连杆结构上的欧拉-牛顿法迭代动力学算法
以下每个量都是在各自坐标系内观察得到的值,同时小括号表示取某个方向上的分量作为一个新的向量。
外推
从基座开始,对每个连杆使用牛顿-欧拉方差,逐个计算连杆的速度和加速度。
\(w_{i+1}=Rw_i+\dot{\theta}_{i+1}(z)\)
\(\dot{w}_{i+1}=R\dot{w}_i+Rw_i \times \dot{\theta_i}(z) + \ddot{\theta}_{i+1}(z)\)
\(\dot{v}_{i+1}=R(\dot{w_i} \times P_{i+1} + w_i \times (w_i \times P_{i+1}) + \dot{v}_i)\)
\(\dot{v}_{C_{i+1}}=\dot{w_{i+1}} \times P_{C_{i+1}} + w_{i+1} \times (w_{i+1} + P_{C_{i+1}}) + \dot{v}_{i+1}\)
\(F_{i+1}=m_{i+1}\dot{v}_{C_{i+1}}\)
\(N_{i+1}=I_{C_{i+1}}\dot{w}_{i+1}+w_{i+1} \times I_{C_{i+1}} w_{i+1}\)
内推
从连杆n开始,利用外推过程中得到的惯性力,计算各个连杆上的力和力矩、关节驱动力
\(f_i = Rf_{i+1} + F_i\)
\(n_i = N_i + Rn_{i+1} + P_{C_i} \times F_i + P_{i+1} \times Rf_{i+1}\)
\(\tau_{i} = n_i^{T_i}(z)\)
初值
通常来说,底座是不动的,所以
\(w_0 = 0\), \(\dot{w}_0 = 0\)
\(v_0 = 0\)
而重力也是不能忽略的,那就令\(\dot{v}_0 = g\)即可,等效于机器人正在以1g的加速度在做向上加速运动。一般而言,写成向量是\(\dot{v}_0=g(y)\)。
末端执行器上可能有存在力和力矩,有
\(f_{n+1} = f_{final}\), \(n_{i+1} = n_{final}\)
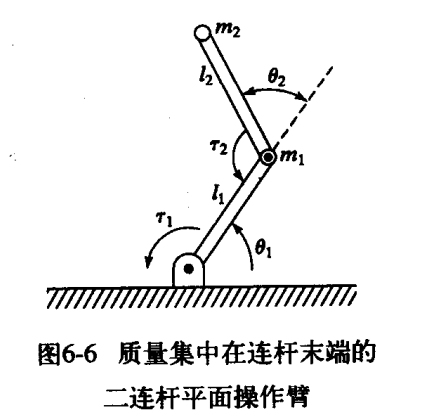
栗子-二连杆

 浙公网安备 33010602011771号
浙公网安备 33010602011771号