二维变换
为了在图像中指定一个位置,我们需要一种规范来实现。这种规范通过坐标系来设定。HALCON中使用了不同的坐标系。在此,我们解释二维中使用的坐标系。
像素是离散的,为了定位它们,我们有一个仅使用整数值的坐标系,即像素坐标系。为了获得超出像素网格的更高精度,我们需要浮点坐标,例如(3.6, 4.1) 。这就产生了亚像素精确坐标系。在HALCON中,有三种不同的亚像素坐标系实现方式:
-
像素居中坐标,HALCON标准亚像素坐标系
-
边缘居中坐标
-
极坐标
其中前两种仅在坐标原点上有所不同,如下图所示。校准使得将图像坐标距离映射到实际世界距离成为可能。有关这些校准坐标的更多信息,请参考《解决方案指南III - C - 3D视觉》。
HALCON标准坐标系
像素精度坐标系
像素坐标系将图像视为由离散元素(像素)组成的网格。在HALCON中,我们将原点(0, 0)置于左上角像素的中间。现在,我们像在矩阵中一样指定像素坐标,确定其行和列。
请注意,对于大小为高度×宽度 = m×n像素的图像,这意味着行坐标值范围是从0到m - 1,列坐标值范围是从0到n - 1,如下图所示。
亚像素精度坐标系:像素中心
该坐标系的原点位于左上角图像像素的中心,坐标轴分别沿行(r)和列(c)方向。这样的设定包含了像素坐标系。图像的左上角坐标为(-0.5, -0.5) ,对于大小为高度×宽度 = m×n像素的图像,右下角坐标为(m - 0.5, n - 0.5)(=(m - 1 + 0.5, n - 1 + 0.5) ,记住坐标值从0开始)。这也意味着像素(k, l)覆盖的矩形区域为(k - 0.5, l - 0.5)、(k + 0.5, l - 0.5)、(k - 0.5, l + 0.5)、(k + 0.5, l + 0.5) 。这种设定被称为标准坐标系,也叫图像坐标系。
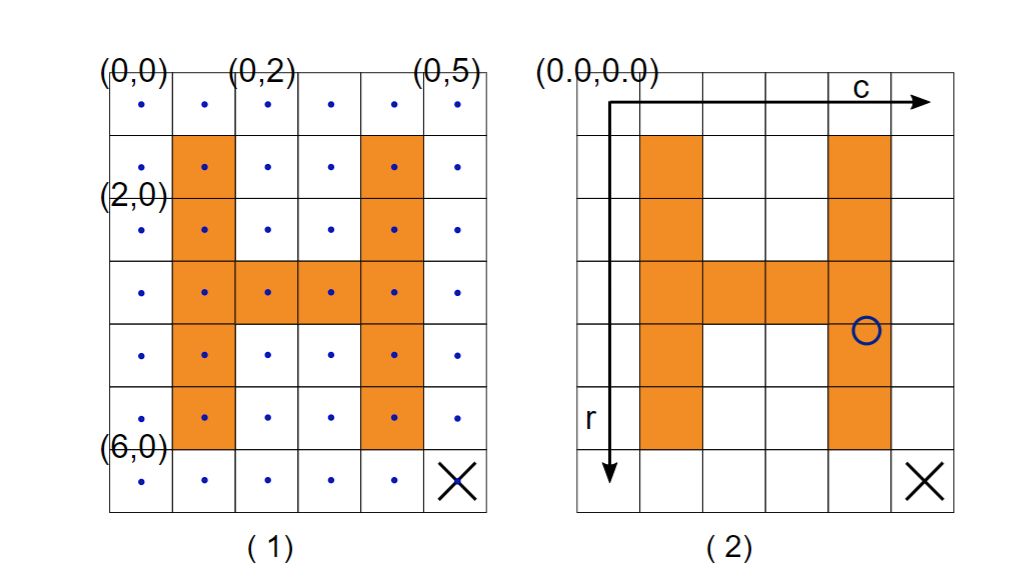
上图为HALCON 标准像素和亚像素笛卡尔坐标系示意图。叉号表示图像右下角的像素。其中心坐标为 (6, 5)(在像素坐标系 (1) 中),(6.0, 5.0)(在标准亚像素坐标系 (2) 中)。圆心坐标为 (3.6, 4.1)。
HALCON非标准笛卡尔坐标系
如果我们将图像绕其原点旋转π/2(即90度),我们希望两幅图像边缘相接但不重叠。此外,对图像进行缩放时,不希望出现负的图像坐标。为此,原点(0,0)必须设置在图像的一个角上。这就引出了以下坐标系。
亚像素精度坐标系:边缘中心
在这个坐标系中,我们将原点设置在图像的左上角。因此,左上角像素的中心坐标为(0.5, 0.5) ,对于大小为高度×宽度 = m×n像素的图像,右下角坐标为(m, n) 。像素(k, l)覆盖的矩形区域为(k, l)、(k, l + 1)、(k + 1, l)、(k + 1, l + 1) 。
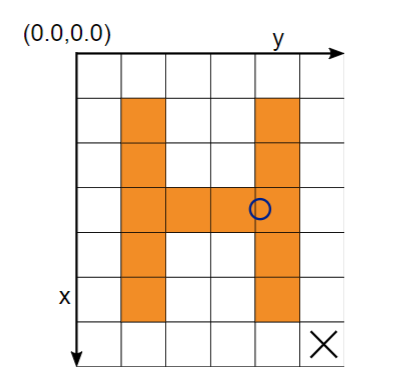
展示HALCON非标准亚像素笛卡尔坐标系,叉号表示图像右下角像素,其中心坐标为(6.5, 5.5),圆心坐标为(3.6, 4.1)
对于这个坐标系,旋转定义为数学上的正方向,即逆时针方向。π/2(90度)的旋转将第一轴(x轴)映射到第二轴(y轴)。相应地,轴的分配为行:x坐标,列:y坐标。

使用边缘中心坐标系对旋转(α)进行可视化。
期望输入参数处于任意笛卡尔坐标系的算子
算子 AffineTransPoint2d 将由 homMat2D 给出的变换应用于点坐标。这意味着,AffineTransPoint2d 在两种笛卡尔坐标系中都能起作用,只要确保点和变换处于相同的坐标系中即可。
算子 AngleLl 和 AngleLx 可以接受以像素中心坐标形式输入的点,但返回的角度遵循数学上正方向(即逆时针方向)的旋转约定,并且以水平轴为 0,就如同在边缘中心坐标系中那样。
期望输入参数处于不同坐标系的算子
在 HALCON 中,也存在这样的情况:一个算子期望其输入处于不同的坐标系。一方面,对象期望处于其常用的坐标系,即标准坐标系。另一方面,对于变换矩阵 homMat2D,算子期望输入的是边缘中心坐标系下的坐标,因为在上述变换方面边缘中心坐标系具有优势。该算子将对象的坐标从 HALCON 的标准坐标系(原点位于左上角像素的中心)转换为边缘中心坐标系(原点位于左上角像素的左上角)。在用 homMat2D 进行变换之后,结果会被转换回标准坐标系。
在 HALCON 中,某些操作符要求输入参数来自不同的坐标系系统。具体来说:
-
对象参数(如区域、轮廓等)默认使用 标准坐标系(Standard Coordinate System),原点位于左上角像素的中心,即
(0.5, 0.5)。 -
变换矩阵
homMat2D则需基于 边缘中心坐标系(Edge-centered Coordinate System)定义,原点位于左上角像素的左上角,即(0, 0)。
内部处理流程
-
输入转换:操作符自动将对象的坐标从标准坐标系转换为边缘中心坐标系。
-
例如,若对象的某个点坐标为
(x, y),转换时会执行x_edge = x - 0.5和y_edge = y - 0.5。
-
-
应用变换:在边缘中心坐标系下,使用
homMat2D对对象进行仿射变换。 -
输出转换:将变换后的坐标从边缘中心坐标系转回标准坐标系。
-
反向转换公式为
x_std = x_transformed + 0.5和y_std = y_transformed + 0.5。
-
典型操作符示例
-
AffineTransRegion(区域仿射变换)-
输入区域基于标准坐标系,变换矩阵基于边缘中心坐标系,输出区域仍为标准坐标系。
-
-
AffineTransContourXld(轮廓仿射变换)-
确保轮廓变换时几何精度不受像素插值影响。
-
技术意义
-
边缘中心坐标系的优势:
-
避免因像素中心对齐导致的亚像素误差,使平移、旋转等变换更精确。
-
简化连续变换的矩阵合成(如
hom_mat2d_compose)。
-
-
开发注意事项:
-
若手动定义
homMat2D,需确保其参数在边缘中心坐标系下计算。 -
使用
area_center或get_contour_xld获取对象坐标时,结果默认在标准坐标系中。
-
坐标系转换公式总结
| 操作方向 | 转换公式 |
|---|---|
| 标准 → 边缘中心 | x_edge = x_std - 0.5 |
y_edge = y_std - 0.5 |
|
| 边缘中心 → 标准 | x_std = x_edge + 0.5 |
y_std = y_edge + 0.5 |
常见问题
Q:为何不统一使用单一坐标系? A:标准坐标系符合直觉(像素中心为坐标点),而边缘中心坐标系更适合几何变换(避免半个像素偏移导致的累积误差)。两者分工明确,确保算法鲁棒性。
Q:如何验证变换矩阵的正确性? A:可通过 hom_mat2d_identity 生成单位矩阵,手动平移 (0.5, 0.5) 后观察对象是否精确移动一个像素。
支持的操作符列表
-
AffineTransContourXld -
AffineTransImage -
AffineTransImageSize -
AffineTransPixel -
AffineTransPolygonXld -
AffineTransRegion -
ProjectiveTransContourXld -
ProjectiveTransImage -
ProjectiveTransImageSize -
ProjectiveTransPixel -
ProjectiveTransRegion
矩阵坐标系转换示例
若需将像素中心坐标系的变换矩阵转换为边缘中心坐标系:
HomMat2dTranslate(HomMat2D, 0.5, 0.5, HomMat2DTmp)
HomMat2dTranslateLocal(HomMat2DTmp, -0.5, -0.5, HomMat2DAdapted) 注意,上述以projective_开头的算子使用的是投影变换矩阵。这些变换矩阵,例如,可以从 3D 相机位姿中获取。这样做时,所使用的矩阵是 3D 坐标系中 xy 平面的投影。相应地,轴的分配为行:y 坐标,列:x 坐标,因此坐标需要进行转换。
基于形状的匹配和基于相关性的匹配
基于形状匹配(如FindGenericShapeModel )的结果以边缘居中坐标系给出。返回的匹配结果已经过变换。相应的单应变换矩阵可使用 GetGenericShapeModelResult 检索。
基于相关性匹配(如FindNccModel和FindNccModels )的结果同样在边缘居中坐标系中计算,不过变换参数会单独返回。利用这些结果,可以创建一个变换矩阵homMat2D,该矩阵可直接应用于如AffineTransContourXld 以及上述“适用于不同坐标系参数的算子”段落中列出的其他算子。
为显示基于相关性匹配找到的结果,我们强烈建议使用dev_display_ncc_matching_results 过程。
在以下图像中,我们给出一个示例,展示在正确和错误的坐标系中使用变换矩阵时,显示的匹配结果可能是什么样的。对于后者(如图(3)所示),变换矩阵也是在像素居中坐标系中给出的,因此AffineTransContourXld 显示的匹配结果会有0.5像素的偏差。注意,这种影响仅在涉及旋转时可见。
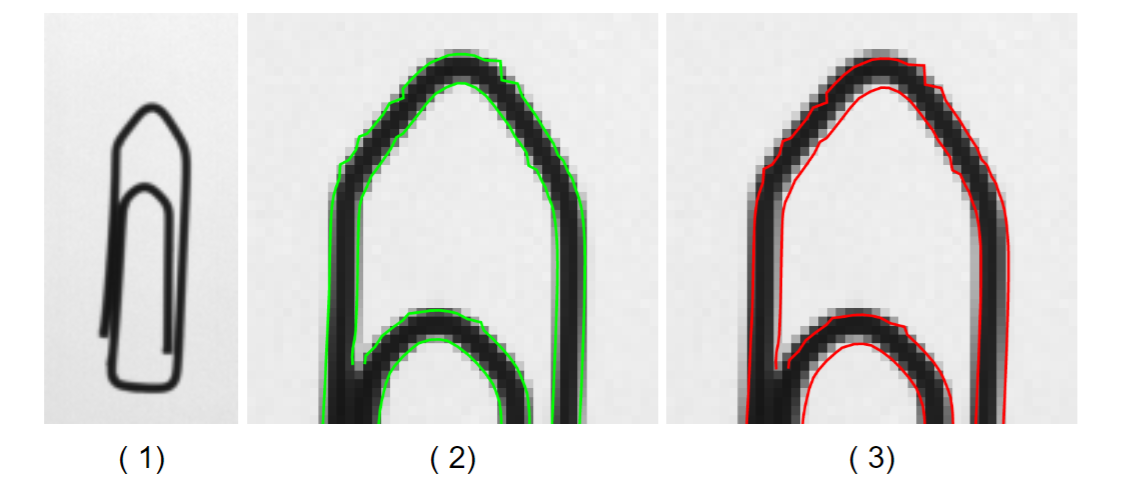
回形针的原始图像(1),输入坐标正确时匹配的一部分(2),以及输入坐标错误时的匹配情况。
非笛卡尔坐标系
亚像素精确坐标系:极坐标
在极坐标系中,点通过距离和角度来定义。该距离称为径向坐标,是相对于固定点(极点)给出的。角坐标是相对于已定义的轴(极轴)给出的。在HALCON中,极点由(Row, Column)指定,极轴为水平轴。角坐标以弧度表示。
通过PolarTransImageExt进行变换后,输出图像中的左上角像素始终对应于输入图像中由radiusStart和angleStart指定的点。类似地,输出图像中的右下角像素对应于输入图像中由radiusEnd和angleEnd指定的点。在通常模式下(angleStart < angleEnd 且 radiusStart < radiusEnd ),极坐标变换按数学正方向(逆时针方向)进行。此外,半径较小的点位于输出图像的上部。通过适当地交换这些参数的值(例如,angleStart > angleEnd 或 radiusStart > radiusEnd ),可以实现输出图像的任何所需方向。
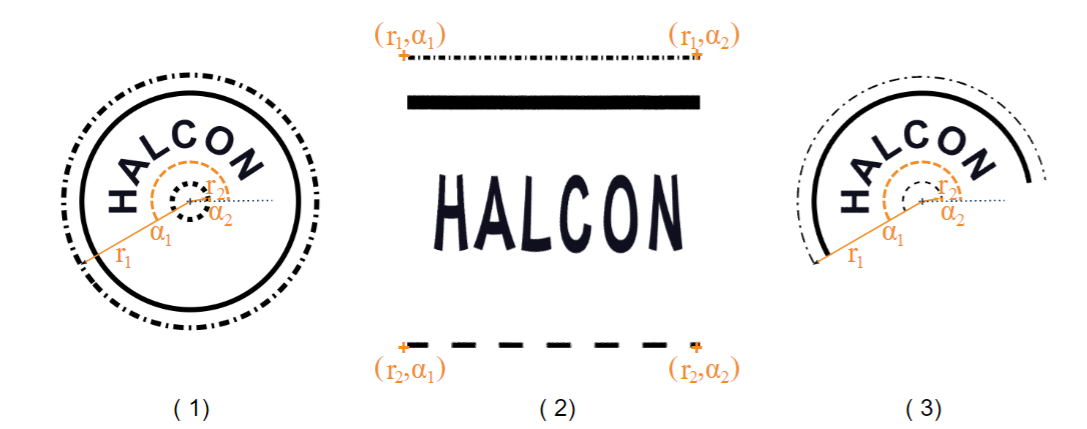
例如,我们展示一个由其极点(行, 列)(+)、极轴(...)、两个角坐标angleStart(α1)、angleEnd(α2)以及两个径向坐标radiusStart(r1)、radiusEnd(r2)定义的环形弧。(1) 原始图像以及定义环形弧的参数。(2) 环形弧,在一个图中显示,其中极坐标形成通过PolarTransImageExt获得的等距网格。(3) 在原始图像表示中的环形弧。笛卡尔坐标通过对图像(2)应用PolarTransImageInv获得。原点位于左上角像素的中心。
极坐标操作符
-
PolarTransImageExt -
PolarTransImageInv -
PolarTransRegion -
PolarTransRegionInv -
PolarTransContourXld -
PolarTransContourXldInv -
PolarTransImage(旧版)
图像、区域与模型的坐标系继承
| 类型 | 坐标系继承规则 |
|---|---|
| 图像(含裁剪域) | 继承原始图像的坐标系(原点与坐标值不变)。 |
| 区域(Region) | 同上。 |
| 模型 | 可能具有局部坐标系(如 CreateGenericShapeModel 创建的模型以ROI重心为原点)。 |
标定坐标系
-
目的:将像素坐标转换为真实世界坐标(需相机标定)。
-
应用场景:三维视觉(3D Vision)、测量等。
-
参考文档:
-
《Solution Guide III-C - 3D Vision》(标定与三维重建方法)。
-
《Solution Guide II-B - Matching》(模型局部坐标系详解)。
-
技术注释
-
边缘中心坐标系的优势:消除像素对齐误差,确保几何变换(如连续旋转)的数学一致性。
-
开发建议:
-
使用
set_system('coord_system', 'edge')临时切换坐标系。 -
处理标定坐标时,优先使用
image_points_to_world_plane等接口转换坐标。
-
算子列表
-
AffineTransPixel:对像素坐标应用任意二维仿射变换。 -
AffineTransPoint2d:对点应用任意二维仿射变换。 -
DeserializeHomMat2d:反序列化一个序列化的齐次二维变换矩阵。 -
HomMat2dCompose:将两个齐次二维变换矩阵相乘。 -
HomMat2dDeterminant:计算齐次二维变换矩阵的行列式。 -
HomMat2dIdentity:生成表示恒等二维变换的齐次变换矩阵。 -
HomMat2dInvert:求齐次二维变换矩阵的逆。 -
HomMat2dReflect:向齐次二维变换矩阵添加反射变换。 -
HomMat2dReflectLocal:向齐次二维变换矩阵添加局部反射变换。 -
HomMat2dRotate:向齐次二维变换矩阵添加旋转变换。 -
HomMat2dRotateLocal:向齐次二维变换矩阵添加局部旋转变换。 -
HomMat2dScale:向齐次二维变换矩阵添加缩放变换。 -
HomMat2dScaleLocal:向齐次二维变换矩阵添加局部缩放变换。 -
HomMat2dSlant:向齐次二维变换矩阵添加倾斜变换。 -
HomMat2dSlantLocal:向齐次二维变换矩阵添加局部倾斜变换。 -
HomMat2dToAffinePar:从齐次二维变换矩阵计算仿射变换参数。 -
HomMat2dTranslate:向齐次二维变换矩阵添加平移变换。 -
HomMat2dTranslateLocal:向齐次二维变换矩阵添加局部平移变换。 -
HomMat2dTranspose:转置齐次二维变换矩阵。 -
HomMat3dProject:将仿射三维变换矩阵投影为二维投影变换矩阵。 -
HomVectorToProjHomMat2d:使用给定的点对应关系计算齐次变换矩阵。 -
PointLineToHomMat2d:根据点到线的对应关系近似仿射变换。 -
ProjectiveTransPixel:使用齐次投影变换矩阵投影像素坐标。 -
ProjectiveTransPoint2d:使用投影变换矩阵投影齐次二维点。 -
SerializeHomMat2d:序列化齐次二维变换矩阵。 -
VectorAngleToRigid:根据点和角度计算刚性仿射变换。 -
VectorFieldToHomMat2d:根据位移矢量场近似仿射映射。 -
VectorToAniso:根据点对应关系近似各向异性相似变换。 -
VectorToHomMat2d:根据点对应关系近似仿射变换。 -
VectorToProjHomMat2d:使用给定的点对应关系计算投影变换矩阵。 -
VectorToProjHomMat2dDistortion:使用给定的图像点对应关系计算投影变换矩阵和径向畸变系数。 -
VectorToRigid:根据点对应关系近似刚性仿射变换。 -
VectorToSimilarity

 浙公网安备 33010602011771号
浙公网安备 33010602011771号