【编码器信号】滤波前后差别你必须知道-PART-编码器-噪声
【编码器信号】滤波前后差别你必须知道-PART-编码器-噪声
编码器简介
编码器可以测量角位置和速度。类型很多,但最常用的是旋转增量光电编码器(如图 1.1 所示),本文使用型号为 US Digital E3 的编码器。
与电位器不同,编码器测量的是相对位置,其角度依赖于前一位置和上一次上电时的位置。编码器内部包含一个编码盘和多个径向光栅。该盘与直流电机轴相连,当轴旋转时,一束 LED 光束穿过光栅,并由光电传感器接收,从而生成 A 信号 和 B 信号(如图 1.2 所示)。
编码盘每旋转一圈,会触发一个索引脉冲信号,该信号可用于标定或系统回零。电机轴旋转时产生的 A、B 信号,通过解码算法生成计数值。
编码器的分辨率由编码盘线数和解码方式决定。例如,一只 512 线编码器在轴旋转一周时生成 512 个计数值。然而,在四倍频解码器模式下(如图 1.2 所示),每转计数值可达到 2048。其原理在于 A 相与 B 相的相位偏移:在每个脉冲周期内,可产生多种开/关状态,使编码器能够检测旋转方向,因为顺时针与逆时针旋转时开/关状态出现的顺序不同。
图 1.1 旋转增量光电编码器示意

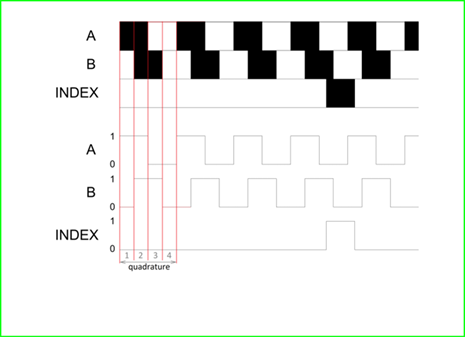
图 1.2 A/B 相信号与索引脉冲示意
编码器连接到 Simulink 后的首要任务
在使用 Simulink 读取编码器信号之前,首先需要测量每转的总计数值。操作步骤如下:
- 停止 Simulink 中的 编码器读取控制器
- 将圆盘旋转到被控对象标识的 0° 位置
- 重新启动 编码器读取控制器,旋转被控对象一整圈
编码器计数值应接近 2048,与 US Digital E3 编码器手册一致。
- 编码器分辨率:512 线/转
- 四倍频模式计数值:4 × 512 = 2048
从编码器计数值计算旋转角度
每转对应计数值为 2048。将计数转换为角度的增益为:
增益 = 360° / 2048 counts ≈ 0.1748° / count
验证步骤:
- 将圆盘转动到 0° 位置
- 启动 Simulink 编码器读取控制器
- 将圆盘旋转一整圈,确认输出值为 360°
从编码器计数值计算旋转弧度
若需测量旋转弧度,可将增益设置为:
增益 = 2π / 2048 (单位:rad)
注意:此处使用弧度而非角度。
被控对象旋转速度测量(编码器速度测量)
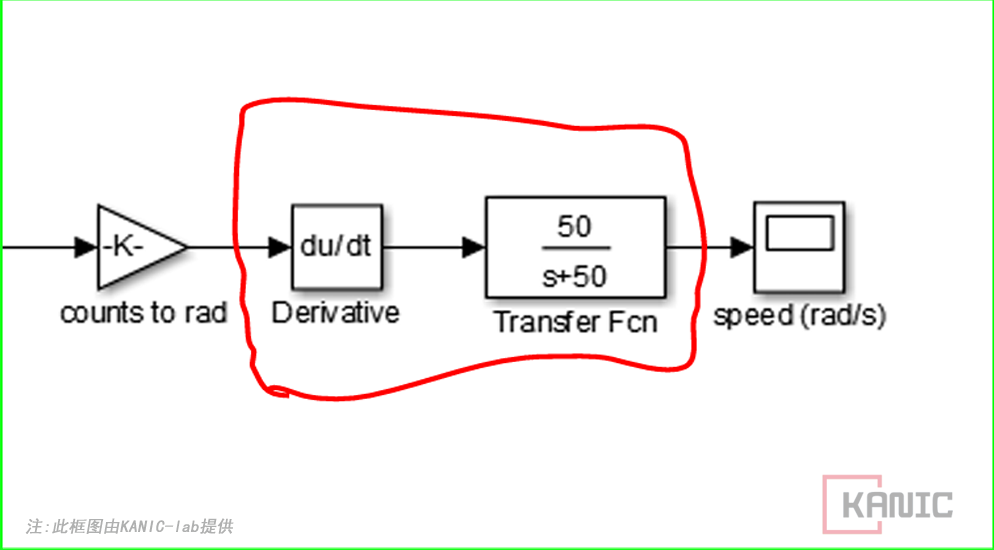
要测量旋转速度,可将 Derivative 模块 连接到编码器标定增益输出,实现速度计算(单位:rad/s)。
示例操作:
-
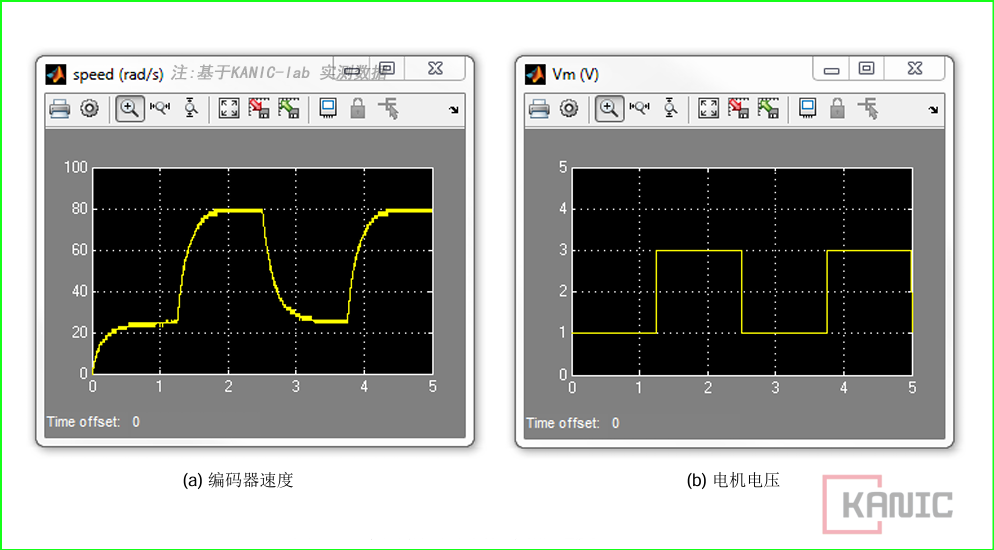
给被控对象电机施加一个 1V~3V 的阶跃电压,频率 0.4 Hz
-
通过编码器观察速度响应,如下图所示:
编码器应用经验:旋转测量与直线位移
除了本文主要介绍的旋转增量光电编码器,实际实验和工程中还会遇到其他类型的编码器。下面分享一些应用经验,供用户参考:
- 旋转编码器(Rotary Encoder)
- Omron E6B2
- 该型号经过实际测试,在旋转角度和速度测量中表现稳定可靠,适用于实验和小型控制系统。
- 应用场景:精确测量电机旋转角度、速度反馈。
- 直线编码器(Linear Encoder)
- SIKO MSK200 + MB200(磁性传感器 / 磁条型)
- 在直线位移测量中被用户多次采用,并提供过技术支持,效果良好。
- 应用场景:自动化实验平台、直线运动测量、实验数据采集。
编码器速度信号噪声及滤波
编码器的本质输出是脉冲信号。在实验中,这些脉冲首先被换算为角位移(弧度),再对弧度信号进行微分,得到角速度(rad/s),也就是我们在控制系统中真正需要的“速度量”。
噪声产生原因
微分运算会显著放大噪声。
以一只 2048 线的增量式编码器为例,每转一圈输出 2048 个离散阶跃信号,每个阶跃对应的角度为:
也就是说,编码器输出的并不是连续的角度变化,而是阶跃型离散信号。对这种信号进行微分时,本质上是在对大量不连续点做运算,结果必然表现为高频噪声严重的速度波形。
此外,即便很多编码器在硬件层面做了滤波,在真实实验环境中,电机、电源纹波、开关噪声以及布线干扰仍会叠加到脉冲信号上,并在速度计算阶段被进一步放大。
软件滤波处理
在角速度计算之后,必须引入滤波环节。
在 Simulink 中,我们通常根据编码器分辨率、采样周期以及控制系统带宽,设计合适的滤波器,例如:
- 一阶低通滤波器
- 二阶低通滤波器
- 带有物理意义的传递函数
经过合理的软件滤波后,原本“能看到但不敢用”的速度信号,可以直接变成稳定、干净、可用于闭环控制的角速度信号。
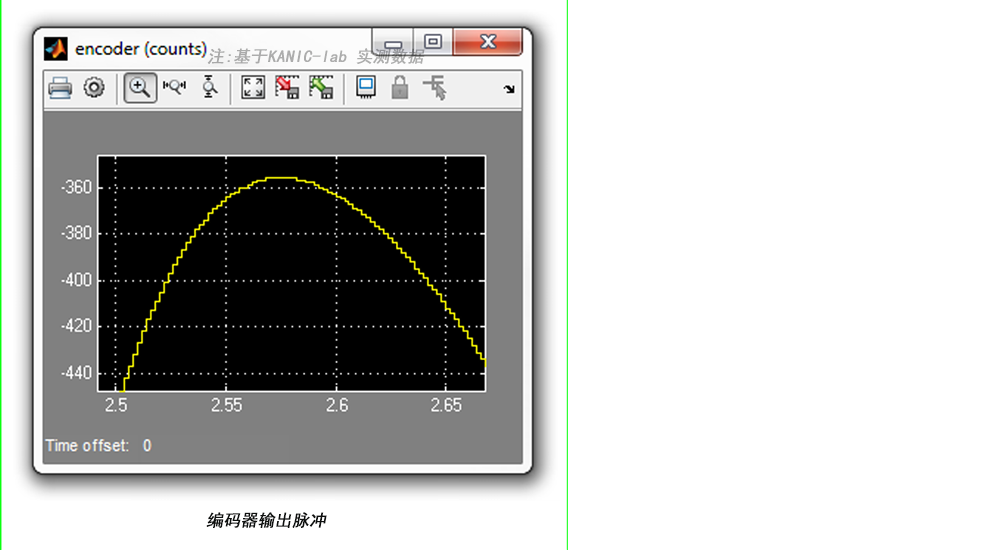
程序示例图
实际测试
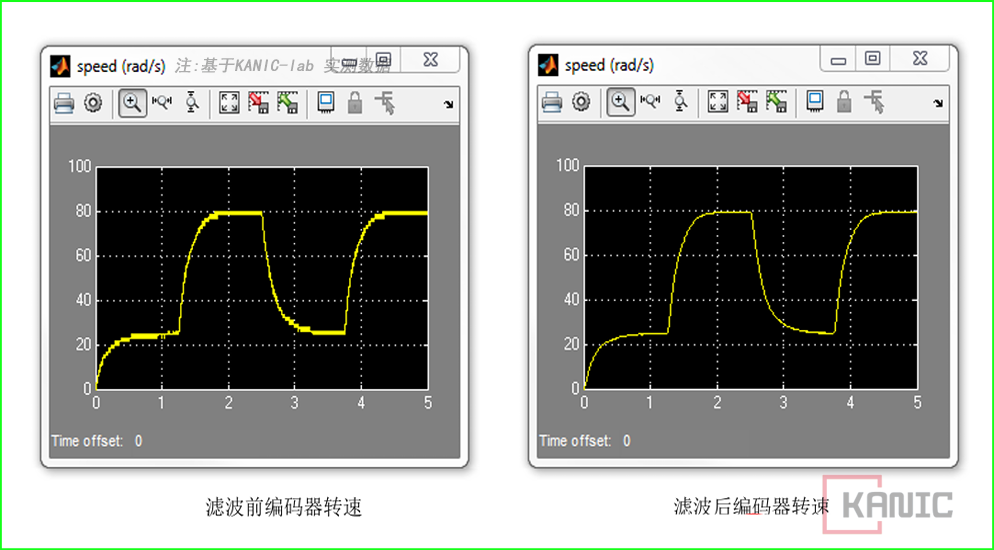
图示:左图为原始速度信号(噪声明显),右图为滤波后信号(平滑稳定)
温馨提示
编码器速度噪声不是编码器坏了,而是“用离散脉冲去做微分”这一操作,本身就会制造噪声。滤波不是锦上添花,而是速度计算里不可缺的一步。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号