⚡ 实时控制也能多线程?高效并行机制解析-SFTW-Multithreading
⚡ 实时控制也能多线程?高效并行机制解析-SFTW-Multithreading
多线程执行可显著提升复杂控制系统效率。不同采样率的算法可以在独立线程中并行运行,例如 1 kHz 高速控制 ⚡ 与 100 Hz 轨迹规划 🛠️ 同时进行,各线程互不干扰。在 双核 CPU 系统 💻 中,线程可同时运行在各自核心上,充分利用计算资源;单任务模式下则无法发挥多核优势。
💡 举例:想象一个自动化机械臂,快速控制电机位置(1 kHz)同时执行慢速路径规划(100 Hz),多线程能保证高速控制随时响应,慢速规划也不会被延迟。
多核平台可灵活分配核心,例如在四核系统中仅使用 CPU 0 和 CPU 2 🖥️,从而实现:
- 🌟 更低 CPU 占用率 → 系统负载更轻,可支持更多任务
- ⚡ 更快响应速度 → 控制算法执行更及时
- 🔋 减少功耗 → 高效利用核心降低能耗
- ✅ 保证高采样率任务稳定执行 → 实时控制可靠
- 🎯 仿真精度更高 → 精确反映系统动态
通过这种机制,可实现 多线程、多速率模型的高效并行执行,在复杂实时控制和仿真场景中保持高性能与可靠性。
🏎️ 单 CPU 下的多线程多任务模式
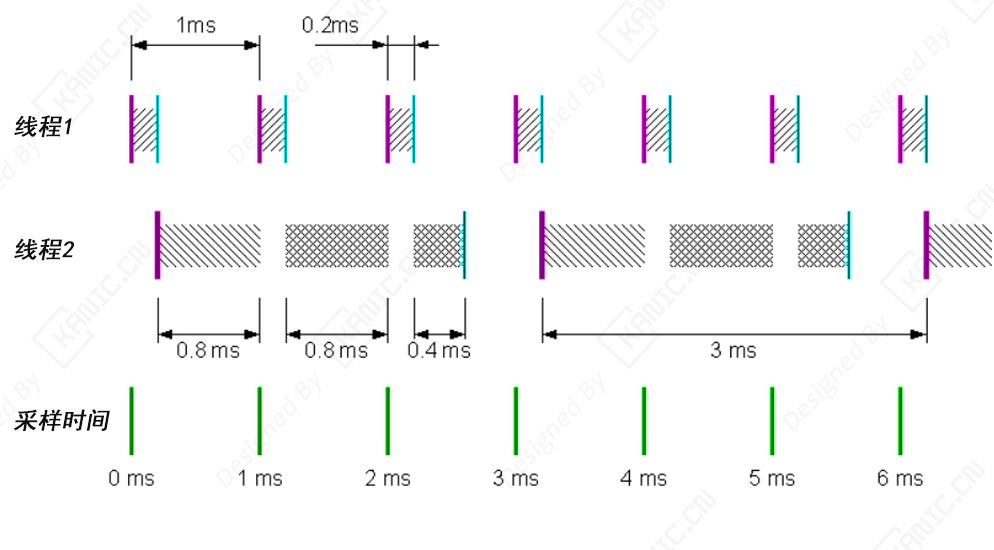
在单 CPU 系统中,通过多线程可以为不同任务创建独立线程。例如,一个 1 ms 高速任务(T1) ⚡ 和一个 3 ms 低速任务(T2) 🛠️ 可以分别运行在各自线程中。T1 优先级高,会在需要时打断 T2 执行,确保高速任务 不丢采样 ✅ 并保持最小延迟。同时,T2 被打断后可以继续执行,保证 低速任务也不丢采样,延迟固定且可控,抖动最小。
💡 举例:在无人机控制中,高速飞行控制(T1)可以打断低速导航计算(T2),确保飞行姿态始终精准,同时导航路径计算仍然完整执行。
⚡ 单 CPU 下的多线程多任务模式
一个线程的运行时间为 1 毫秒,另一个线程的运行时间为 3 毫秒。任务 T1 分配给一个线程,任务 T2 在另一个线程中运行。第一个线程 (T1) 的优先级高于第二个线程 (T2)。此场景的时序图如下所示:
🖥️ 多 CPU 下的单任务模式
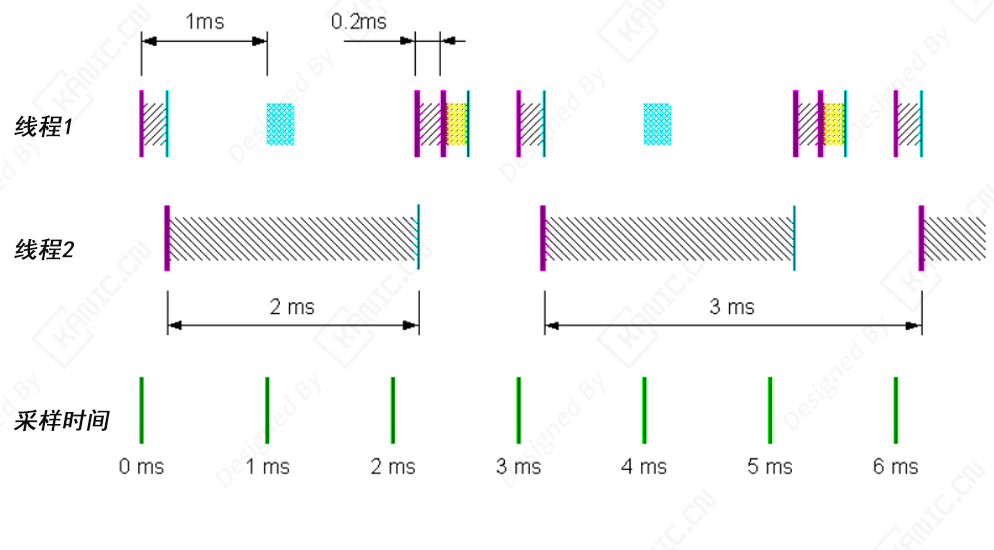
如果只使用单线程执行,即使多 CPU 系统也只能创建一个线程,所有任务在同一个线程中顺序执行。高优先级任务(T1)⚡ 无法打断低优先级任务(T2)🛠️,可能导致 采样丢失 ❌ 或任务延迟累积。为避免丢采样,必须限制各任务总计算时间小于高速任务采样时间,这对复杂模型是一大限制。
💡 举例:如果无人机单线程执行,高速飞控(T1)可能错过采样点,导致飞行姿态控制延迟或震荡,降低系统可靠性。
⚡ 多CPU下的单任务模式
在这种模式下,即使存在多个采样率,也只会创建一个线程来执行模型中的所有模块。因此,任务 T1 和 T2 必须在同一个线程中运行。Simulink 在常规仿真中使用的任务优先级方案也是如此。模块仍然根据其采样时间被分组为不同的“任务”,但这些任务都在同一个线程中执行。采样时间为 1 毫秒的任务 (T1) 被赋予更高的优先级,而采样时间为 3 毫秒的任务 (T2) 则被赋予较低的优先级。此场景的时序图如下所示:
相比之下,多线程模式无需受此限制,高速任务和低速任务可独立调度,响应及时且无采样丢失 ✅,显著提升实时控制系统的可靠性和灵活性。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号