程序监控与异常防护-PART-Simulink-看门狗
程序监控与异常防护-PART-Simulink-看门狗
关键词
看门狗、程序监控、异常处理、Simulink、自动化控制
一、问题分析:为什么需要看门狗
在自动化实验控制平台中,我们经常会遇到以下问题:
- 程序异常卡死,设备失去响应
- 外部干扰导致循环逻辑中断,控制器失效
- 长时间运行后,系统出现未捕获的死锁或内存泄露
示例:
你在半实物仿真实验室中使用控制器控制移动小车,如果程序在中途卡死,小车可能持续运行或停在半路,造成实验翻车。
工程原因:
系统程序通常是顺序或循环逻辑,如果没有实时检测机制,一旦进入死循环或异常状态,程序可能一直占用资源,无法处理新的指令。
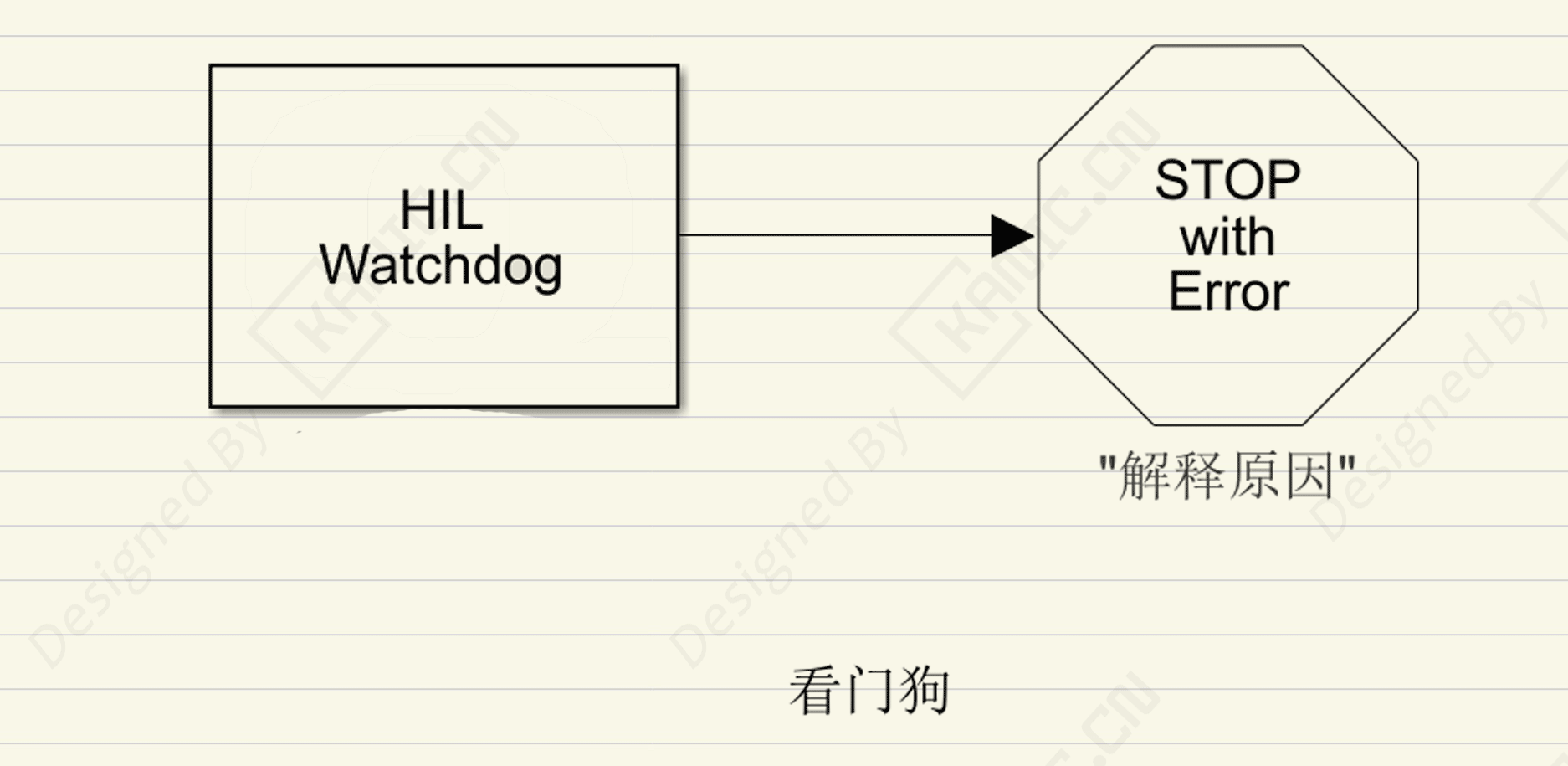
解决思路:
看门狗(Watchdog)是一种硬件或软件计时器,用于监控程序是否正常执行。如果程序长时间没有“喂狗”(即复位计时器),看门狗会触发异常处理或重启系统,保证设备安全运行。
二、处理思路
软件看门狗模块
- 通过定时器在程序中定期检查各模块状态
- 出现异常可以调用错误处理函数或重启应用层程序
优势:
- 灵活,可监控多任务
注意:
- 必须确保软件本身不会被整体卡死,否则失效
实际工程案例
- 实验室移动小车控制程序中,增加了 500ms 的硬件看门狗
- 每完成一次速度控制循环,即“喂狗”
- 如果主循环卡死超过 500ms,看门狗触发复位,小车自动停止,避免碰撞
经验边界:
- 看门狗保护是最后一道防线,不能替代代码的异常处理
- 过度依赖看门狗可能掩盖软件逻辑缺陷
三、经验提示与小结
经验提示
- 看门狗是安全机制,不是性能优化工具
- 喂狗必须在正常任务完成后,不要在异常或死循环中盲目喂狗
- 在多任务系统中,可结合软件和硬件看门狗,提高可靠性
🔑 说明
-
本文首发于【GitHub/Gitee】,作者:KANIC,研究方向为 自动化实验平台、控制算法验证及半实物仿真系统。
相关实验或程序已整理至 GitHub,可在 GitHub 平台搜索 KANIC-lab/KANIC 查看。
如需进一步讨论,可私信联系,并注明文章编号。文章编号位于标题末尾,以字母开头如“EXP-XXXX-XXX”


 浙公网安备 33010602011771号
浙公网安备 33010602011771号