【液压气动】升沉补偿系统自适应控制研究-EXP-PI控制-升沉补偿
升沉补偿系统自适应控制研究-EXP-PI控制-升沉补偿
实验目的
摘要:
针对升沉补偿系统,设计并搭建了一套升沉补偿实验平台。考虑到传统 PI 控制器在复杂海况下适应性不足的问题,提出了一种模糊 PI 控制方法,通过引入模糊控制规则对 PI 参数进行在线自整定,实现控制参数的自适应优化。
实验结果表明,在不同波浪周期和幅值条件下,所设计的模糊 PI 控制器相比传统 PI 控制具有更好的自适应能力、更高的补偿精度以及更优的系统稳定性,能够有效提升升沉补偿系统在复杂工况下的控制性能。
关键字:
- 升沉补偿系统
- 模糊 PI 控制
- 参数自整定
注:本文仅从实验系统与工程实现角度进行记录。
实验系统整体结构
下图为根据实验内容整理的系统结构框图。
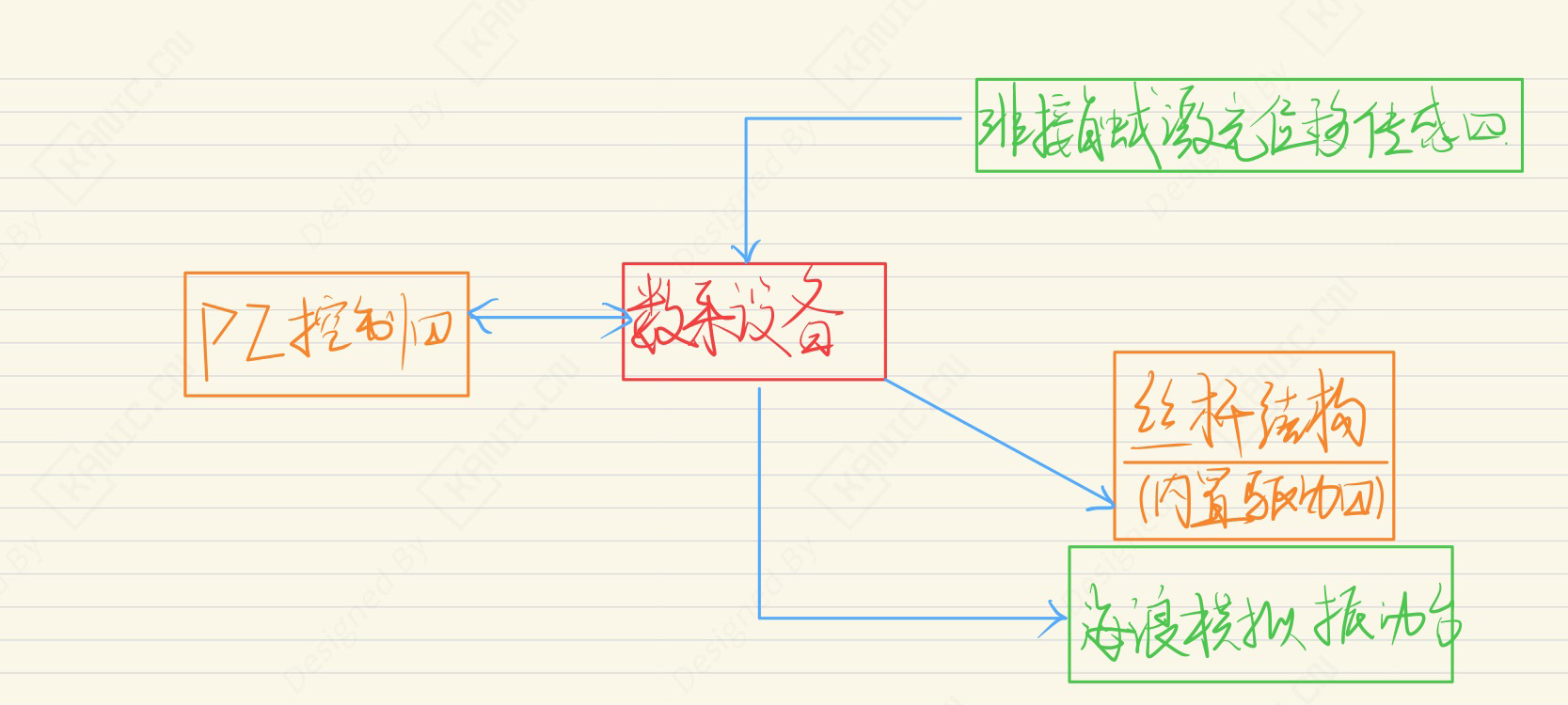
关键信号与实验流程说明
- 六自由度振动台模拟海浪波,推动安装在振动台上面的丝杆结构上下运动。
- 非接触式激光传感器实时测量丝杆垂直位移
- 信号经数据采集反馈至 PI 控制器,与期望值比较形成闭环控制,计算补偿方向与速度指令
- 方向与速度指令驱动丝杆运动,实现升沉补偿
说明:仅记录信号在系统中的流向与作用,不涉及控制算法或具体参数。
实验数据与现场
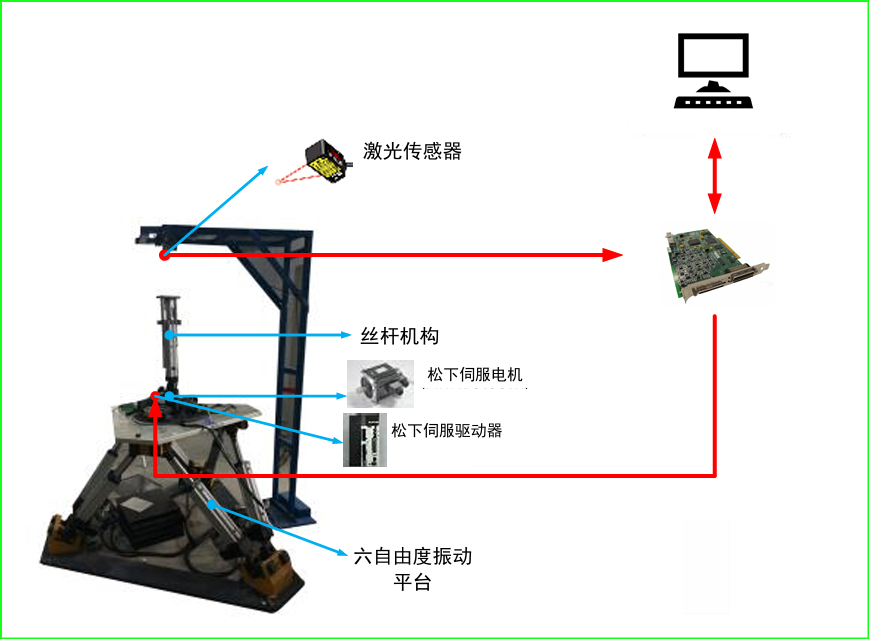
说明
结构框图来源于实际实验平台验证后的通用实现形式,细节根据具体硬件版本略有差异。
涉及的部分硬件
- 六自由度振动平台 QUANSER Hexapod
- 伺服驱动与电机 Panasonic MHMD042G1U ,MBDHT2510E
- 激光传感器 Panasonic HG-C1400
以上配置仅用于说明实验背景,不同应用场景下可采用等效方案。
交流说明
本文首发于【GitHub/Gitee】,作者:KANIC,研究方向为 自动化实验平台、控制算法验证及半实物仿真系统。
相关实验或程序已整理至 GitHub,可在 GitHub 平台搜索 KANIC-lab/KANIC 查看。
如需进一步讨论,可私信联系,并注明文章编号。文章编号位于标题末尾,以字母开头如“EXP-XXXX-XXX”


 浙公网安备 33010602011771号
浙公网安备 33010602011771号