柏林噪声
然后我们来讨论一下一维、二维柏林噪声的原理。
1、一维柏林噪声
首先,在X轴向上每个整数坐标随机生成一个数(范围为-1~1),我们称这个数为Gradient,译为梯度或者斜率。然后我们对相邻两个整数之间使用梯度进行插值计算,使得相邻两点之间平滑过渡。平滑度取决于所选用的插值函数,老版的柏林噪声使用f(t)= 3 * t * t-2 * t * t * t,改进后的柏林噪声使用f(t)=t * t * t * (t * (t * 6-15)+10)。
如图所示:
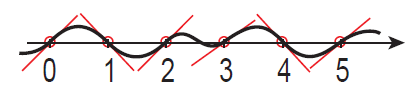
上图来自于KenPerlin的Simplex Noise论文,论文中提到了经典的柏林噪声定义。
2、二维柏林噪声
对于二维来说我们可以获取点P(x, y)最近的四个整数点ABCD,ABCD四个点的坐标分别为A(i, j)、B(i+1, j)、C(i, j+1)、D(i+1, j+1),随后获取ABCD四点的二维梯度值G(A)、G(B)、G(C)、G(D),并且算出ABCD到P点的向量AP、BP、CP以及DP。如下图所示:
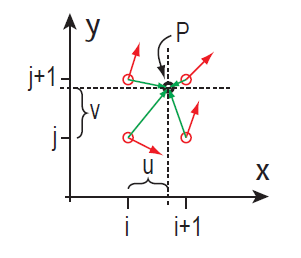
红色箭头表示该点处的梯度值,绿色箭头表示该点到P点的向量。
接着,将G(A)与AP进行点乘,计算出A点对于P点的梯度贡献值,然后分别算出其余三个点对P点的梯度贡献值,最后将(u, v)代入插值函数中算出P点的最终噪声值。
以上类推到三维的柏林噪声,则需要算出八个顶点的梯度贡献值,然后进行插值计算。
还有一个问题没有解决,就是怎样随机生成梯度值。当然你可以通过使用一个伪随机函数生成一维到三维的梯度值(二维和三维就是梯度向量了),例如,对于一维可以使用下面的公式:
Fract(Sin(n)753.5453123f);
另外一种,也是柏林使用的,是预先生成256个伪随机的梯度值(以及二维和三维的梯度向量)保存在G1[256]、G2[256][2]]以及G3[256][3]中,然后对于一维柏林噪声来说,我们可以直接去取G1[]数组中的梯度值使用,对于二维或者三维的怎么办?柏林预先又生成了一个排列P[256],将0~255的下标随机存放在P数组中,然后通过下面公式来取到随机的梯度值:
G2[P[x] + y] ——二维
G3[P[P[x] + y] +z] ——三维
以上就完成了随机取梯度值的算法。
当然,这里还要提一下在Improved Noise论文中柏林对于三维柏林噪声的改进。在论文中柏林的第一个改进就是插值函数的改进,也就是我们上面提到过的f(t)=ttt(t(t6-15)+10),它使得插值出来的噪声值更平滑了,特别是在三维中。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号