三相无刷交流电机Simulink闭环控制-PART-三相无刷电机-VA解析
三相无刷交流电机Simulink闭环控制-PART-三相无刷电机-VA解析
关键词:AMC B40A40AC simulink 三相无刷交流电机
一、问题分析
在高校或工程自动化实验中,经常会遇到三相无刷交流电机或类似电机的控制问题。
典型难点包括:
- 电机需要通过驱动器控制,初学者往往不清楚信号如何连接和对应
- Simulink控制器发送的电压信号与驱动器电流的对应关系不明确
- 控制信号过大可能导致驱动器或电机损坏
- 电流监测和反馈环节未正确接入,难以实现准确的速度或位置控制
案例背景:
- 电机类型:三相无刷交流电机
- 驱动器规格:峰值电流 30A,控制电压最大 7.25V
- 控制方式:Simulink发送电压信号控制驱动器
- 环境特点:实验台上,存在复杂负载或干扰
二、处理思路与解决方案
-
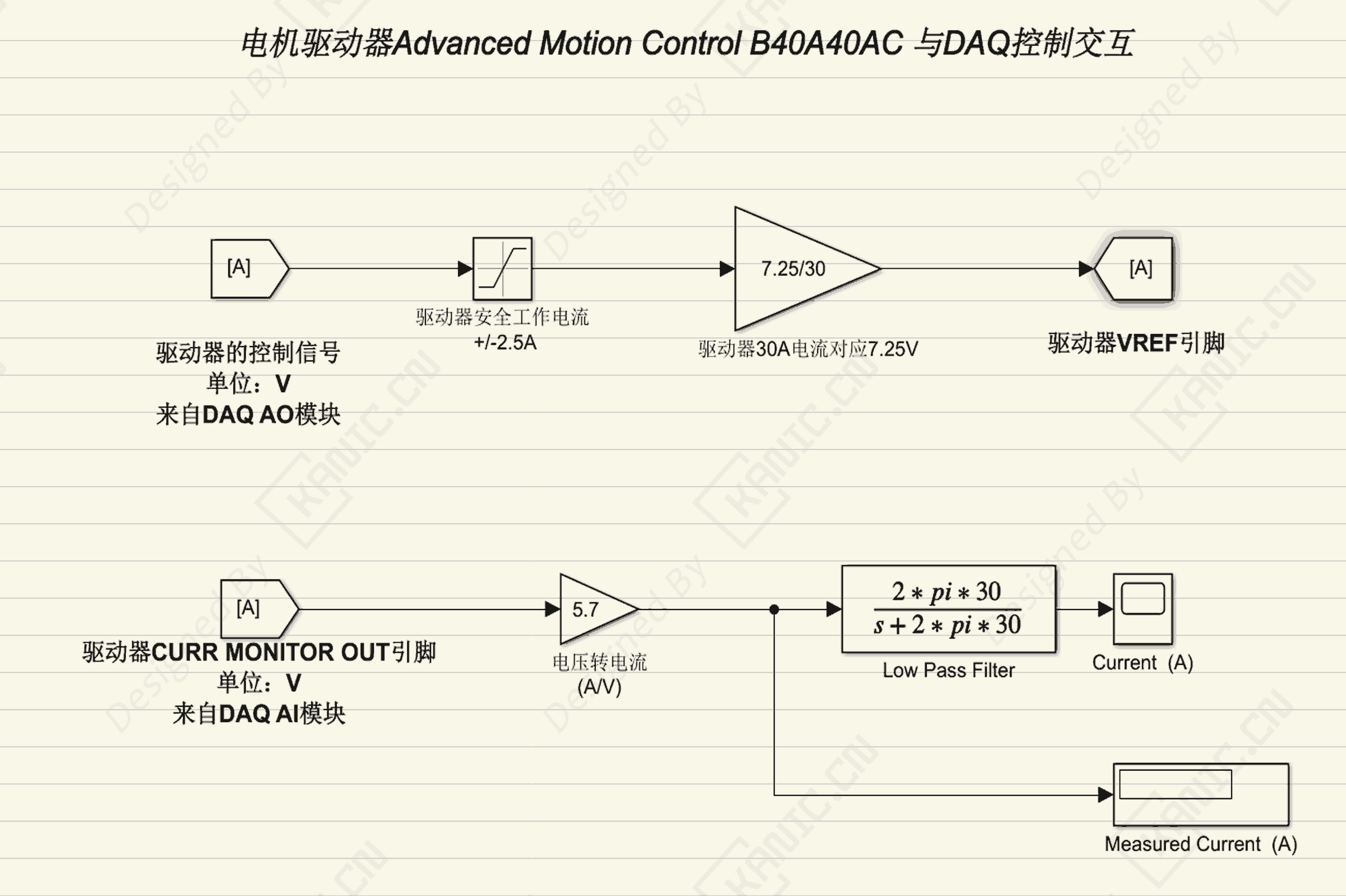
建立电压-电流对应关系
- 驱动器最大峰值 30A 对应控制电压 7.25V
- 根据实际输出电压计算电流:每 1V ≈ 5.7A
-
控制信号限幅
- Simulink中添加限幅器(Saturation)
- 防止发送超出驱动器最大电压的指令,避免损坏电机或驱动器
-
电流监测接入
- 驱动器提供电流监测端口,输出电压信号
- 将信号接入Simulink,实现位置或速度控制的反馈环
-
滤波器处理(可选)
- 在复杂环境下增加低通滤波器
- 降低控制信号噪声,提高控制稳定性
-
Simulink程序设计思路
控制器 → 限幅器 → 驱动器输入
电流输出 → 电流转换 → 控制器反馈
三、经验小结
- 核心:电压-电流对应 + 限幅 + 闭环反馈
- 注意:参数明确、信号安全、环境干扰时加滤波
提示:遇到控制不稳或接线复杂问题,可提供Simulink调试及电流反馈方案,快速安全实现电机控制。
四、🔑 说明
-
本文首发于【GitHub/Gitee】,作者:KANIC,研究方向为 自动化实验平台、控制算法验证及半实物仿真系统。
相关实验或程序已整理至 GitHub,可在 GitHub 平台搜索 KANIC-lab/KANIC 查看。
如需进一步讨论,可私信联系,并注明文章编号。文章编号位于标题末尾,以字母开头如“EXP-XXXX-XXX”


 浙公网安备 33010602011771号
浙公网安备 33010602011771号