【振动控制】鲁棒与自适应的垂尾抖振控制-EXP-振动控制-垂尾
鲁棒与自适应的垂尾抖振控制-EXP-振动控制-垂尾
实验目的
摘要:
对垂尾低阶模态抖振,提出 RFxLMS 多模态控制器,对次级通道实施反馈阻尼补偿,并用宏纤维复合材料压电作动器开展地面与风洞试验。
关键词:
- 垂尾抖振
- 主动控制
- FxLMS算法
- 压电作动器
- 鲁棒控制
注:本文仅从实验系统与工程实现角度进行记录。
实验系统整体结构
下图为根据实验内容整理的系统结构框图。
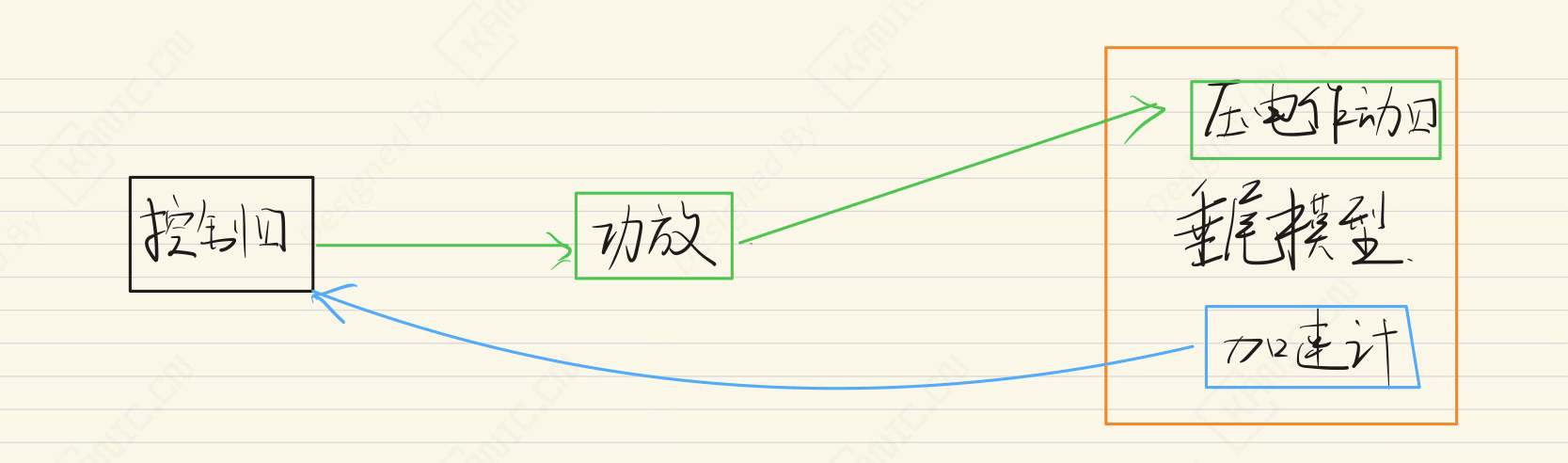
关键信号与实验流程说明(精炼版)
- 控制器发送位置指令给电机。
- 电机接收指令并旋转,驱动液压泵。
- 液压泵将电机的旋转转化为液压流量和压力。
- 液压缸(执行器)接收液压流量产生位移,推动负载。
- 执行器上的编码器测量活塞位移,反馈给控制器。
- 执行器上的压力传感器测量液压缸内压力,反馈力信息。
- Tank(油箱)储存液压油,缓冲系统压力波动。
- 油箱压力传感器监测油液压力,确保系统健康与稳定。
说明:仅记录信号在系统中的流向与作用,不涉及控制算法或具体参数。
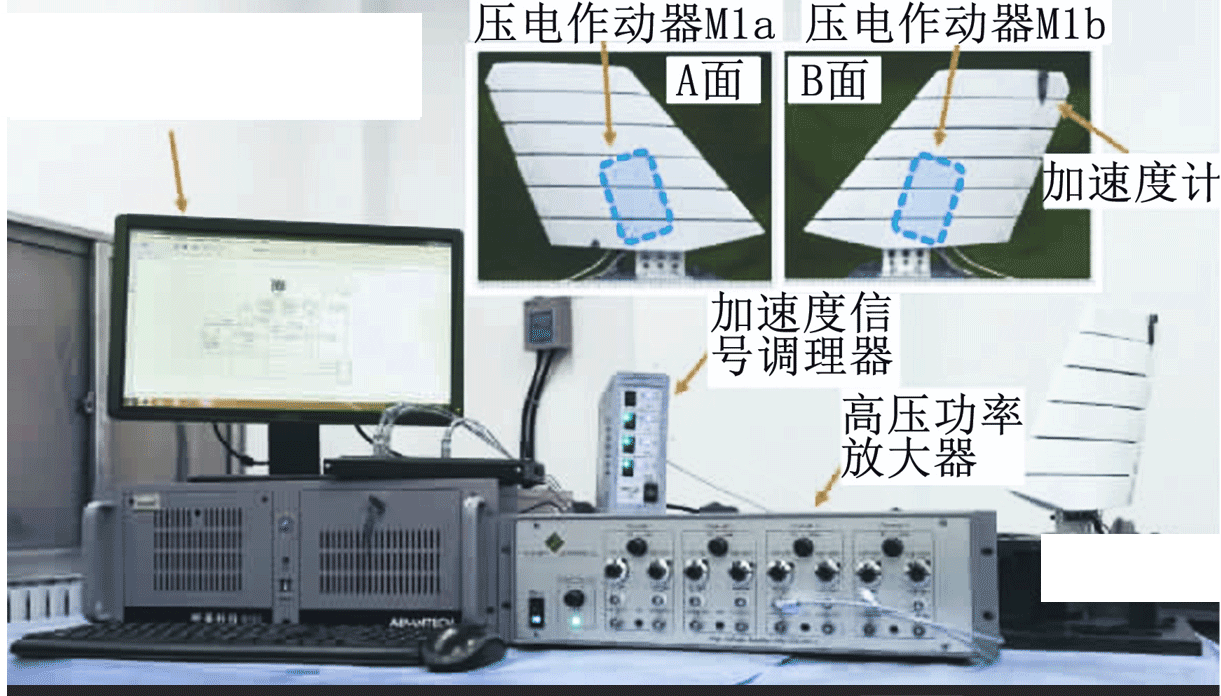
实验数据与现场
说明
结构框图来源于实际实验平台验证后的通用实现形式,细节根据具体硬件版本略有差异。
涉及的部分硬件
- 压电作动器 Smart Material P1 型
- 加速度传感器 PCB 33B30
- 功放 Smart Material HVA 1500/50-4
以上配置仅用于说明实验背景,不同应用场景下可采用等效方案。
交流说明
本文仅记录一种可复现的实现方式,不同应用场景下会有不同取舍。如果你对其中某个环节(传感器 / 控制算法 / 实验结构)感兴趣, 欢迎交流不同的实现思路。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号