
https://docs.opencv.org/2.4/doc/tutorials/imgproc/imgtrans/sobel_derivatives/sobel_derivatives.html
OpenCV 2.4 C++ 边缘梯度计算 --- sobel 使用说明
Sobel算子
Sobel 算子是一个离散微分算子 (discrete differentiation operator)。 它结合了高斯平滑和微分求导,用来计算图像灰度函数的近似梯度。
一.基础知识介绍
[1]图像的边缘
图像的边缘从数学上是如何表示的呢?
图像的边缘上,邻近的像素值应当显著地改变了。而在数学上,导数是表示改变快慢的一种方法,一个函数在某一点的导数描述了这个函数在这一点附近的变化率。
梯度可谓是多元函数的偏导,表示某一函数在该点处的方向导数沿着该方向取得最大值,即函数在该点处沿着该方向(此梯度的方向)变化最快,变化率最大(为该梯度的模)。。
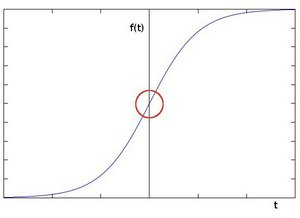
用更加形象的图像来解释,假设我们有一张一维图形。下图中灰度值的“跃升”表示边缘的存在:
使用一阶微分求导我们可以更加清晰的看到边缘“跃升”的存在(这里显示为高峰值):
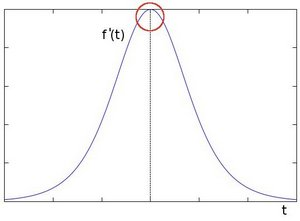
由此我们可以得出:边缘可以通过定位梯度值大于邻域的相素的方法找到。
[2]卷积
卷积可以近似地表示求导运算。
那么卷积是什么呢?
卷积是在每一个图像块与某个算子(核)之间进行的运算。
核呢?
核就是一个固定大小的数值数组。该数组带有一个锚点 ,一般位于数组中央。
可是这怎么运算啊?
假如你想得到图像的某个特定位置的卷积值,可用下列方法计算:
- 将核的锚点放在该特定位置的像素上,同时,核内的其他值与该像素邻域的各像素重合;
- 将核内各值与相应像素值相乘,并将乘积相加;
- 将所得结果放到与锚点对应的像素上;
- 对图像所有像素重复上述过程。
用公式表示上述过程如下:
在图像边缘的卷积怎么办呢?
计算卷积前,OpenCV通过复制源图像的边界创建虚拟像素,这样边缘的地方也有足够像素计算卷积了。
二.Sobel的卷积实现
Sobel是采用卷积的计算方法实现的。假设被作用的图像为 ,在两个方向上求导:
,在两个方向上求导:
水平变化求导:将 与一个奇数大小的内核  进行卷积。比如,当内核大小为3时, 的计算结果为图1
进行卷积。比如,当内核大小为3时, 的计算结果为图1
垂直变化求导:将 I 与一个奇数大小的内核  进行卷积。比如,当内核大小为3时, 的计算结果为图2
进行卷积。比如,当内核大小为3时, 的计算结果为图2
在图像的每一点,结合以上两个结果求出近似梯度大小 ,如图3
计算梯度方向,如图4 (如果以上的角度Θ等于零,即代表图像该处拥有纵向边缘,左方较右方暗)
图1 图2 图3 图4
三.Code
先来看一下C++下 Sobel 的定义 cv:Sobel( InputArray src , OutputArray dst, int ddepth, int dx, int dy, int ksize=3, double scale=1,double delta=0,intborderType=BORDER_DEFAULT ) 各参数的意义如下: src – 输入图像。
dst – 输出图像,与输入图像同样大小,拥有同样个数的通道。 ddepth –输出图片深度;下面是输入图像支持深度和输出图像支持深度的关系: src.depth() = CV_8U, ddepth = -1/CV_16S/CV_32F/CV_64F src.depth() = CV_16U/CV_16S, ddepth = -1/CV_32F/CV_64F src.depth() = CV_32F, ddepth = -1/CV_32F/CV_64F src.depth() = CV_64F, ddepth = -1/CV_64F 当 ddepth为-1时, 输出图像将和输入图像有相同的深度。输入8位图像则会截取顶端的导数。 xorder – x方向导数运算参数。
yorder – y方向导数运算参数。 ksize – Sobel内核的大小,可以是:1,3,5,7。 注意:只可以是小于7 的奇数 scale – 可选的缩放导数的比例常数。
delta – 可选的增量常数被叠加到导数中。
borderType – 用于判断图像边界的模式。
#include "opencv2/imgproc/imgproc.hpp" #include "opencv2/highgui/highgui.hpp" #include <stdlib.h> #include <stdio.h> using namespace cv; /** @function main */ int main( int argc, char** argv ) { Mat src, src_gray; Mat grad; char* window_name = "Sobel Demo - Simple Edge Detector"; int scale = 1; int delta = 0; int ddepth = CV_16S; int c; /// Load an image src = imread( argv[1] ); if( !src.data ) { return -1; }
///高斯模糊---apply a GaussianBlur to our image to reduce the noise ( kernel size = 3 ) GaussianBlur( src, src, Size(3,3), 0, 0, BORDER_DEFAULT ); /// Convert it to gray cvtColor( src, src_gray, CV_BGR2GRAY ); /// Create window namedWindow( window_name, CV_WINDOW_AUTOSIZE );
///calculate the “derivatives” in x and y directions /// Generate grad_x and grad_y Mat grad_x, grad_y; Mat abs_grad_x, abs_grad_y; /// Gradient X //Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT ); Sobel( src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT ); convertScaleAbs( grad_x, abs_grad_x ); //convert our partial results back to CV_8U /// Gradient Y //Scharr( src_gray, grad_y, ddepth, 0, 1, scale, delta, BORDER_DEFAULT ); Sobel( src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT ); convertScaleAbs( grad_y, abs_grad_y ); /// Total Gradient (approximate近似)---we try to approximate the gradient by adding both directional gradients
(note that this is not an exact calculation at all! but it is good for our purposes). addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad ); imshow( window_name, grad ); waitKey(0); return 0; }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号