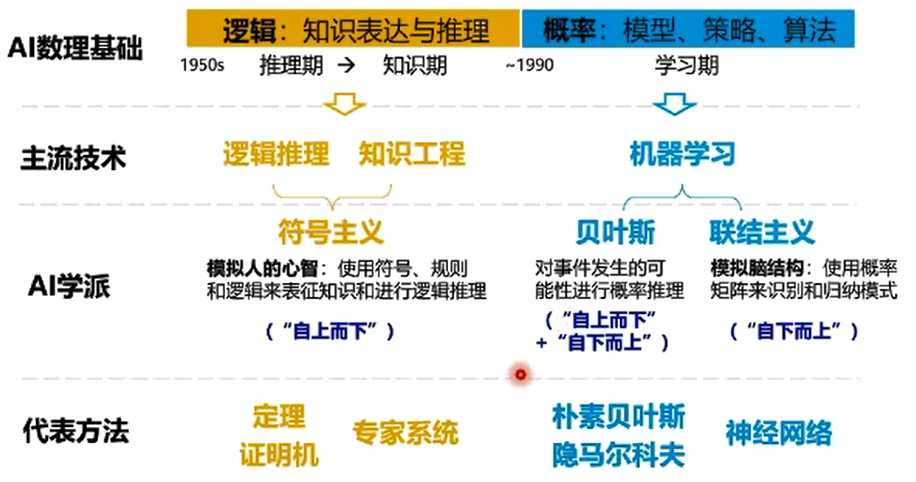
知识工程/专家系统 根据专家定义的知识和经验,进行推理和判断,从而模拟人类专家的决策过程来解决问题
- 基于手工设计规则建立专家系统
- 结果容易理解
- 系统构建费时费力
- 依赖专家主观静安,难以保证一致性和准确性
机器学习 机器自动训练
-
基于数据自动学习
-
减少人工繁杂工作,但结果可能不易解释
-
提高信息处理的效率,且准确率较高
-
来源于真实数据,减少人工规则主观性,可信度高
0x01机器学习
定义
最常用定义:计算机系统能够利用经验提高自身的性能
可操作定义:机器学习本质是一个基于经验数据的函数估计问题
统计学定义:提取重要模式、趋势,并理解数据,即从数据中学习
怎么学
模型:对要学习问题映射的假设(问题建模,确定假设空间)
策略:从假设空间中学习/选择最优模型的准则(确定目标函数)
算法:根据目标函数求解最优模型的具体计算方法(求解模型参数)
分类
数据标记:监督学习vs无监督学习
无监督学习从数据中学习模式,适用于描述数据
监督学习从数据中学习标记分界面(输入-输出的映射函数),适用于预测数据标记
半监督学习:部分数据标记已知,监督学习和无监督学习的混合
强化学习:数据标记未知,但知道与输出目标相关的反馈,决策类问题
数据分布:参数vs无参数模型
参数模型:对数据进行假设,待求解的数据模式/映射可以用一组有限且固定数目的参数进行刻画
例:线性回归、逻辑回归、感知机、k均值聚类
非参数模型:不对数据分布进行假设,数据的所有统计特征都来源于数据本身
例:k近邻模型、SVM、决策树、随机森林
tips:
-
非参≠无参,“参数”指数据分布的参数,而不是模型的参数。非参数模型的时空复杂度一般比参数模型大得多
-
参数模型的模型参数固定,非参数模型是自适应数据的,模型参数随样本的变化而变化
建模对象:判别vs生成模型
生成模型:对输入X和输出Y的联合分布P(X, Y)建模
例:朴素贝叶斯、隐马尔科夫、马尔科夫随机场
优点:
- 提供更多信息(建模边缘分布->采样生成样本)
- 样本量大时,更快收敛到真实分布
- 支持复杂训练情况(无监督训练、存在隐变量时)
缺点:
- 数据需求大
- 预测类问题准确率通常不如判别模型
判别模型:对已知输入X的条件下输出Y的条件分布P(Y|X)建模
例:SVM、逻辑回归、条件随机场、决策树
0x02深度学习概述
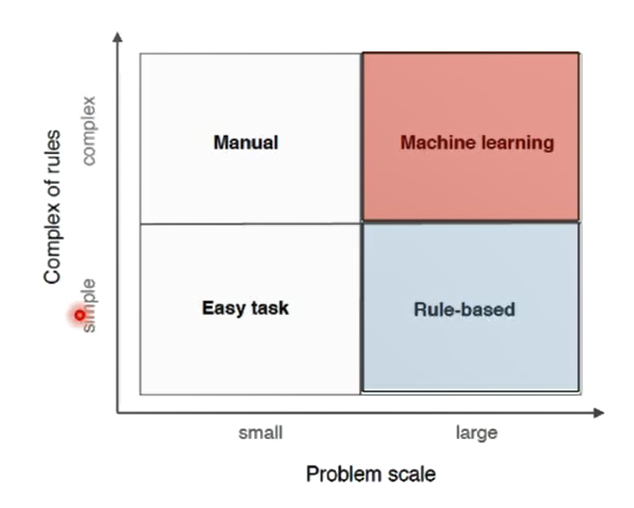
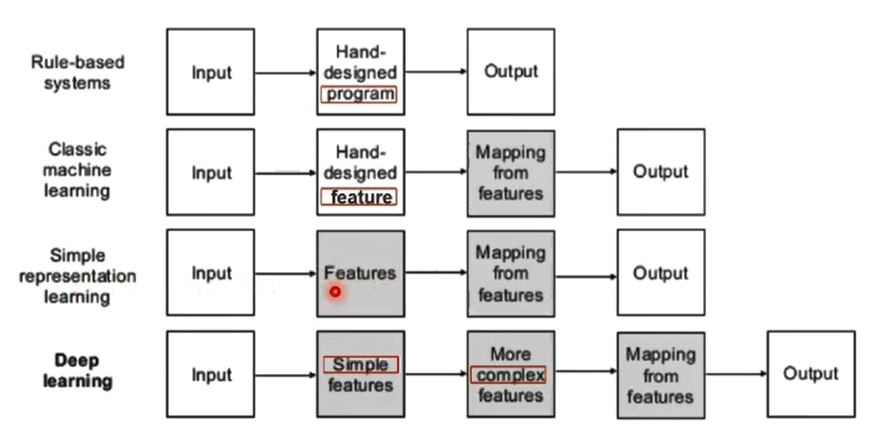
传统机器学习vs深度学习
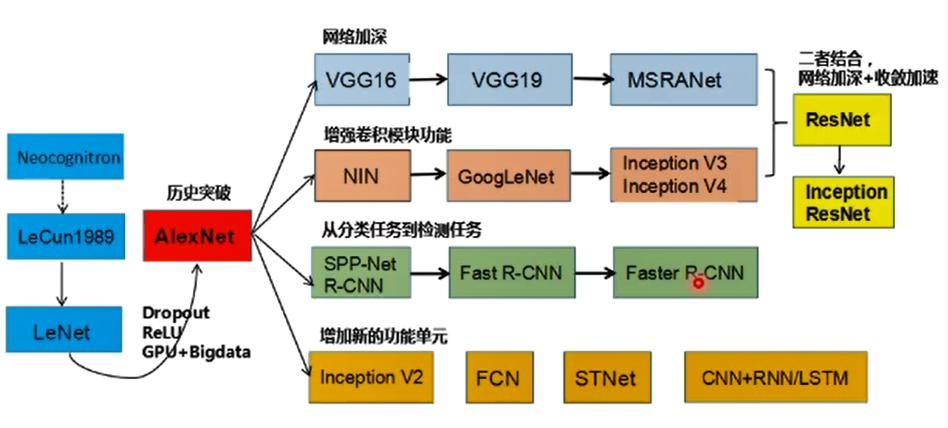
神经网络结构的发展
深度学习的“不能”
- 算法输出不稳定,容易被“攻击”
- 模型复杂度高,难以纠错和调试
- 模型层级复合程度高,参数不透明
- 端到端训练方式对数据依赖性强,模型增量性差
- 专注直观感知类问题,对开放性问题推理能力无能为力
- 人类只是无法有效引入进行监督,机器偏见难以避免
0x03神经网络基础
生物神经元
- 每个神经元都是一个多输入单输出的信息处理单元
- 神经元具有空间整合和时间整合特性
- 神经元输入分兴奋性输入和抑制性输入两种
- 神经元具有阈值特性
M-P神经元
- 多输入信号进行累加
- 权值\(w_i\)正负模拟兴奋/抑制,大小模拟强度
- 输入和超过阈值\(\theta\),神经元被激活(fire)
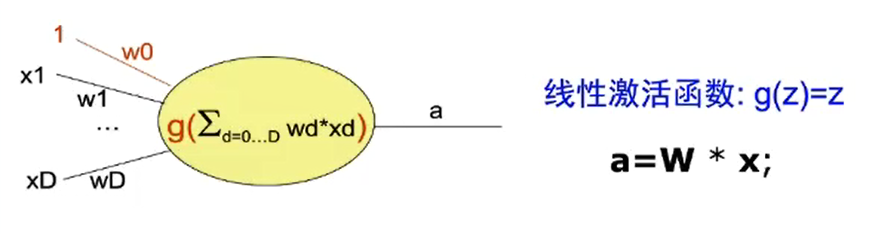
激活函数f
神经元继续传递信息、产生新连接的概率(超过阈值被激活,但不一定传递)
没有激活函数相当于矩阵相乘,多层和一层一样,只能拟合线性函数
例:
-
线性函数
\(f(x) = k * x + c\)
-
斜面函数
\(f(x) = \begin{cases} &T, & x \ge c \\ &k*x, &|x|\leq c \\ &-T, &x \lt -c \\ \end{cases}\)
-
阈值函数(e.g.阶跃函数)
\(f(x)=\begin{cases} &1, &x \ge c \\ &0, &x \lt c \\ \end{cases}\)
-
符号函数
\(y = F(x) = \begin{cases}&1, &x \gt 0 \\ &2, &x \le 0\end{cases}\)
-
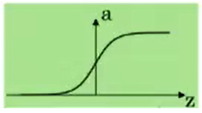
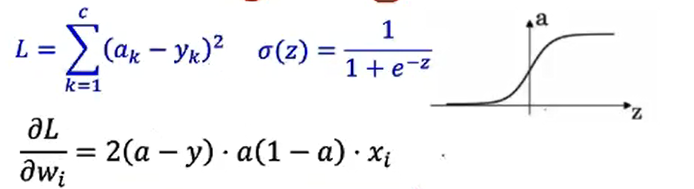
Sigmoid函数
\(\sigma(z) = \frac {1}{1+e^{-z}}\)
\(\sigma(z)^{'} = \sigma(z)(1-\sigma(z))\)
![image-20211002205627614]()
-
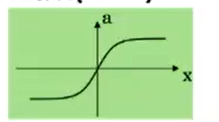
tanh函数
\(\displaystyle tanh(x)=2sigmoid(2x)-1=\frac {e^z-e^{-z}} {e^z+e^{-z}}\)
\(g(z)^{'}=1-g(z)^2\)
![image-20211002205636215]()
-
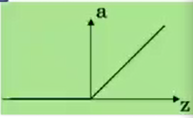
ReLU
\(relu(z) = max(0,z)\)
![image-20211002210627389]()
-
Leaky ReLU
\(leakyrelu(z)=max(0.01z, z)\)
单层感知器
M-P神经元的权重预先设置,无法学习
单层感知器是首个可以学习的人工神经网络
多层感知器
解决了单层感知机不能解决非线性可分问题的问题
万有逼近定理
如果一个隐层包含足够多的神经元,三层前馈神经网络(输入-隐层-输出)能以任意精度逼近任意预定的连续函数
双隐层感知机逼近非连续函数
当隐层足够宽时,双隐层感知器(输入-隐层1-隐层2-输出)可以逼近任意非连续函数:可以解决任何复杂的分类问题。
神将网络每一层的作用
- 神经网络学习如何利用矩阵的线性变换加激活函数的非线性变换,将原始输入空间投影到线性可分的空间去分类/回归。
- 增加节点数:增加维度,即增加线性转换能力。
- 增加层数:增加激活函数的次数,即增加非线性转换次数。
更宽or更深?
-
在神经元总数相当的情况下,增加网络深度可以比增加宽度带来更强的网络表示能力:产生更多的线性区域
-
深度和宽度对函数复杂度的贡献是不同的,深度的贡献是指数增长的,而宽度的贡献是线性的。
\(FC=\prod\limits ^d_{l=1}(\alpha · \theta)^{\beta_l}\)
其中\(\alpha\)表示参数每层对函数复杂度的贡献,\(\theta\)表示参数数量,\(\beta\)表示深度对函数复杂度的贡献,\(\alpha\)和\(\beta\)都是一个区间即相同的参数在不同数值下仍然有不同的复杂度。\(d\)表示最大深度,\(l\)表示第\(l\)层。
神经网络的参数学习:误差反向传播
-
多层神经网络可看成一个复合的非线性多元函数\(F(·):X\to Y\)
\(F(x)=f_n(...f_3(f_2(f_1(x)*\theta_1+b)*\theta_2+b)...)\)
给定训练数据\(\{x^i,y^i\}_{i=1:N}\),希望损失\(\sum_iloss(F(x^i),y^i)\)尽可能小
![image-20211002214151158]()
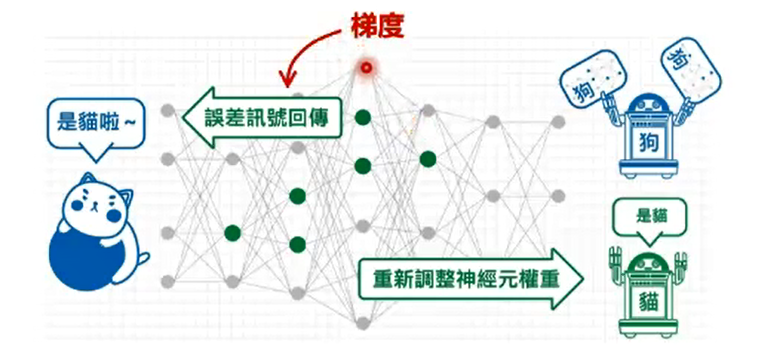
梯度和梯度下降
梯度:
- 多元函数\(f(x,y)\)在每个点可以有多个方向
- 每个方向都可以计算导数,称为方向导数
- 梯度是一个向量
- 方向是最大方向导数的方向
- 模为方向导数的最大值
无约束优化:梯度下降
参数沿负梯度方向更新可以使函数值下降
\(\theta_j=\theta_j-\alpha\frac{\partial}{\partial\theta_j}J(\theta)\)
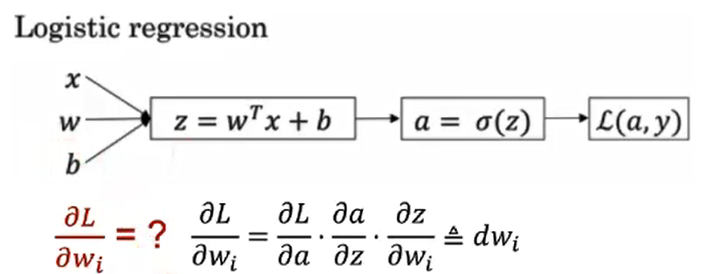
误差反向传播
复合函数的链式求导
梯度消失
- 增加深度会造成梯度消失(gradient vanishing),误差无法传播
- 多层网络容易陷入局部极值,难以训练
逐层预训练
受限玻尔兹曼机和自编码器
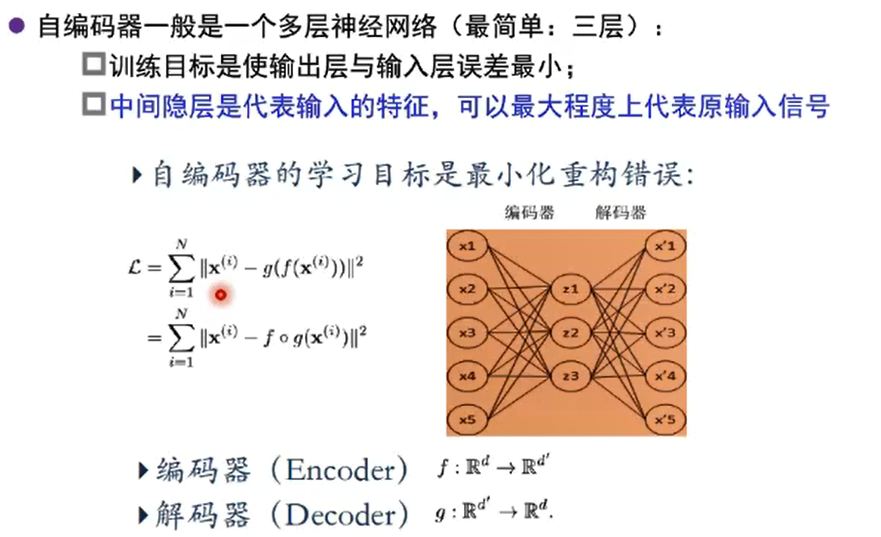
自编码器(autoencoder)
假设输入与输出相同(target=input),是一种尽可能复现输入信号的神经网络
将Input输入一个encoder编码器,就会得到一个code,加一个decoder解码器,输出信息。
通过调整encoder和decoder的参数,使得重构误差最小
没有额外监督信息:无标签数据,误差的来源是直接重构后信息与源输入相比得到
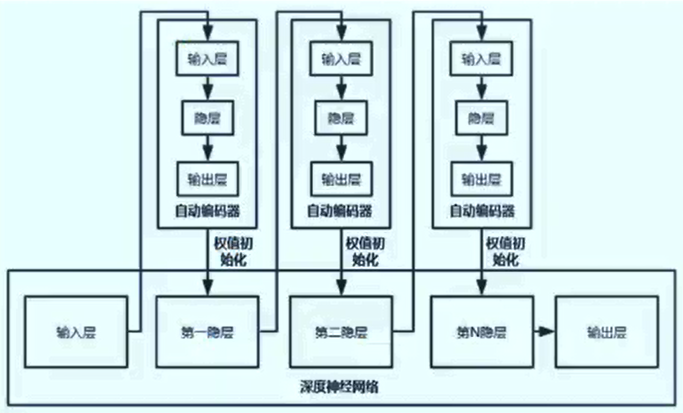
堆叠自编码器(stack autoencoder, SAE)
- 将多个自编码器得到的隐层串联
- 所有层预训练完成后,进行基于监督学习的全网络微调
- 数据输入\((x_1,x_1),(x_2,x_2),...,(x_N,x_N)\)
- 期望回归函数为\((x,x)\),实际学到的回归函数\((x, F(x))\)
- 其中\(F(x)=S(W^{2r}(x)^{2r})=(x)^{2r+1}\)(r层编码,r层解码)
- 一般编码层每层结点数递减,解码层每层的节点数递增(可用于降维)
- 自编码器是一种网络结构,可**配合其他结构搭建深度网络(如卷积、池化等)
- 根据经验风险最小化策略,应最小化的目标函数为\(|I-F|=\prod^N_{k=1}||x_k-F(x_k)||^2\)
- 可使用BP算法求解
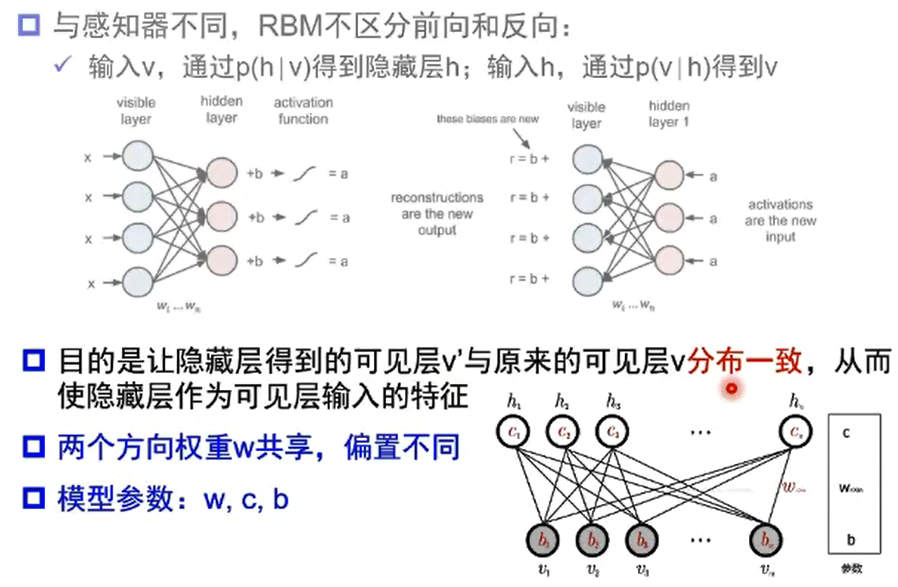
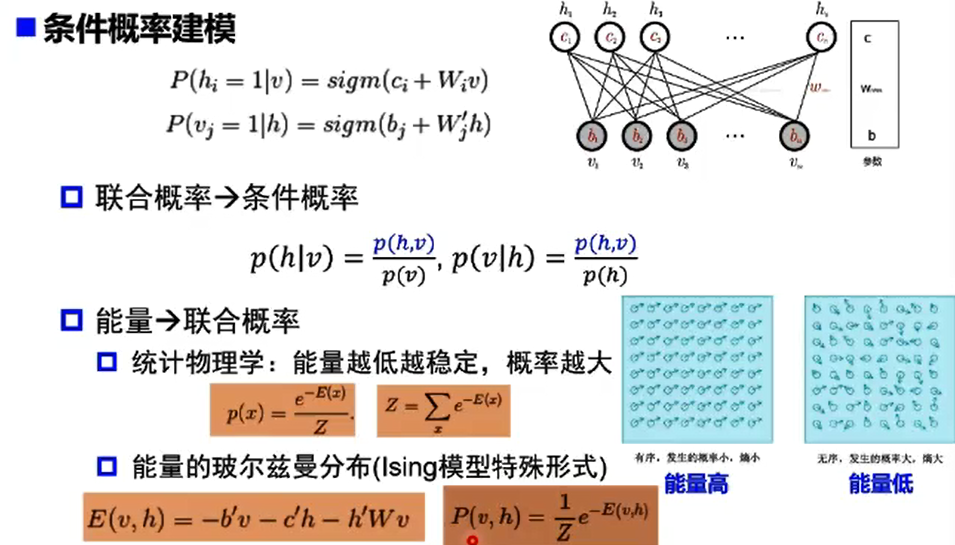
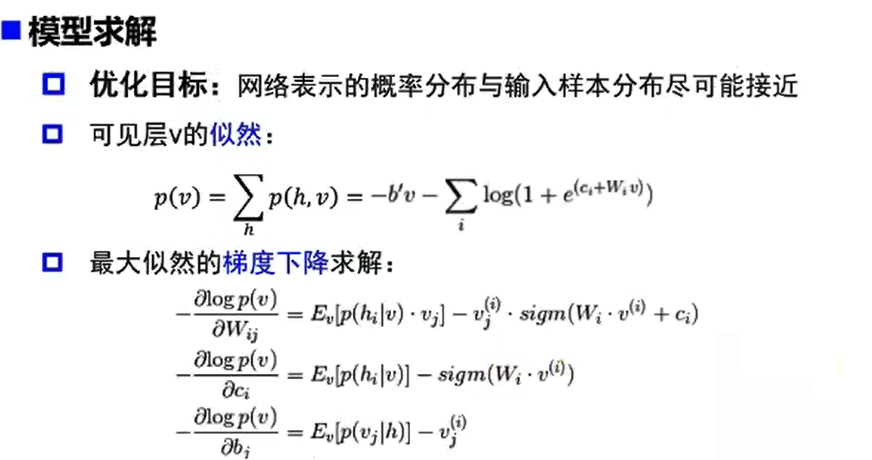
受限玻尔兹曼机(RBM)

自编码器vs受限玻尔兹曼机
- 结构上
- 自编码器编码和解码函数不同:W1, W2
- RBM共享权重矩阵,两个偏置向量
- 原理上
- 自编码器通过非线性变换学习特征,是确定的,特征值可以为任何实数;
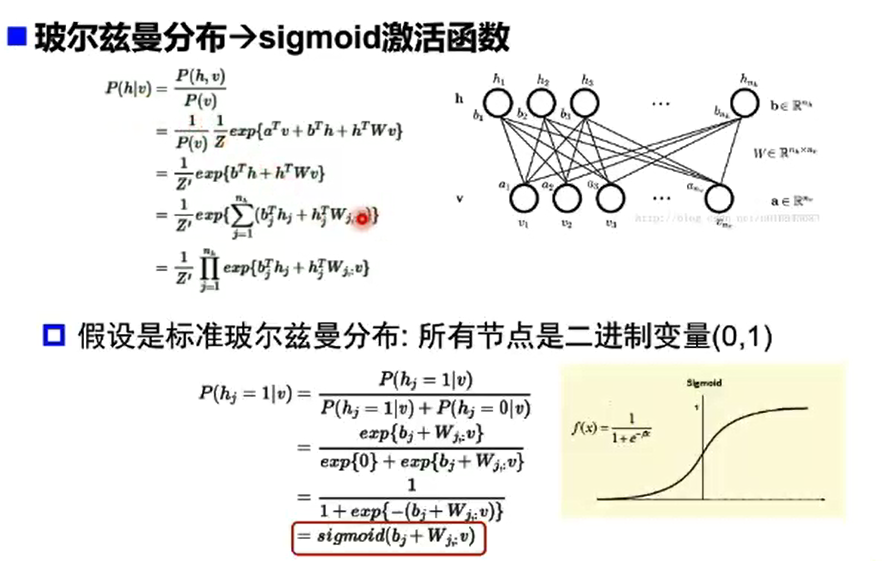
- RBM基于概率分布定义,高层表示为底层特征的条件概率,输出只有两种状态(未激活/激活),用二进制0/1表示
- 训练优化
- 自编码器通过最损失函数L最小化重构输入数据,直接用BP优化求解
- RBM基于最大似然,能量函数偏导无法直接计算,基于采样方法进行估计
- 生成/判别模型
- RBM对联合概率密度建模,是生成式模型
- 自编码器直接对条件概率建模,是判别式模型
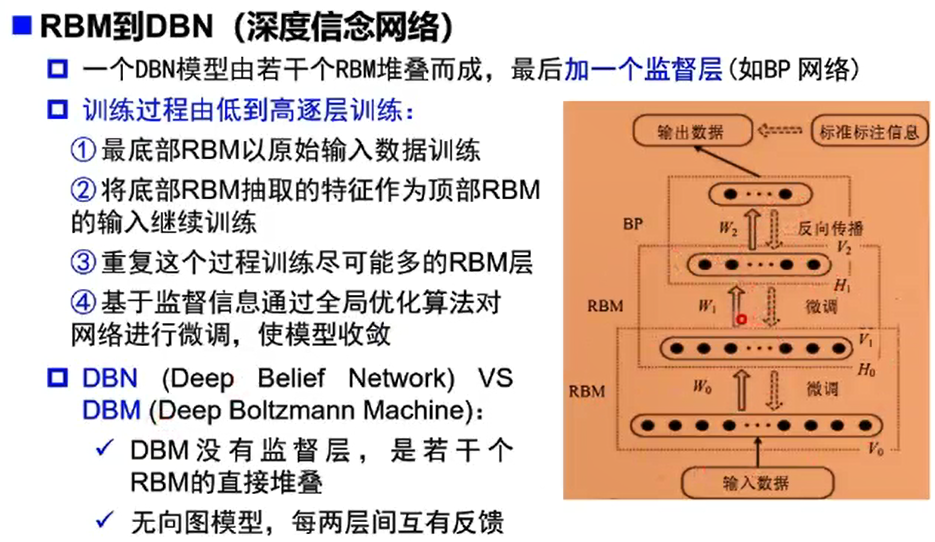
DNN vs DBN
- DNN是前馈神经网络,训练方法是BP
- 隐层激活函数使用ReLU\(\to\)改善梯度消失
- 输出层激活函数是softmax,目标函数是交叉熵+大量标注数据\(\to\)避免差的局部极小值
- 正则化+dropout\(\to\)改善过拟合
- 没有使用逐层预训练
解决梯度消失
- Layer-wise Pre-train:2006年Hinton等提出的训练深度网络的方法,用无监督数据作分层预训练,再用有监督数据fine-tune
- ReLU:新的激活函数解析性质更好,克服了sigmoid函数和tanh函数的梯度消失问题
- 辅助损失函数:e.g. GoogLeNet中的两个辅助损失函数,对浅层神经元直接传递梯度
- Batch Normalization:逐层的尺度归一
- LSTM:通过选择记忆和遗忘机制克服RNN的梯度消失问题,从而可以建模长时序列
0x04总结
人工智能是一个广阔的概念,机器学习是其中的一个方面,而深度学习是机器学习的一个方面。
神经网络仿照生物的神经元,由M-P神经元出现开始,到单层感知器(首个可以学习的人工网络),再到多层感知器和激活函数(解决了非线性可分问题),BP方法调整参数可以使loss函数向极小值靠近,再到ReLU函数改善梯度下降,直到今天的AlexNet、Inception家族、ResNet及一些变种。中间由于理论或硬件技术等难题经历过几次低谷,随着技术的发展和理论的更新,有过几次爆发。
当今的人工智能还在感知智能的方面发展(视觉、自然语言处理等),仍存在着很多不足和难以解决的问题。
问题
- 对于一些原理只知道了内容,但并不知道是怎么来的。比如:万有逼近定理。
- 激活函数相当于对原数据空间进行了一次空间变换?为什么这样的空间变换能够保证得到的结果一定线性可分?感觉比较模糊,不大理解。
- 受限玻尔兹曼机和自编码器基本上都没听懂。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号