【振动控制】振动下机械臂鲁棒快控制-EXP-振动控制-机械臂
振动下机械臂鲁棒快控制-EXP-振动控制-机械臂
实验目的
摘要:
针对基座振动和负载变化的机械臂实验,设计鲁棒有限时间控制器。在两连杆机械臂实验装置上测试,能快速定位目标位置,抗干扰能力强,为控制实现和实验搭建提供参考。
关键词:机械臂; 振动激励; 镇定控制; 负载变化; 隐式Lyapunov函数;Simulink;Maxon EC45;Panasonic HG⁃C1400;Broadcom HEDL-5540
注:本文仅从实验系统与工程实现角度进行记录。
实验系统整体结构
下图为根据实验内容整理的系统结构框图。
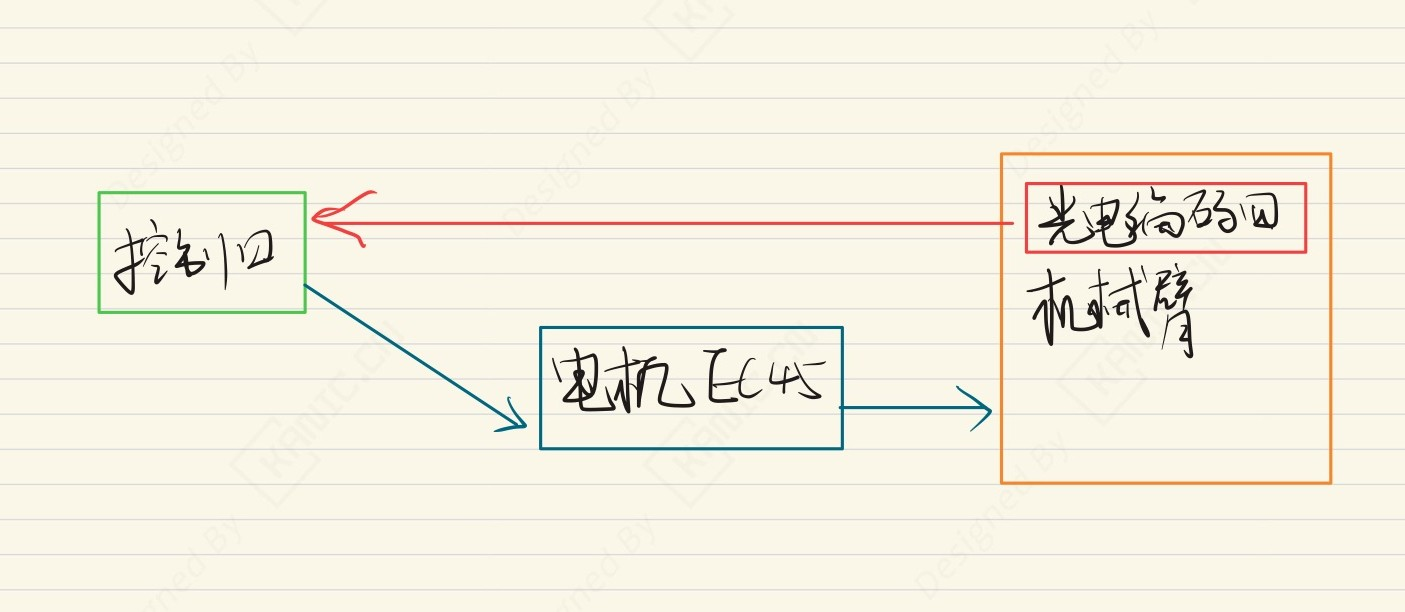
关键信号与实验流程说明(精炼版)
振动控制闭环:
- PC → 直流电机(曲柄滑块) → 振动基座 → 激光位移传感器 → PC
(PC下发振动指令 → 电机驱动曲柄滑块 → 基座产生振动 → 位移传感器测量 → PC采集)
说明:仅记录信号在系统中的流向与作用,不涉及控制算法或具体参数。
试验现场
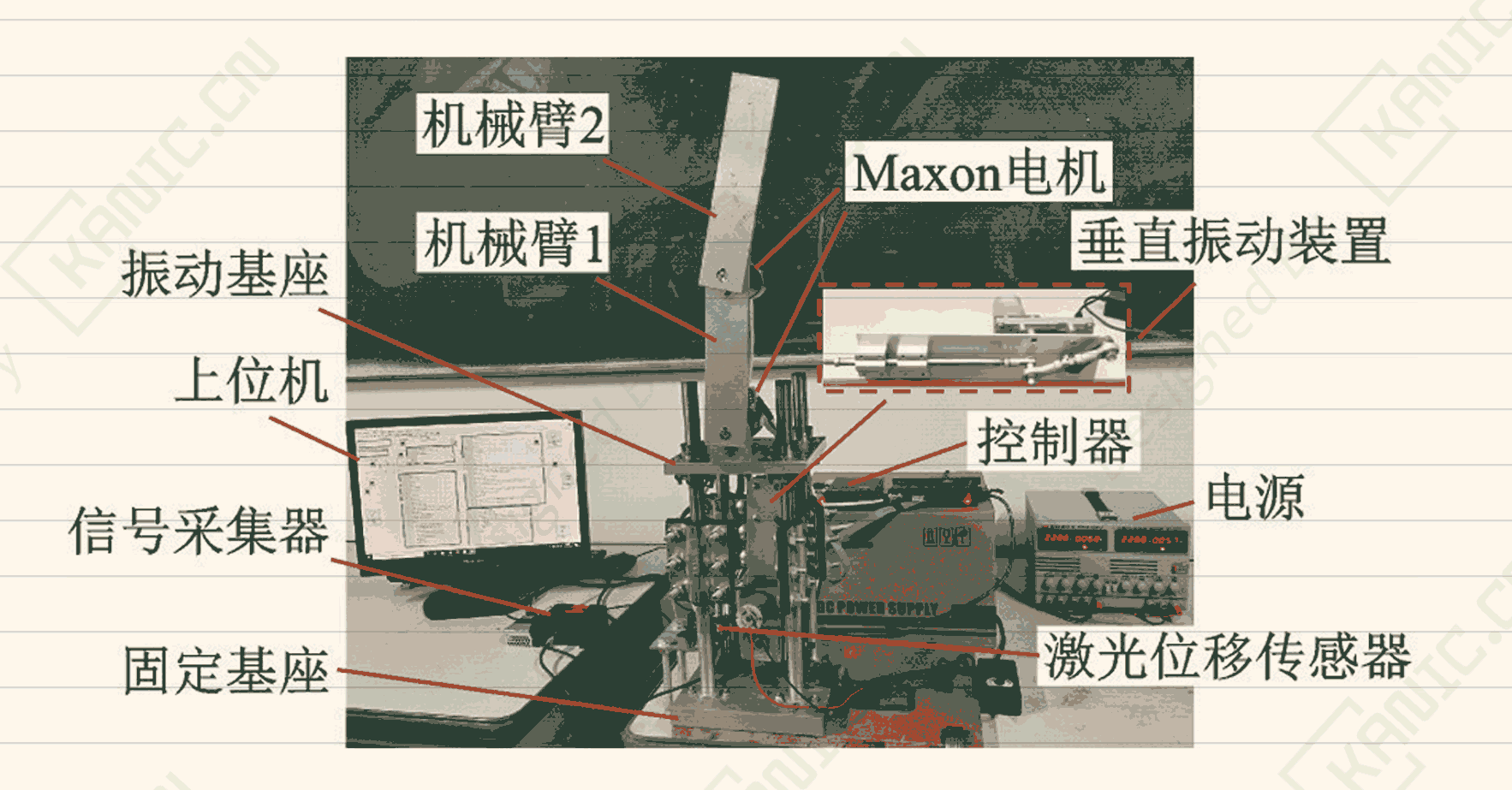
涉及的部分硬件
- 直流无刷电机 Maxon EC45
- 激光位移传感器 Panasonic HG⁃C1400
- 型光电编码器 **Broadcom HEDL-5540 **
结构框图来源于实际实验平台验证后的通用实现形式,细节根据具体硬件版本略有差异。
交流说明
本文首发于【GitHub/Gitee】,作者:KANIC,研究方向为 自动化实验平台、控制算法验证及半实物仿真系统。
相关实验或程序已整理至 GitHub,可在 GitHub 平台搜索 KANIC-lab/KANIC 查看。
如需进一步讨论,可私信联系,并注明文章编号。文章编号位于标题末尾,以字母开头如“EXP-XXXX-XXX”


 浙公网安备 33010602011771号
浙公网安备 33010602011771号