erhdtghersdfgfdgad123sgfvsdfgvfsdgs (学习笔记)
目录
一、竞赛概述 1.1 全国大学生智能车竞赛介绍 1.2 第 21 届竞赛背景与核心变革 (1) 硬件盲盒 +现场编程的“双盲”机制 (2) 零裁判+全员办赛模式: (3) 放宽队伍数量和个人参赛组别限制: (4) 成本 1.3 新增组别与技术亮点 (1) 微缩组别: (2) 室内组别动向:
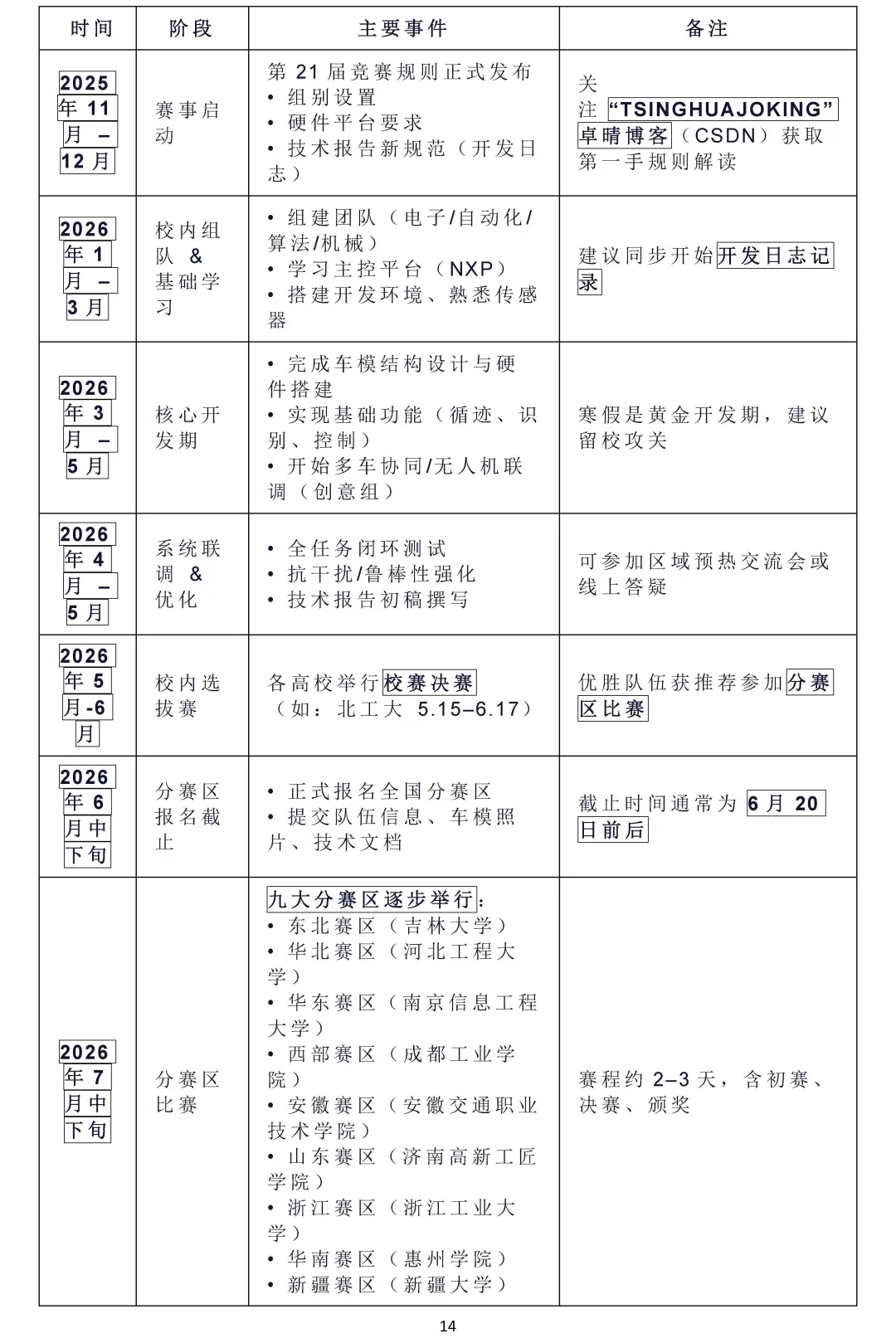
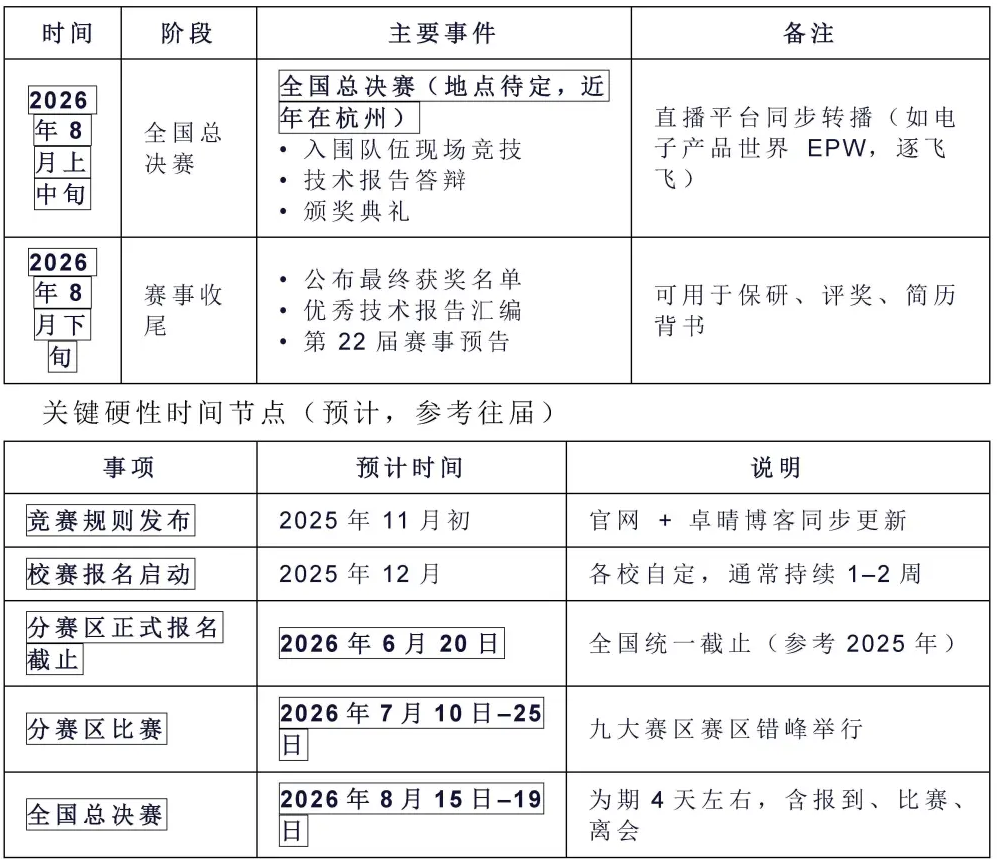
1.4 竞赛时间线与关键节点
二、规则深度解析 2.1 硬件规范与强制性要求 (1) 主控平台强制绑定 (2) PCB 制作规范(重大变革!) (3) 车模重量与成绩关联 2.2 增强现实裁判系统交互规则 2.3 技术报告真实性鉴定体系 (1) 开发日志 (2) 原始过程数据 (3) 现场复现能力
三、核心技术能力要求及学习规划 3.1 硬件工程能力 3.2 结构与控制 模块 2: 运动控制与鲁棒性 3.3 视觉图像/循迹算法 模块2:特征提取(扫线算法) . 3.4 AI元素 35 走马观碑组
四、备赛路径规划 4.1 基础阶段(2024.12):组队筑基,明确方向 4.2 学习阶段(2025.1-3):技术攻坚,模块突破 4.3 整合阶段(2025.4-6):系统集成,全任务闭环 4.3“交流”调试阶段(2025.6-7):赛场验证,冲刺国奖
五、 必备学习资源 5.1 官方文档与开发指南 5.2 交流群与消息发布 5.3 历届获奖团队技术报告参考
六、参赛准备清单 6.1 硬件设备采购清单 6.2 软件环境配置指南 6.3 技术报告撰写模板
七、后记
一、竞赛概述
1.0 全国大学生智能车竞赛介绍 赛事起源与历史:全国大学生智能汽车竞赛始于2005年10月,由教育部高等教育司委托,教育部高等学校自动化专业教学指导分委员会主办,恩智浦(中国)管理有限公司协办。
2008年起被教育部批准列入国家教学质量与教学改革工程资助项目, 2020年转为中国自动化学会主办,已成为教育部认可的A类赛事。
发展历程:2005 年:第一届竞赛创办。2008 年:列入国家教学质量与教学改革工程资助项目。2020年:转为中国自动化学会主办2025年:已成功举办第二十届,累计吸引65万人次参赛。
赛事定位与指导思想:竞赛以"立足培养、重在参与、鼓励探索、追求卓越"为指导思想,是一项面向全国大学生的探索性工程实践活动。
它以"设计制作全自主智能模型汽车"为任务核心,旨在:培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事工程技术开发和科学研究探索的兴趣,倡导理论联系实际、求真务实的学风和团队协作的人文精神。
赛事规模与影响力:覆盖范围:全国 500 多所高校,超 10 万名学生参与。赛事规模: 2025年第二十届全国总决赛有820支队伍、3126名选手参赛。
赛事地位:常年入选教育部高教学会《全国普通高校大学生竞赛分析报告》竞赛目录,是教育部认可的A类赛事。
1.1第21届竞赛背景与核心变革新
内容一键浏览: 第二十一届全国大学生智能汽车竞赛比赛规则 21届智能车规则-CSDN 博客
1.取消原“气垫车模”“独轮车模”。
2.取消了强制充电组别,但不禁止充电。
3.新增“卡丁车组”。
4.允许个人参与多个组别:两个基础组和一个创意组。
5·取消裁判,由选手自己在规定时间内在指定平台上传最佳循迹视频作为比赛证明。
6.所有参赛队伍需统一参与盲盒环节。 现场 10%人需完成两项任务: 按要求现场编程。
联合嘉立创进行硬件溯源核查并核查硬件版本迭代情况。
车模等竞赛用品成本可能会有所降低(新组别例外)。 车模均允许增加负压以增加车模抓地能力。2
人工智能组倾向于 AR 技术(增强现实)。 个人看法:
1,硬件盲盒+现场编程的“双盲”机制:
(1)能提前过滤备赛不充分,甚至“整车代练”的队伍,减少“凑数”情况。
(2)盲盒任务难度难以平衡,因为硬件溯源和现场编程若难度过高,就可能导致部分备赛方向偏科,但同样优秀的队伍被淘汰。
2. 零裁判 + 全员办赛模式:
(1)既节省人力成本,又通过赛道自建、清理让队伍提前熟悉场地,这样也不会有大异议。
(2)比赛时间监管细则场地人多眼杂,管理混乱。
3.放宽队伍数量和个人参赛组别限制:
(1)给某些学校和学生更多尝试空间,尤其人少但有余力的学校,有多个优质项目的团队的学校等等。
(2)校内挂名,大意分心,希望依据个人实情来做决定。
4. 成本 比较针对比较“新”的组别。
1.2 新增组别与技术亮点
o可参考视频:第21届竞赛已经悄然开启_哔哩哔哩_bilibili微缩组别:
1. 疯狂电路:在 20届缩微组的赛道元素按照电路图进行改造,车模整体与20届微缩光电类似(自制,车模类型无限制不要求,可抄去年网上结构,尤其是山大与山师大开源结构,无刷\有刷电机今年应该也不设限)。采用分科目比赛的模式,三个科目从简单到复杂。本组别感觉还是更注重视觉元素与路线选择,都为新玩法,需要进一步探索。图像方面因为赛道引导线与去年差不多较窄,再考虑到渐变区间 3
和光线干扰的话,建议采用二值化的策略实现元素识别,具体策略就不赘述了。 疯狂电路赛道制作
(1)自制富微轻量车横,利用光电或者摄像头传感器导引车横,在电路图客道上运行,通过电路中所有电路回路。 编微疯狂电路电路赛道
(2)赛溢引导方式为白色电路,电路中包括常见的电子元器件,具体规格参见《智能车充高疯狂电路相比赛道制作说明与计分标准》。
(3)电路回路中元器件中心设置有车模通过检测传感 光电管英飞凌摄像头IMU AURIX 自制 三 人 船,能够检测车模是否通过该器件;
(4)电路图中包括有绝修区域,其中设置有车楼通过检测传成器,检测车模是否通过绝缘区域。
比赛计分 每个科目比赛成绩包括有三部分:
(1)车模从发车区出发到回到发车区的比赛时间:T1.
(2) 车模在发车前的重量合算的时间:T2;
(3) 车模通过元器件的个数:N;
假设 电路中包括元器件个数为 M,那么最终比赛时间(单位:秒)为: T=T+T+(M-N)x30 其中,要求 N22. 否则算作比赛失败。
最终成绩是由三个科目时间累加起来,如果一个科目没有完赛或者放弃,该科目的成绩记为278秒
二、检测通过方法
检测车模是否通过电路中的元器件,是由铺设在赛道元器件下面的红外检测模式自动进行检测。现场能够实时显示通过元器件的个数。 示
详细解析逐飞已出可以参考:第21届 疯狂电路组 演示车模 运行演哔 哔 与 哩 哩 bilibili https://mp.weixin.qq.com/s/RL5BxhkalKkp3dAYLVbyyw
赛道制作可参考:第21 届智能车竞赛疯狂电路组比赛赛道制作说明与计分标准_第二十一届智能车-CSDN 博客
2. 飞檐走壁: 在20届的缩微光电中增加了立体赛道元素。核心循迹依然是电磁(依旧ADC差比和这一块1、),车模同上自制:考验硬件与结构能力,会采用评分制,分数随过锥桶数量以及完赛情况外,还与车模尺4
寸,重量相关,负压电机,无刷有刷均可。平面元素依旧,增加立体元素水平面、垂直面、滚筒面、以及跷跷板面等。
注意今年电磁引导线可能有所不同(电磁引导线平均电流为100mA的交变电流信号。信号的频率为20kHz。 电流强度现场可以在±90mA )。有可能采用纯硬件设计,无 MCU是可能最佳方案?
(1)自制一个培微轻量车视,利用辆导航,在具有立件元素宾道上运行两周
(2)容都引得方式角酸线,具体规胳參见 (肢线比而作目,固定电动合加 色或者彩色,是与地面颜色近,基本上无法通过光 贯电方式进行检测 趟蜓
(3)实迪立体元素包括与垂面面、满瓶、湖板与 TOF 飞 文体 光电营 STC 自制 寶道 MU 四轮有刷车模4
(4)赛迪共有线: 十字知口、蓝角电道、大边形码等元素。
(5)车楼是否出界是由赛通旁推推修间定。
详细解析逐飞已出可以参考:第 21届 飞檐走壁组 演示车模 运行演示 哔哩哔哩_bilibili 与微信公众平台
赛道制作可参考:第21 届智能车竞赛飞檐走壁组比赛赛道制作说明_智能车飞檐走壁赛道-CSDN博客
3. 蚂蚁搬家:这是一个新的组别,要求制作 3-4个缩微车模,完成固定物体的协同搬运。制作两辆搬运车模(NXP-MicroPython) ,不超过2台的辅助车模(STC) OR导引信标(STC) 。
计算成绩的车模重量需要对两辆搬运车模进行称重相加,再除以2,即两辆搬运车模的平均重量着重考验结构与硬件能力。
同时搬运车需要熟悉Python 的image模块进行实时图像处理,分类策略可以采用颜色+形状融合识别的方式,
例如: 网球:绿色+圆形(Hough Circle) 沙袋:红色/蓝色 + 方形(轮廓面积/宽高比) 泰迪熊:棕色/白色 + 不规则(模板匹配) 5
还有对于搬运车模来说定位与运动要求较高,建议制作麦轮小车,可以使用类似栅格地图的方式实现,通过信标\车模辅助进行。 而对STC感知这里的方案我不太确定, ,雷达应该不用想了,手推车的性能实在有限,且四辆车车间需要通信(蓝牙主从udp应该是最简单的解决方案了),可以选择制作雷达转发到NXP搬运车模上,此方案虽然可以完成精准定位,但是搬运车模过于臃肿与高难度,雷达制作难度可能也较高。 最简单的方案可能还是仅用信标\车模作为“俩点光源”,靠搬运车模的摄像头识别不同颜色光,来识别信标\车模位置,整体类似与20双车的识别前车模式获取位置信息,同时给信标\车模上加装ccdOR灰度镜头实现对搬运车模“二次定位”。 当然以上方案仅仅是参考具体实施也各有不同。
(1)自两个招目同国城定区域 下7车从以成单个个车车模完成康区 2加转或 厥 藏,胡、塑等 MP. 箱 Μάη 霜塘 光电管 搬运车 美 爽道4岁与配之月分有话线。车之助配元空定手分配 STC 辙车 ③印机(湖) 详细规则可见:第 21 届智能车竞赛蚂蚁搬家组搬运任务说明 21届智能车蚂蚁搬家大赛-CSDN 博客 室内组别动向:
1. 飞跃雷区组: 这是原来信标组任务的演变,车模包括有四旋翼和车模。只是对于车模进行了改动。 要求车模包括两部分,一部分是悬停飞机,一部分是车模。 他们之间通过不超过1.5米的线缆连接。 两者之间协同运行完成信标检测和压过,车模通过电缆给四旋翼提供电源;四旋翼完成信标的检测和车模运行的指挥。信标系统可以302A我印象里还有 EI 灵話 加果所支新个让车数! 物在指新 重铁 6
可以控制成本。 信标赛题核心还是控制,依旧飞行器红外镜头识别可解,与车模有线通信运行,当然要想完赛的话可以依旧邪修惯导。
跟随定位可使用通信实现,整体信标思路依旧不变, 5-7米的场地之下很难说哪种车模会有较大优势。(可能依旧麦轮?)
1鲜-般注動-的可通動飞量 在的新上成断 全织片在新:就规(飞ອ根与缓跳族) 鈉飞东平面 2-15 总的 默光电营 TOF 懿版 MU 餅 麵 新上关光强 以上可黑 英雄TRAIEO 幼註上蓬回砝,肝劃頂放跳 沒明髅联酸印配日题让不勵決晒狗 斯 选
详细规则可见:第21 届智能车竞赛飞跃雷区组比赛车模与比赛场地说明 智能车竞赛 飞跃雷区-CSDN 博客
目前可参考轮趣科技的方案:轮趣科技R3系列智能小车底盘与F570四旋翼飞行器默契联动,第21届全国大学生智能汽车竞赛飞跃雷区硬件效果演示_哔哩哔哩_bilibili
2. 走马观碑组: 这是原来室内龙芯组别的演变,在赛道上会有特定的平面图片,整体的形式可以看作20届智能车视觉组车模换做三轮,车模在行进过程中能够识别其中图像做出该类型的图像并做出动作。依旧传统元素竞速加上 yolo 模型这一块\、 7
详细规则可见:第21 届智能车竞赛走马观碑组比赛场地与目标板说明 21 届智能车 csdn-CSDN博客
注意本组别硬件平台与其他不同,对新手来讲,其他基本上都可以裸机开发,本组别需要学习liunx系统操作,
这里可以看一下龙邱的liunx教程或者韦东山教程(直接备战就业\狗头)资料如下:
龙邱科技视频专辑-龙邱科技视频合集-哔哩哔哩视频
RK3288 开发板 —百问网资料下载中心 3.0 文档
3. 燕过留痕组: 使用今年 STC 最新出品的“高性能”STC32G144K 单 片机! Ai STIC 送本身就是表情包 CAN两组,USB, 32位8051, 32G12K128,高精准12位ADC,DM 文分不能外部里位的单片机 福初定仿典不片 +信银17 字节SRAM ISPIAP技术创新厂商ם 32位 8051 我处理特 决 s 精功转,应低的 多0十吉时 发出了意法半导体和C语言声音 无语,和你说不下去用美国芯片的汉奸 说白了就是25年的电赛控制题目。
传统pvc赛道,某些赛道上放置感光纸识别并利用紫外激光射击。依旧传统竞速,依旧传统四轮车,依旧传统图像,依旧云台控制。 8
详细规则可见:第21届智能车竞赛雁过留痕组比赛场地与紫外线感光片说明 智能车雁过留痕组-CSDN博客
思路可参考今年电赛(发出来可能已经是去年了。。。) 【电赛方案解析】超简单且很“穷”的电赛E题方案,但国一到手罗~ 哔哩哔哩_bilibili
4. 人工智能视觉组: 今年人工智能整体组别主要增加了AR元素,去年是推箱子今年依旧“推箱子”。车模虽说没有限制但最好的肯定还是用麦轮车模(运动控制精度这一块)。
虚拟现实软件获得车模方位信息依靠室内车模全局定位系统,比赛上位机虚拟现实(游戏)软件可以免费下载。
软件支持自定义地图,选手自行摆放围墙、目的地箱子、可移动箱子、炸弹的具体位置(所以纯循迹也不是不能完赛\狗头),箱子上的内容以及数字都可随意设置,从而满足同学们在调试期间的测试需求。同时上位机也会内置一些不同难度的地图供前期调试。
目前规则制定得还不够完善,估计需要等到1月初才会出详细规则,这次赛题还是比较有意思的。
技术比较复杂,但是软件东西不需要具体考虑,留给学生任务较为简单:检测到箱子→计算相对位置→规划路径→推动。技术难点主要在虚实融合+深度神经网络?动态任务识别难度可能会比较高,端到端延迟也会比较高,可以考虑使用DQN或者行为克隆模式? 9
具体实现效果:智能视觉比赛终于闭环了_哔哩哔哩_bilibili
具体规则:第21届智能车竞赛人工智能视觉组比赛细则 第二土一届智能视觉组规则-CSDN博客
提供软件:百度网盘 请输入提取码 逐飞刚上的
软件环境教程:第21 届智能车竞赛智能视觉组-虚拟游戏系统环境搭建教程 哔哩哔哩 bilibili
5. 人工智能模型组: 今年的模型组变化就比较大,着重考验大家的ai的运用\部署能力,同时车模也做出更改,速度听说有所提升,但主要还是改良了差速和悬挂结构。
具体情况可以关注还有交流群情况。【X车模体验官招 募 https://www.bilibili.com/video/BV1Fn2yB6E6c/?share_source=copy_web &vd source=6ce7f912f1d44fc8c96d62acbb3d1695.
总结下规则就是任务:在Gazebo / AirSim等仿真环境中训练控制策略(如强化学习),再部署到实车。
“模型驱动”——控制策略来自训练好的神经网络模型,而非“手调 PID”。
采用虚实融合驾驶环境:真实物理赛道+百度增强现实系统叠加虚拟元素同时应用AI技术:要求同时使用目标检测、OCR、强化学习、 视觉大模型、智能体技术等,
大概流程为:摄像头输入飞桨PaddlePaddle实现目标检测 +OCR或通过文心大模型实现虚拟路牌等标识多模态理解 + 指令解析,同时用飞桨强化学习强化泊车/速度决策。
具体比赛流程也还未知,但也可以做出充足准备,难度肯定是最大了,尤其为感知层上,虚拟元素(行人、路牌、金币)与真实环境的叠加导致 10
识别稳定性和时效性肯定是不够,但具体流程出来后定会又有新的“奇淫巧计”。 技术点 指定框架和工具 納一个型球 在精我任江 族条 目标地微防★ 飞DaddeDaddie 摄头 RK3530 字符技术 (OCR) 飞業PaddiePaddie 8髅胎 (2)智技大:目标出,、到打、大型翻 欺酿 冲屋 HEI 醒墙体A边保器 Ead 强化学习(RL)视觉大模型(VLM) 飞PaddePaddie强化学习仿真环境及算法包,
將由飞業于2026年1月提供) 文心大模型 爽重 3慧務机(工能美训)刘社 智能体技术(Agent) 文心大模型 AS力缘加 课程内容 RK3588Edgeboard (富方仅提供RK3588的9示制)时间 嘉实与讲师 (买与文心大模型:人工有能技术的全張入门》 2026年1月 与百学行师 (共强化学习解:事假在家玩销自主消车》 2026年1月 百度工程师 《文心大模型舞:视宽大模型还能这么玩》 百度工程师 (美目标准例与OCR篇:数据求象、标注到模型V练全流程 《개强现实系統篝:实体地图条件招题,其判系统解读与增强显示系統解析》 2026年1月2026年2月 百度行师2026年2月2026年3月 2 西度丁R语 《边牛が署篇:基于RK35888飞U某根型部署流程》 《左模基础两:车模应用技巧,改辆及编护照結》 2026年3月 百度工经济百度工程师 《车模进新算:高速情况下的车辆改装技巧、湿移美略设计与面向A理强的适应性结构设计》 百度工程师 《车模进阶辆:车模外观的建模设计》 2025年3月 百季工程师 时刻关注培训捏 区域线下培训 2026年3月-6月 百度工程师 具体细则:第21 届智能车竞赛人工智能模型比赛细则-CSDN博客 室外组别动向:
1. 单车定向组: 依旧平衡单车车模实现无线定向导航与搜索任务,依旧室外科目一二三四。
车模这里虽然说都允许使用往届单车、摩托车模型。新的摩托车是纯舵机单车,无动量轮(岂是如此不便之物)。
用之前的19届摩托压力包大的(主动轮纯消耗品钱包先寄了)但肯定是直接用无动量轮的“自主平衡车模”力(平衡?易如反掌!)。 任务这里没什么可以讲的,依旧 GPS,依旧惯导,依旧控制这一块。 11
具体细则:第 21 届智能车竞赛单车定向组比赛科目细则 智能车单车定向-CSDN 博客 可以参考 18届单车经验。
2. 轮腿穿越组: 将原来室内轮腿组别改在室外赛道上,完成相应的跃障、定点区域搜索和旋转、复杂路况通行等。车模这一块可以自制设计(绝不是厂商做不出来适应室外的车模哦),大小不限制,仅允许使用指定型号的电机与舵机。 任务依旧科目一二三四,依旧没什么讲的。 12
具体细则:第 21 届智能车竞赛轮腿穿越组比赛科目细则_21届智能车规则-CSDN 博客 可以参考20届气垫越野的经验以及准备。
3. 卡丁快跑组: 这是新的组别(也不完全新,每年十一月有室外赛组别与之类似),在指定的卡丁车平台上,完成城市复杂路况智能决策、动态目标协同追踪、智慧服务等,具体内容将会进一步缩小凝练成适合现场客观评判的内容。车模就是应该就是路边最常见的卡丁车捏。 科目一三绕桩迷宫?GPS+惯导秒了。
科目二是20届的科目四,通过 wifi 连接云端大语言模型实现语音指令,基本一致。
同时这个组别自由度感觉会比较高,目前公布的车模价格为 1299元成本也不是很高(五人组可能是最低了),趣味性也强(谁不喜欢玩大车呢?)。
(相 本中文 鼎嘉壽 缈苹 2): 囍C3丽 52 1C5 (3 5 车模见:改装后的卡丁车_哔哩哔哩_bilibili 整体备赛思路可以参考20届极速越野与室外赛的无人赛车组。
1.3竞赛时间线与关键节点 全年时间线总览(2025年9月-2026年8月) >H 录录 13
二、规则深度解析
总体趋势:从“单机竞速”转向“多智能体协同+复杂任务执行”,竞速类组别仍保留基础赛道能力,更多组别转向创意与协同。
2.1 硬件规范与强制性要求 三大硬性约束(21届首次全面落地)
(1)主控平台强制绑定 允许:在官方主控上扩展自研电路 禁止:更换主控芯片、使用成品开发套件(如Arduino Uno)
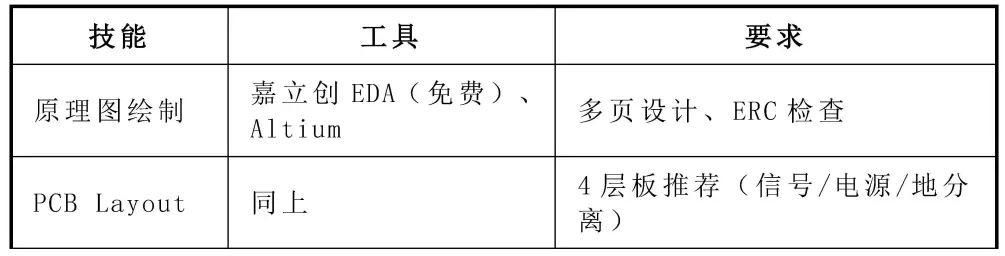
(2) PCB制作规范(重大变革!) 所有参赛队伍必须提交自制主控扩展板全流程,并强制使用嘉立创下单PCB.要求:使用嘉立创EDA / Altium等工具设计,提交Gerber 15
文件 + 焊接实物照片。电路板需包含唯一队伍 ID 丝印,杜绝“拼凑式开发”与抄板,推动工程规范化。 详细可见:第二十一届智能车竞赛电路板嘉立创制作流程规范
(3)车模重量与成绩关联 俩个微缩组别(飞檐走壁、蚂蚁搬家) “车模重量越轻,成绩加权系数越优”但计分细则还在讨论之中。 蚂蚁搬家:仅仅规定了计算车模重量方式并未公布计分细则:用于计算成绩的车模重量只对两辆搬运车模进行称重相加,再除以2,即两辆搬运车模的平均重量,不累加辅助车模的重量。
飞檐走壁:仍然未公布计分细则还在讨论之中。 车模重量不应包括电池_哔哩哔哩_bilibili 2.2增强现实裁判系统交互规则 什么是 AR 裁判系统?主要针对俩个人工智能组可能包括飞跃雷区组与卡丁快跑组的一套基于手机/平板摄像头+专用APP的辅助判罚系统。裁判或选手通过设备扫描赛道特定区域,叠加虚拟信息(如起跑线、计时点、违规提示)。 21届应用场景(仅为推测以实际为准 16
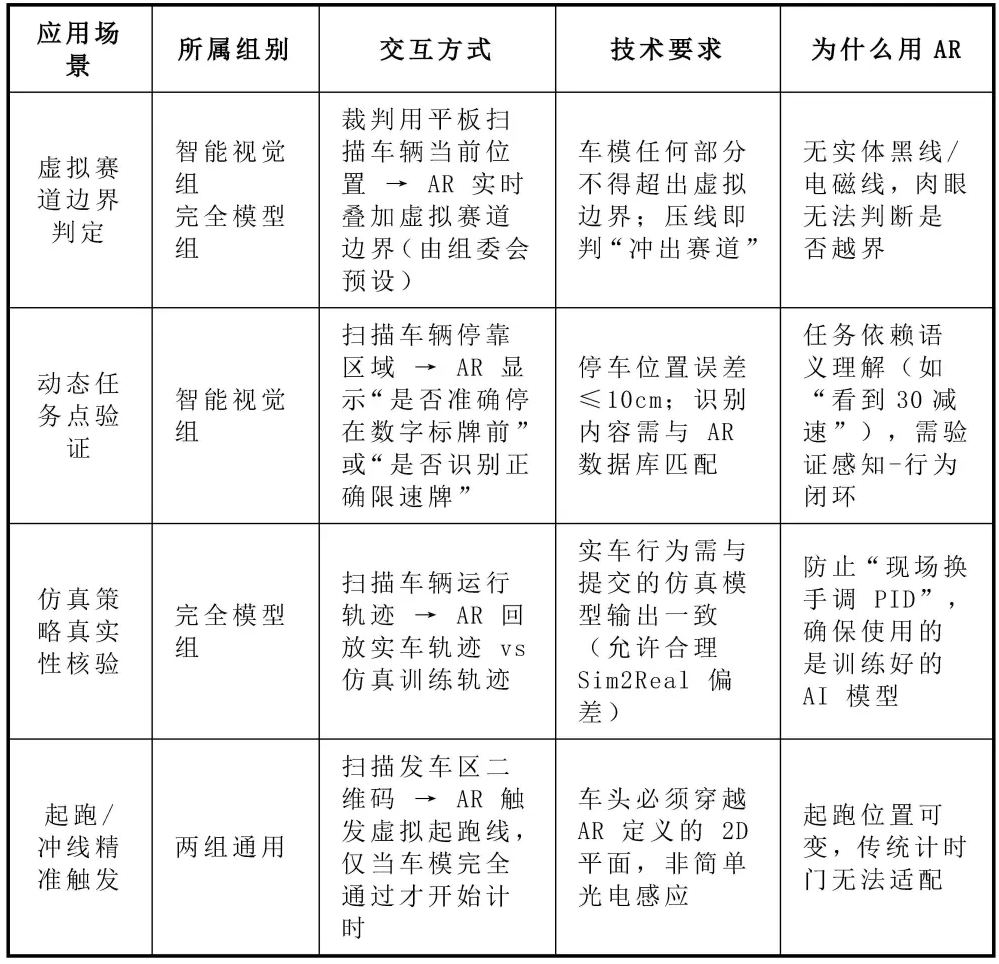
虚拟赛道边界判定:智能视觉组/完全模型组的赛道可能仅为蓝色地胶+随机贴纸,无任何引导线。赛前,组委应该会用AR设备标定整个场地,建立厘米级精度的虚拟赛道地图(含弯道、直道、禁行区)。比赛中,裁判随时可扫描任意位置,AR 自动显示:“当前车模左轮已越界3cm”。一旦越界,应该会立即终止计时,成绩无效。 参赛者需注意:比赛现场必须配合AR系统操作(主动展示车模位置)。
不接受“肉眼争议”,一切以AR系统记录为准,建议团队提前下载测试版 APP。 17
2.3技术报告真实性鉴定体系
为何要建立该体系?近年不断出现了“代做”“抄袭往届报告”等问题。21届引入全过程可追溯机制,确保“所写即所做”。需要我们准备三方面的东西。
(1)开发日志 要求:每日记录(含日期、工作内容、问题、代码片段、电路草图)格式:Markdown/Word/手写扫描均可。查重:与往届报告比对,相似度 >30% 视为可疑
(2)原始过程数据 如: Git仓库提交记录(推荐GitHub/Gitee)、示波器/逻辑分析仪抓图(带时间戳)、 调试视频片段(最简单的方式)。以此证明关键功能真实迭代过程。
(3)现场复现能力 决赛阶段盲盒任务可能要求: 现场修改参数(如改PID值后重新跑) ,编写固定逻辑功能,解释某段代码逻辑(随机抽查) ,展示PCB设计源文件以及原理,无法复现直接取消成绩捏。
三、核心技术能力要求及学习规划
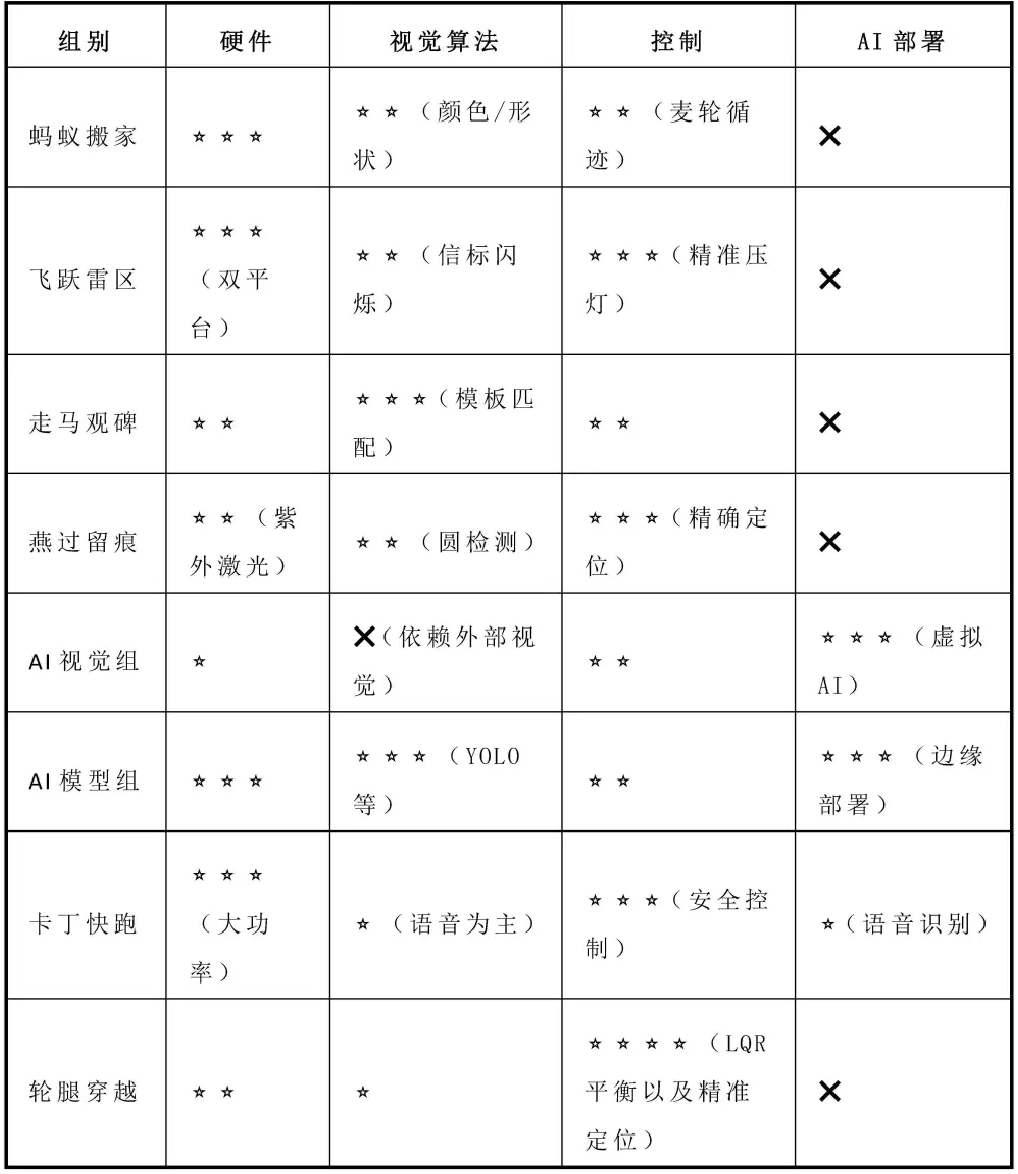
省流:四大能力与组别的映射关系(备赛选型参考) 飞檐走壁,疯狂电路,单车定向等组别均为传统有迹可循的纯竞速组别,难度应该无需讨论。 18
3.1硬件工程能力 19
核心任务:设计主控的扩展接口主板(可板集成电机驱动或设计单独驱动板) 本届赛题对硬件要求其实不高,可抄板,但必须全流程设计。具体可 参考教程: 【【教程】零基础入门PCB设计-国一学长带你学嘉立创EDA专业版 全程 保 姆 级 教 学中文字幕(大师篇已更新)】 https://www.bilibili.com/video/BV1At421h7Ui/?share_source=copy_web &vd_source=6ce7f912f1d44fc8c96d62acbb3d1695关键技能:
20

模块 2:焊接与装配 焊接等级要求:
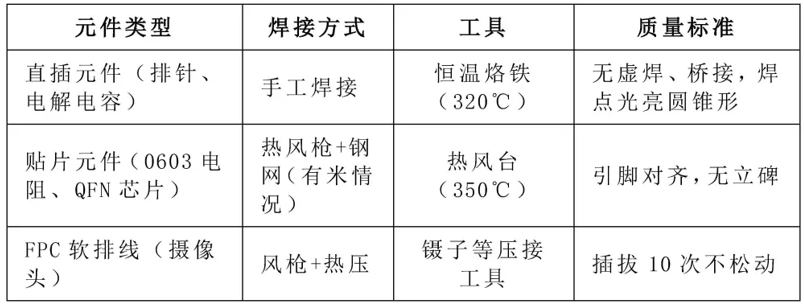
实操建议:先贴片后插件,避免热风枪吹坏已焊直插件。使用助焊膏,提升贴片焊接良率。清洗板子,焊接后用无水酒精+毛刷清除助焊剂残留。室外组别一定要板子封胶或使用保鲜膜保护,防水防沙防静电。另:富哥也可以淘宝让别人帮焊接。 避坑指南及常见问题:
1. 电机电源必须与逻辑电源隔离(用磁珠或独立LDO)
2. 摄像头供电加 100μF + 0.1μF 电容进行滤波 21
3.所有GND汇聚到单点接地,避免地环路噪声
4. 一句话经验:“电源不稳,一切归零”。 Q:“车跑着跑着突然死机,重启后又正常”看似软件Bug,实则大概率是硬件电源设计缺陷! A:电机启动瞬间电流突变(>3A),导致主控供电电压跌落至2.8V以下,AMS1117等LDO无足够输入电容,响应速度慢(>10ms)数字地与电机地未隔离,地弹噪声触发MCU复位。
5.摄像头问题90%出在板子上,不在代码里! Q:摄像头图像全是条纹/花屏,换线也没用 A:不一定是摄像头坏了,是高速信号完整性崩坏PCLK>8MHz,但走线过长(>15cm)且未做阻抗控制,FIFO数据线与电机线平行走线导致串扰引入毛刺,或未使用等长走线,导致建立/保持时间违规。解决方案有, PCLK走线<8cm,两侧包地, DATA[7:0]等长控制(长度差<5mm) ,所有高速线远离电机驱动、电源线(间距>3mm) 。在PCLK线上串联22Ω电阻(靠近摄像头端),抑制振铃。FIFO电源脚加 10μF + 100nF 电容(紧贴引脚)等。
6.设计没有问题,焊接完通电冒烟,芯片烧了,原因多是电池正负极接反,调试时探针短路相邻引脚,肖特基二极管,钳位二极管反接,mos管过流等原因。 学习与实践路线
阶段 1:基础训练(1-2 周) 学会使用嘉立创 EDA 绘制简单双面板,掌握 0603 贴片焊接搭建DRV8701电机驱动的设计焊接与测试。
阶段 2:模块集成(2-4 周) 完成主控扩展板设计(考虑车模整体结构),实现多传感器数据 采集,测试电源纹波(示波器观察。 22
阶段 3:系统优化(持续) 迭代轻量化结构,优化EMC性能,制作无线调试接口等
3.2 结构与控制
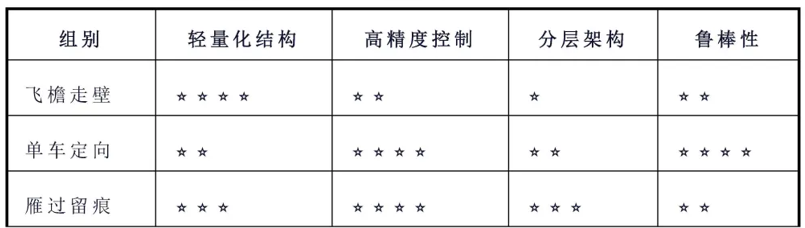
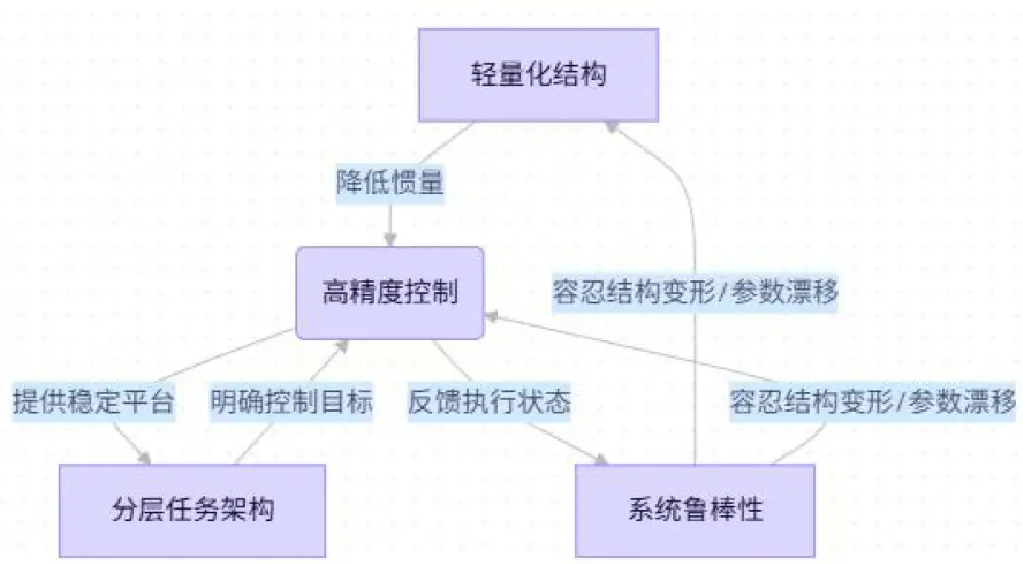
PID里P调大增快响应速度 核心目标: 结构:构建轻量化、高刚度的机械平台,为高精度控制提供物理基础 控制:实现亚厘米级定位或毫弧度级姿态稳定,并在参数漂移、环境扰动下保持任务完成能力。 二者必须协同设计——结构决定控制上限,控制暴露结构缺陷。 依旧省流,四大能力与组别的匹配强度:
23

建议先有一定自控基础再来看本教程,这是一个简单的智能车控制与结构介绍:智能车设计控制算法和机械结构(献给实验室萌新,允许我有点草率了)-哔哩哔哩-bilibili绍)
模块1:结构设计与装配 其实这块我其实也不是很懂懂来的,,可以多看看网上的教程问问参加过的机械学长。。 24
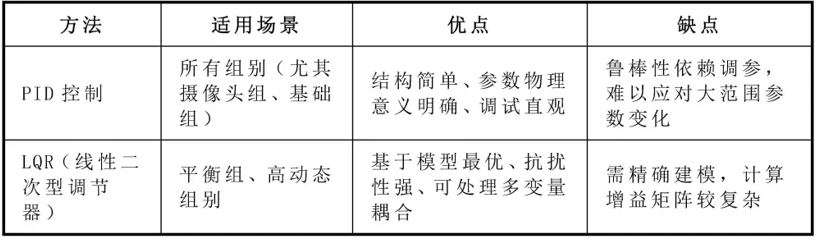
模块 2:运动控制与鲁棒性 智能车的控制系统本质上是一个多环节闭环反馈系统,通用结构如下: [任务目标] [轨迹规划/目标生成] [控制器(决策核心)]+[状态估计器] [执行指令(如PWM) ] + [电机驱动] + [机械执行机构] [传感器反馈] + [编码器/IMU等] 该架构适用于所有组别,区别仅在于: 任务目标不同:位置控制、循迹(速度+方向控制)、平衡(姿态控制); 状态变量不同:位置、速度、角度、角速度等; 性能指标不同:精度、稳定性、响应时间等。
具体学习可参考视频:【从放弃到精通!卡尔曼滤波从理论到实践 https://www.bilibili.com/video/BV1Rh41117MT/?share_source=copy_web&vd_source=6ce7f912f1d44fc8c96d62acbb3d1695 特殊组别需注意:
26
控制器的具体实现与调参就不过多赘述了网上的教程也很多,这里讲一下所谓模糊 pid,自适应 pid 无非是采用可变参数提高鲁棒性,这点注意一下。
核心子系统3:前馈补偿 反馈控制能消除稳态误差,但对已知干扰反应滞后。前馈则直接“预判”并抵消这些干扰。
因为存在部分非线性因素:如电机静摩擦力大,小指令无法启动,需叠加一个最小启动电压,从发出PWM到电机产生力矩有10-20ms延迟,停驻前需提前施加反向制动。
斜坡上需额外力矩平衡重力需要根据倾角实时补偿。还有电压降低导致相同PWM输出力矩减小需要按电压比例放大指令。
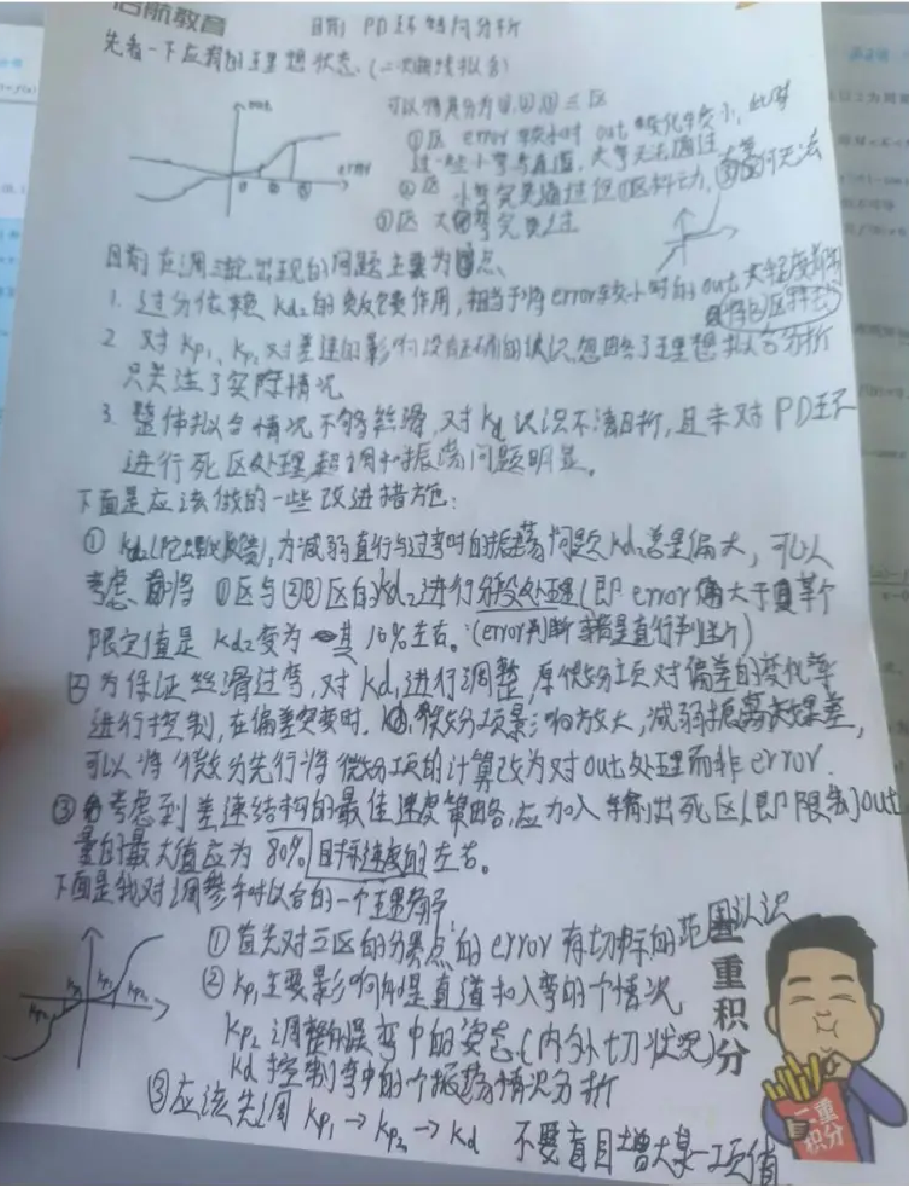
实现方式:通过实验标定补偿量,构建查表或解析公式,在控制输出端直接叠加。 鲁棒性是一件很难系统总结的特性这里列出部分组别的可能鲁棒性问题大家可以分析下解决方案。
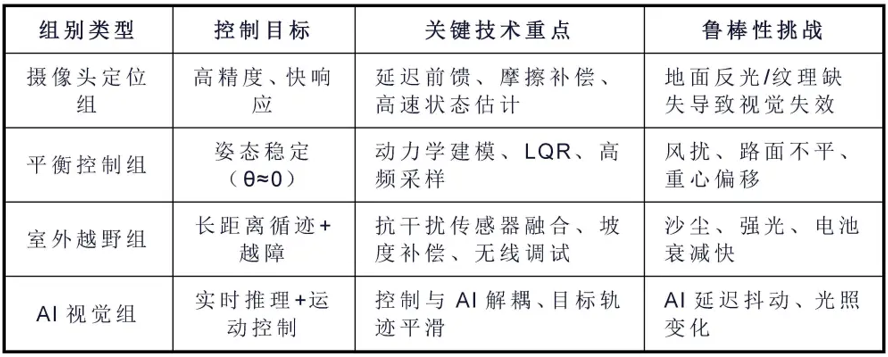
附一张之前的关于转向环的备赛笔记(学长字很丑了,将就看看 吧) 27
模块 3:分层任务架构 首先要明白智能车竞赛的实际开发中,绝大多数队伍使用裸机开发,不依赖RTOS,而是通过“主循环+硬件定时中断”的轻量架构实现多任务协同。所以我们需要任务分层来保证代码的良好结构与可读性。不如我们会遇到下面很多棘手的问题由于代码混乱还不知从何下手: 问题1:加了摄像头后,小车开始“抽搐”→因为图像处理占用了太多时间,电机控制被推迟。 28
问题2:蓝牙打印调试信息时,车突然失控→因为printf阻塞了主循环,错过控制时机。 问题3:识别到横线却没停住→因为视觉结果还没传给控制模块,任务之间“失联”。 这些问题的根源,不是算法不行,而是任务安排混乱。 需要我们按重要性把任务分层,严格规定谁先干、谁后干、怎么传话,讲所有的任务分为三层,每层有明确职责和执行节奏。 层级 干什么? 多久干一次? 谁来触发? 能不能被打断? L1:控制层 读编码器、算PID、输出PWM 每 5 毫秒(200Hz) 硬件定时器中断(PIT) 不能!中断里只做最简计算 L2:感知层 卡尔曼滤波、视觉特征提取、IMU 融合 每 10 - 20 毫秒 (50 - 100Hz) 由L1中断标记触发(如设置flag) 可以,但要快(<5ms) L3:应用层 图像预处理、蓝牙发送、日志记录、状态机决策 每 50 - 100 毫秒(10 - 20Hz) 主循环轮询执行 可以,允许被抢占 限于文字有限这里只提供思路,代码结构可搭配 ai食用捏。
3.3 视觉图像/循迹算法
所有视觉算法均遵循以下五步流水线(后两步可以不做): 29
[原始图像] [预处理:增强赛道特征,抑制干扰] [特征提取:定位赛道边界或中心] [后处理:滤波、补全、拟合] [导航输出:生成控制可用的目标点]
模块 1: 图像预处理 目标:将原始灰度图像转化为高对比度、低噪声、光照鲁棒的中间表示,便于后续提取。 方法 作用 工程要点 固定曝光与增益 避免帧间亮度跳变 手动设置曝光时间(如1/100s),禁用自动曝光 局部自适应阈值 将图像转为黑白二值图 必须使用局部方法(如Sauvola) ,全局阈值在光照不均时完全失效 轻量滤波 去除椒盐噪声,平滑边缘 3×3 中值滤波 或 高斯滤波,避免过度模糊
模块2:特征提取(扫线算法) 首先我们应该明白我们到底在“找”什么?赛道在图像中表现为一条高对比度带状区域。我们的任务就是对每一行y,找到该行上赛道的左右边界xi(y)和xr(y),进而得到中心xm(y) = (xi+xr)/2 还有,边界不是“像素颜色”,而是“颜色突变的位置”。因此,所有搜线算法的本质,都是边缘检测。这是循迹算法的核心,
主流方法有两类:对比度(梯度)扫线与二值化跳变,下面我们简单讲解一下二者,电磁循迹同样也类似,解决方法多为差比和法也是可以看作一种程度的梯度法。 30
二值化跳变点法 核心思想:将连续灰度信号强制离散为黑白二值信号,然后在二值信号中寻找状态跳变点。
这是一种非线性、阈值驱动的方法。 数学模型: 设原始灰度行为g[i]E[0,255],经阈值T二值化后得:b[i]={if g[i]>T(白色)if g[i]<T(黑色) 边界定义为满足以下条件的像素位置: 左边界:最小的i使得b[i-1]=1且b[i]=0 (白→黑) 右边界:最大的i使得b[i-1]=1且b[i]=0 对比度扫线法 核心思想:不进行二值化,直接在原始灰度信号中计算局部变化率(梯度),将梯度极大值点视为边界。这是一种线性、微分驱动的方法。 数学模型: 边界位置由灰度梯度的极值决定: xedge = argimax | ▽g(i) I 其中 ▽g(i)是灰度的一阶导数近似。 常用离散梯度算子: 前向差分: Vg(i)=g(i)-g(i-1) 中心差分(推荐) : Vg(i)=g(i+1)-g(i-1) Sobel近似: V2g(i)=g(i-1)-2g(i)+g(i+1) (二阶导,突出边缘) 维度 二值化跳变点法 对比度(梯度)扫线法 信号处理类型 非线性(阈值量化) 线性(微分运算) 输入 二值图像 原始灰度图像 输出 跳变位置(定性) 梯度极值位置(定量) 计算复杂度 极低(O(n),仅比较) 中(O(n),含 abs/减法)31
内存占用 低(需一行二值缓存) 中(需一行梯度缓存) 最佳场景 高对比度、光照可控 弱对比度、光照渐变 最怕什么 阈值不准 纹理噪声 调试难度 低(看二值图即可) 中(需看梯度图) 典型耗时(QVGA一行) ~0.1ms ~0.3ms 用于处理“赛道断裂、交叉、复杂拓扑”等异常情况的后处理或辅助策略:八邻域法与迷宫法。 八邻域法 本质是一种基于像素连通性的路径追踪算法。它将二值图像视为由“前景像素”(赛道)组成的网格,从一个已知起点出发,沿着8个方向(上、下、左、右、4个对角线)寻找相邻的前景像素,逐步“爬行”重建连续路径。 数学模型: 图像视为图 G=(V,E),其中: V:所有前景像素(如黑色赛道像素); E:若两像素在 8邻域内相邻,则存在边。 算法目标:从起点s出发,沿图G搜索一条向上延伸的最长/最直路径。 典型应用场景: 赛道有短距离断线(如5-10行缺失); 需要从底部已知点向上重建中心线; 视觉输出需为单条连续曲线(供拟合使用)。 优势:能跨越小间隙(只要两端有像素连通);可处理弯曲赛道;输出为有序点列,便于后续拟合。 缺陷:遇到T型路口、十字路口时,随机选择分支易走入歧途;孤立噪点会被当作路径,导致轨迹发散;若断线>15行,也会导致搜索空间爆炸,结果不可靠。 32迷宫法 本质是将整个二值图像视为一个“迷宫”,赛道为“可通行区域”,利用全局搜索算法(如Flood Fill、A*)寻找从起点(车头下方)到终点(图像顶部)的最优路径,将图像路径规划问题转化为图搜索问题。 常见实现方式: 洪水填充(Flood Fill):从起点开始,标记所有可达像素;回溯得到一条路径。A*算法:定义代价函数(如路径长度 +曲率惩罚); 搜索代价最小路径。 典型应用场景: AI视觉组:无固定赛道,需自主建图; 创意组:任务要求“探索未知路径”; 完全模型组:理解复杂赛道拓扑(环岛、多出口)。 优势:能处理任意复杂拓扑(十字、T型、环形);可结合高层语义(如“优先直行”“避开死胡同”)。 逆透视变换 首先直观理解下什么是逆透视变换,摄像头斜向下拍摄赛道→图像中“近大远小”,直线赛道看起来是梯形汇聚的(如下图左)。而逆透视变换把这张图“掰直”,变成从正上方看的鸟瞰图(如下图右),让赛道呈现为平行直线。 核心思想 33
利用几何投影关系,将图像中每个像素点,映射到它在地面上的真实位置(以车为原点的俯视坐标系)。本质是把“视觉像素”转换为“物理空间”表示。 数学模型: 假设: 摄像头安装高度为h(单位: mm); 摄像头光轴与地面夹角为θ(俯仰角);地面为理想平面。 则图像中某点(u,v)对应的地面坐标(X,Y)可通过以下关系计算: Y= h·f X (u – uo) • Y (υ – υρ) • sinθ + f• cos θ' f 其中:f:摄像头焦距(像素单位):(u0,v0):图像主点(通常为中心)。 实际工程中,不直接用此公式实时计算,而是通过标定得到映射表(LUT)。 实现方式:在赛道上放已知尺寸的方格纸,用OpenCV计算单应性矩阵H。生成查找表(LUT) :对目标鸟瞰图的每个位置(X,Y),反向查出它在原始图像中的位置(u,v),存成两个二维数组。或者运行时查表+插值:循环遍历鸟瞰图坐标,用LUT找到对应原始像素,通过双线性插值获取灰度值。 模块 3: 鲁棒性增强策略:
防止单帧图像异常(如闪光、阴影)导致控制突变。
难点在于虚拟目标无固定颜色/形状,且与背景融合,传统CV无法泛化。 子任务 技术方案 模型选型 输出 交通标志检测 目标检测 YOLO/PP-YOLOE-Lite (x, y, w, h, class) 文字识别(OCR) 文本检测+识别 PSENet + CRNN / SVTR(应该是直接有提供固定模型) 字符串 行人/车辆检测 目标检测 NanoDet / YOLO 类别+位置 车道线理解 语义分割 or关键点 Ultra-Fast-Lane / Line-CNN 车道中心线 人工智能视觉组 任务本质是车载摄像头拍摄固定液晶屏(如手机)上的游戏画面(如推箱子、迷宫);
模型选型相对自由,我推荐我之前用过的SqueezeNet 自采数据:用手机拍摄 10 类图片,每类 ≥200 张; 增强策略:随机旋转(±15°)、亮度(±30%)、模糊(kernel=3);模拟车载视角(俯拍 + 裁剪)。 总结一下三个组别: 维度 人工智能模型组 人工智能视觉组 走马观碑组 AI 角色 感知+决策核心 感知前端 单一分类模块 模型复杂度 高(检测+OCR) 中(检测/分类) 低(分类) 硬件平台 RK3588 / EdgeBoard NXP视觉平台 龙芯 2K0300 典型延迟 30-50ms 20-80ms 20-30ms 最大挑战 多任务调度 MCU 算力 数据泛化 四、备赛路径规划 4.1 基础阶段(2024.12) :组队筑基,明确方向 组好队伍散热组别基本上俩人足以,一硬一软,选准组别,搭好开发环境,学习基本知识。
五、必备学习资源
六、参赛准备清单
第21届全国大学生智能汽车竞赛1北京科宇公司车模清单 北京科宇 智能车-CSDN 博客 第21届全国大学生智能汽车竞赛1博思威龙车模清单-CSDN博客
七、后记
智能车竞赛,它可能不是最适合“保研加分”的比赛甚至可以说是性价 比最低。但我认为它从来不是只为争夺名次而设,是一场关于动手、 思考、协作与创造的工科学生成人礼。你将亲手焊接电路,调试代码,校准摄像头,优化控制。在一次次小车冲出赛道又推回起点的过程 中,磨砺的不仅是技术,更是心性。不必焦虑自己是否“起步太晚”,也不必担忧平台是否“不够先进”。历史上无数优秀的工程师,并非赢 在起跑线,而是赢在从未停下脚步。一块开发板、一个摄像头、一段 赛道,足以孕育创新的火种。重要的不是你拥有什么,而是你愿意用 双手去构建什么。智能车竞赛的终点,不是领奖台,而是那个更沉稳、 更自信、更有工程素养的你自己。所以,大胆开题吧!哪怕方案尚不 完美,哪怕技术尚未成熟。路,不在远方的奖杯里,就在你此刻俯身 调试的指尖下。
https://gitee.com/powes/,作者:前沿风暴,转载请注明原文链接:https://www.cnblogs.com/Kreos/p/19470705

 浙公网安备 33010602011771号
浙公网安备 33010602011771号