
D2L 学习笔记
 https://zh-v2.d2l.ai/
《动手学深度学习》第二版
能运行、可讨论的深度学习教科书
初学者学习理论的教程
https://zh-v2.d2l.ai/
《动手学深度学习》第二版
能运行、可讨论的深度学习教科书
初学者学习理论的教程
基础操作
张量 tensor
-
创建行向量:
x = torch.arange(12) -
改变张量形状:
x.reshape(3, 4)- 如果知晓目标维长度,剩余维长度可用
-1代替,而不必手动计算,如x.reshape(-1, 4)或x.reshape(3, -1)
- 如果知晓目标维长度,剩余维长度可用
-
访问张量各轴长度:
x.shape -
访问张量元素总数:
x.numel()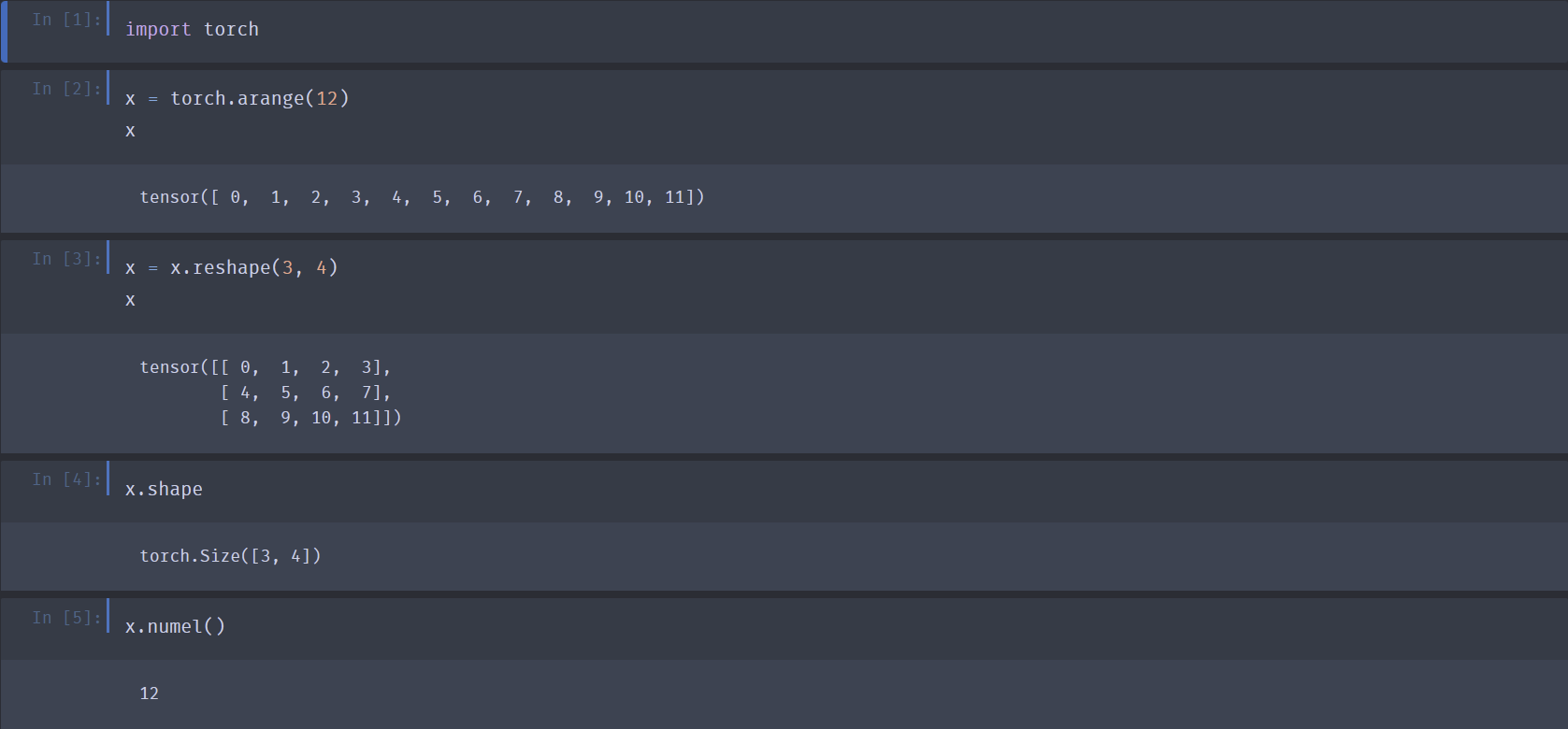
-
生成元素均为 0 的张量:
x = torch.zeros(3, 4). 注:python默认用浮点型(float32),如果想要指定形式可以利用dtype:x = torch.zeros(3, 4, dtype=torch.int32) -
生成元素均为 1 的张量:
x = torch.ones(3, 4). 注:python默认用浮点型(float32),如果想要指定形式可以利用dtype:x = torch.ones(3, 4, dtype=torch.int32) -
生成元素从 \(\mu = 0, \delta = 1\) 正态分布随机采样的张量:
x = torch.randn(3, 4) -
张量赋值:
x = torch.tensor([[1, 2, 3, 4], [5, 6, 7, 8], [9, 10, 11, 12]]) -
改变张量中某一个元素的值:
x[0, 1] = 1。 注意:直接x[0, 1]的返回结果是一个二维各轴长均为1的张量,提取元素时应带上.item()!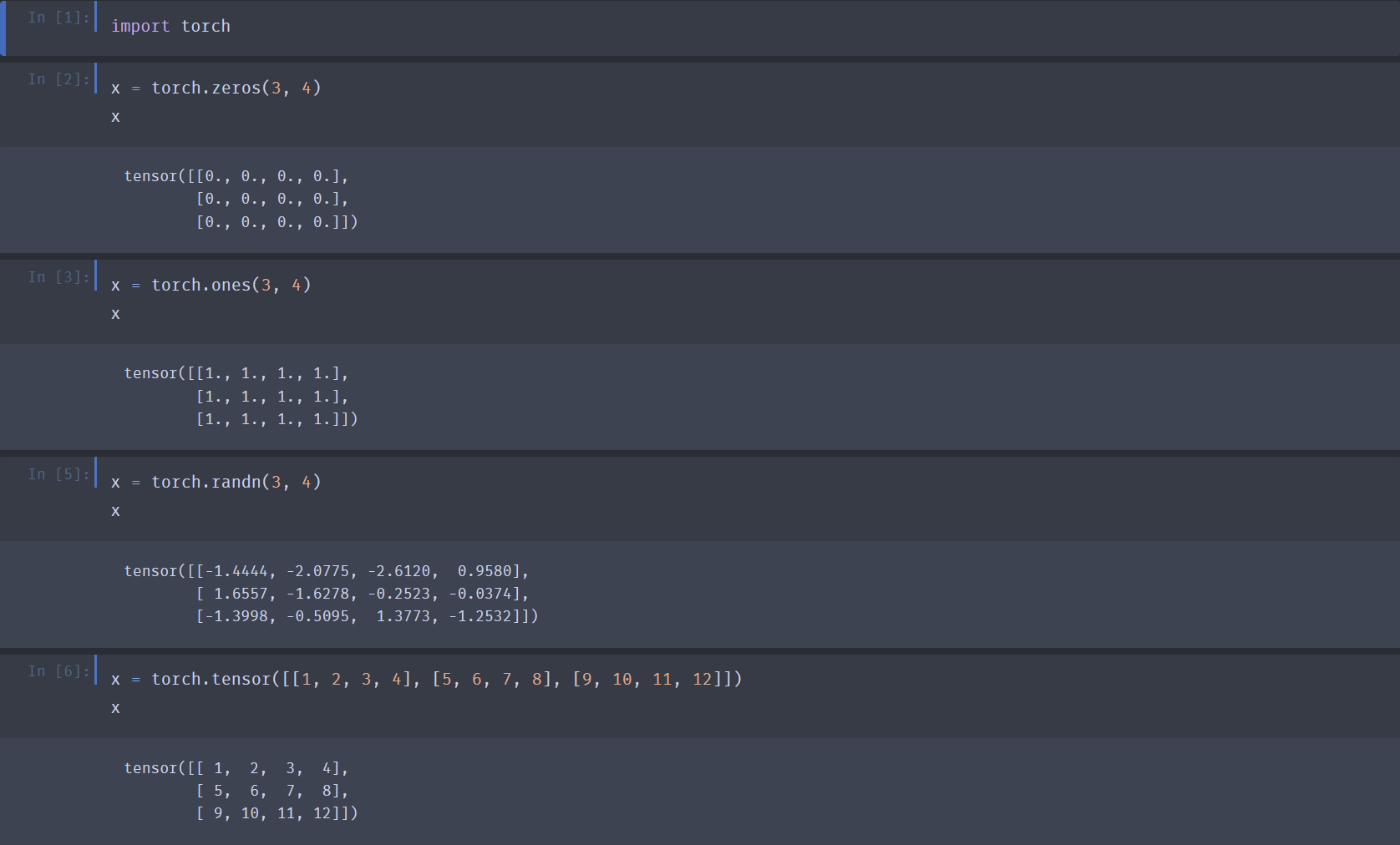
-
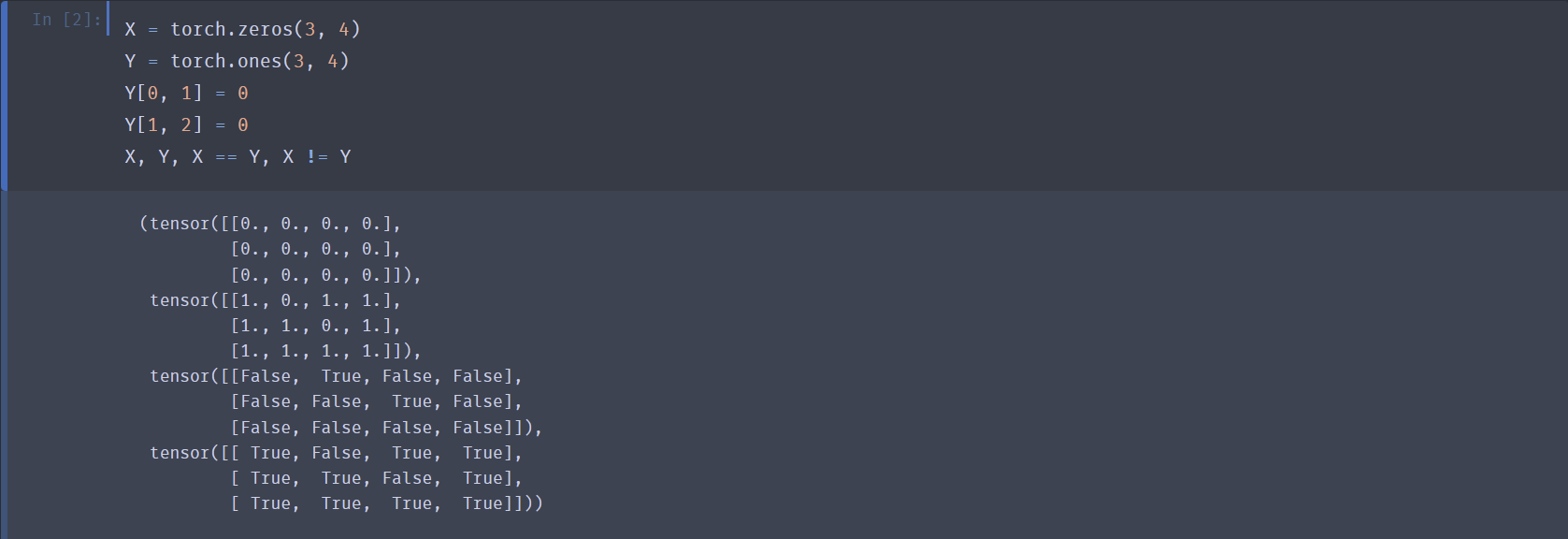
相同形状张量按元素加、减、乘、除、乘方:
x + y,x - y,x * y,x / y,x ** y
-
判断两个相同形状张量每个位置上对应元素相同、不同:
x == y,x != y- 注意返回值是一个True/False张量。
-
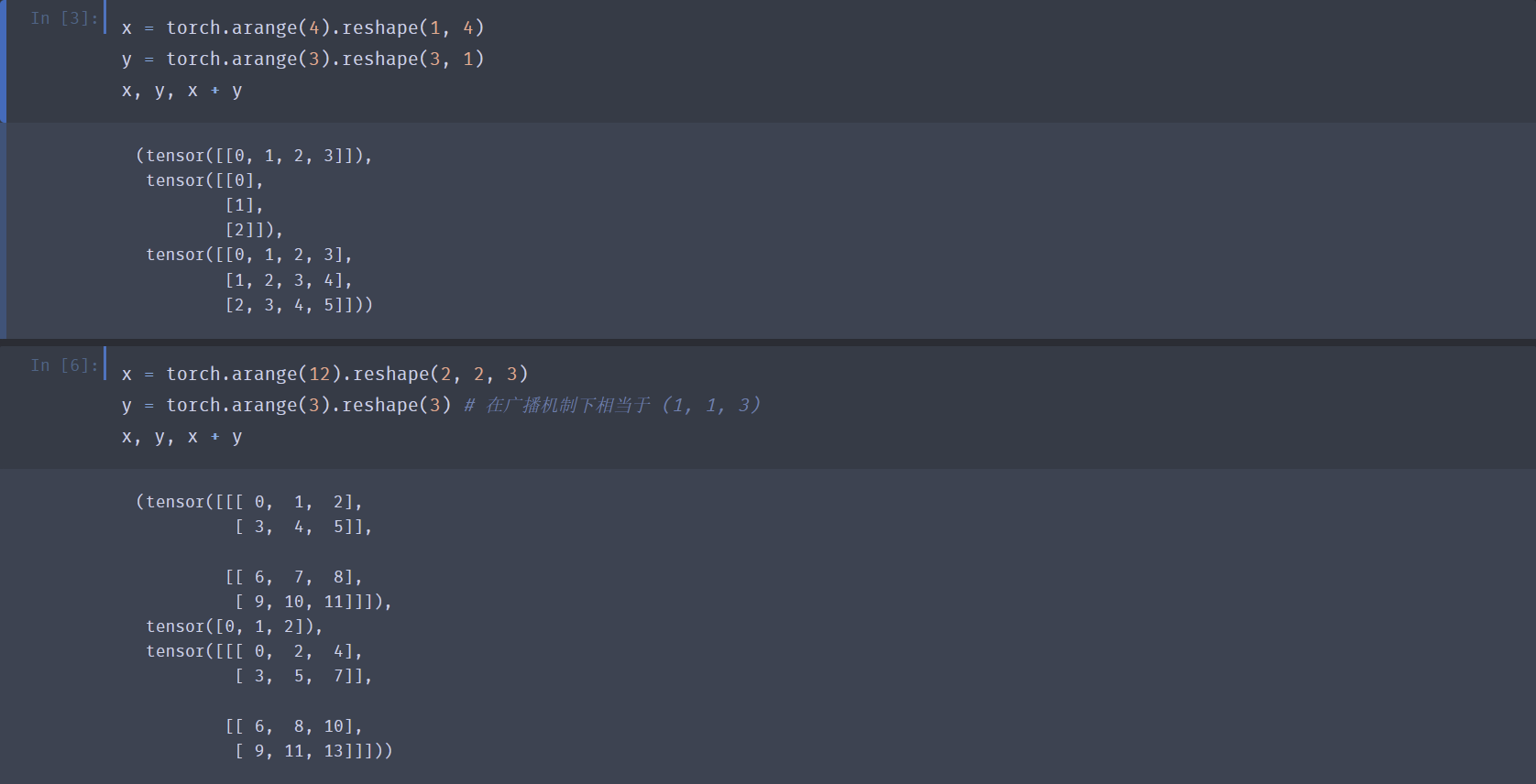
广播机制:不同形状张量进行逐元素运算(
+,-,*,/,**,==,!=etc.)时,会执行广播机制,通过沿长度为 \(1\) 的轴复制元素,使两个张量形状变得相同,再执行一般的逐元素运算。具体的:- 若两张量维数不同,则会在维数更小的张量左侧补“1”.
- 之后逐维比较:
- 若该维两张量长度相同 => 无需广播
- 若某一张量该维长度为 \(1\) => 将该张量沿此轴广播
- 否则,两张量无法进行逐元素运算,报错
- 广播后的两张量形状一致,按一般的逐元素运算法则进行计算。
-
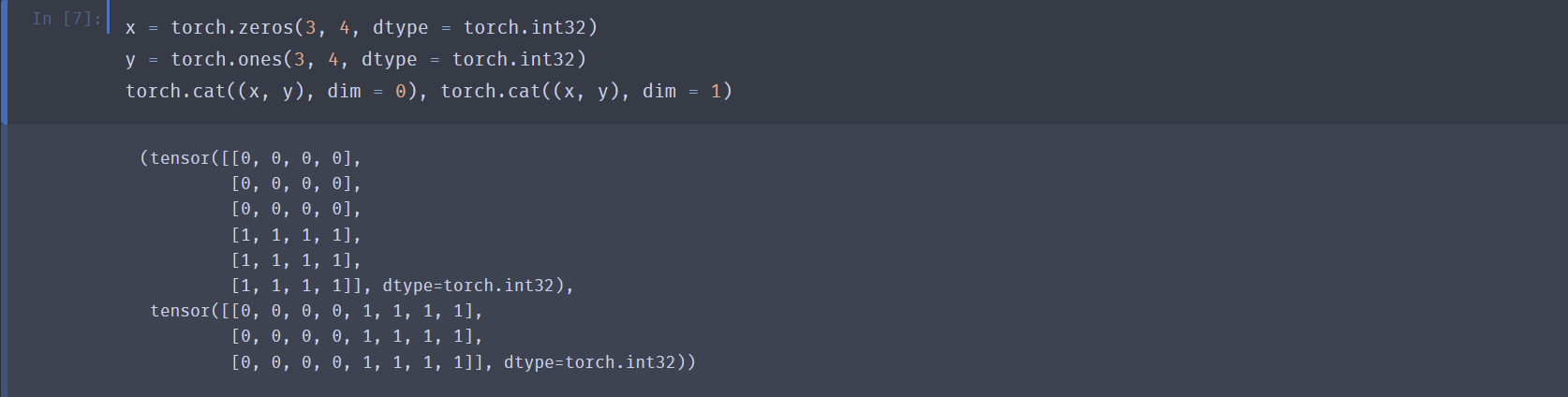
张量连接:
torch.cat((x, y), dim = 0)- 维数(dim)从 0 计起,和
reshape的顺序是相同的。从中括号嵌套的角度讲,最外层中括号是第 \(0\) 维,向内一层是第 \(1\) 维,以此类推,而包裹用逗号分隔的连续数字的那一维就是第 \(n-1\) 维。 - 按某一维连接时,该维大小可以不同,但剩余维的大小必须相同。
- 连接不改变张量的维数。
- 维数(dim)从 0 计起,和
-
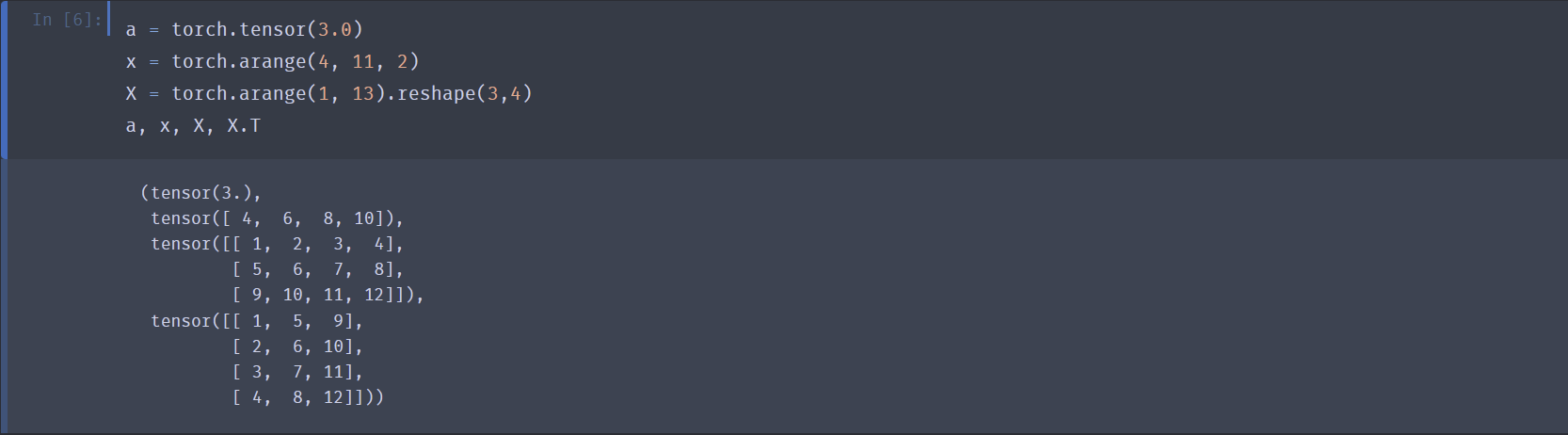
标量、向量、矩阵分别可以用0维、1维、2维张量表示。
- 在 Pytorch 中,向量并没有“列”与“行”的概念。
- 矩阵的转置:
X.T(注意:仅可对二维张量使用该操作,对于其它维张量使用该操作是非法的,但是仅有Warning而没有Error).
-
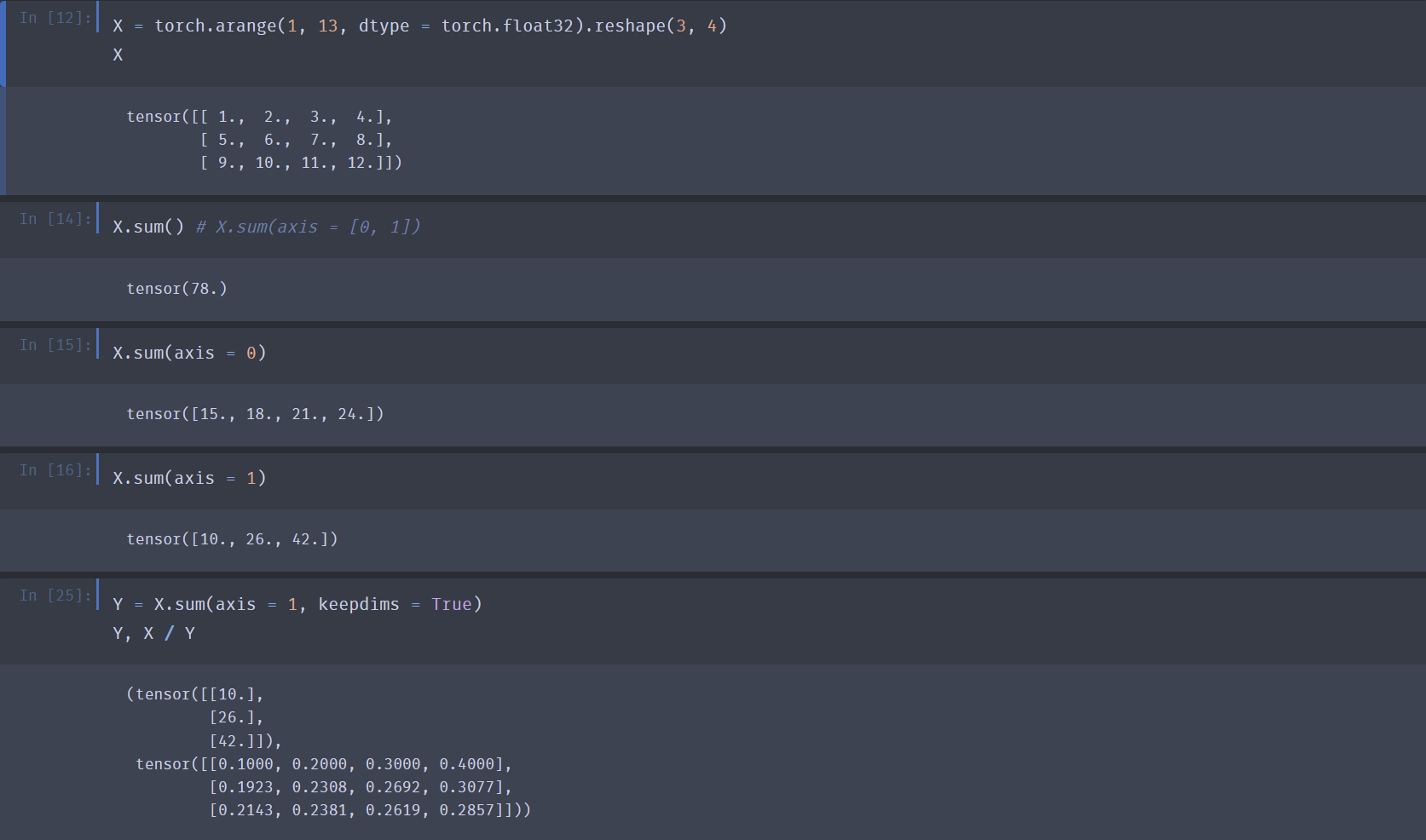
求和:
X.sum()- 求和是一种常见的降维操作。
- 默认情况下,求和会沿所有轴降维,即计算张量所有元素的和,使其变为一个标量。
- 可以通过
axis指定沿哪个/些轴降维求和。 - 可以通过设置
keepdims的值实现非降维求和,之后可以利用广播机制得到与原张量相同形状的张量。
-
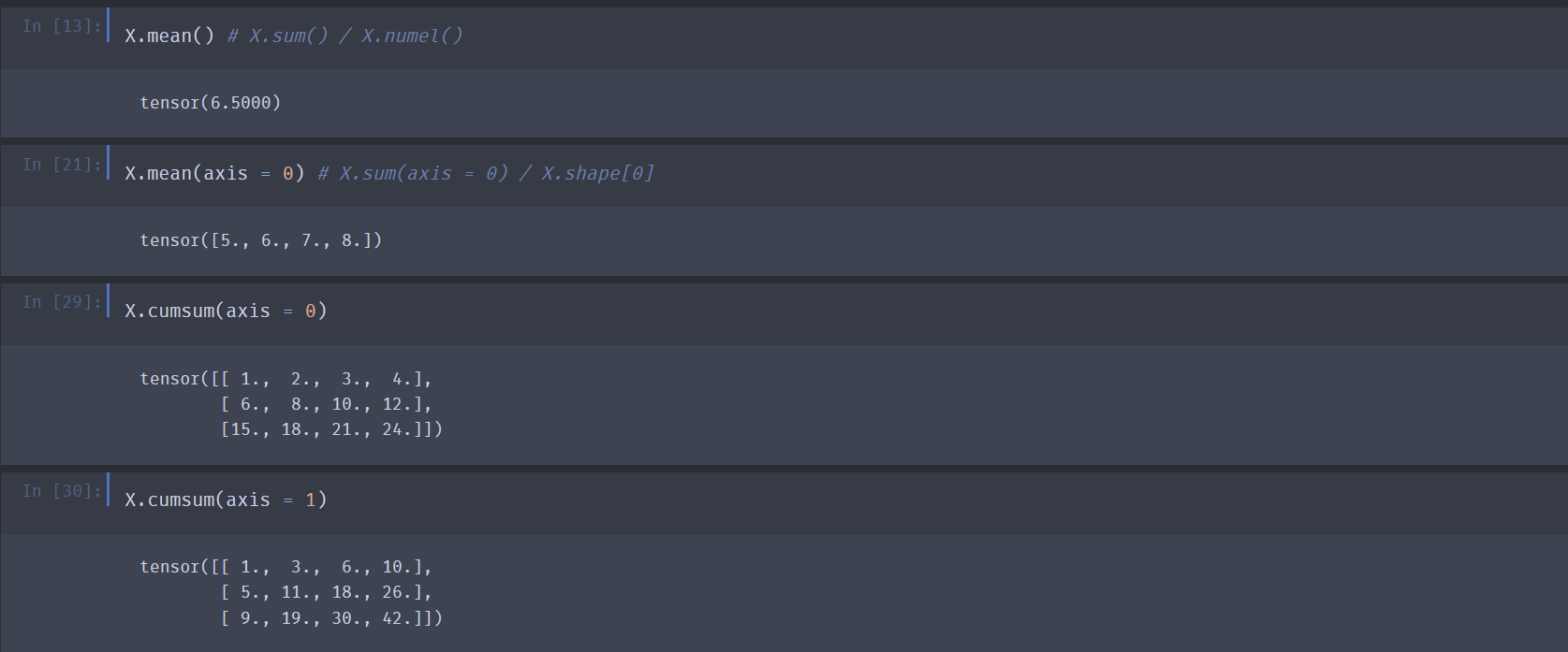
求平均值:
X.mean()- 求平均值是一种常见的降维操作。
- 默认情况下,求平均值会沿所有轴降维。
- 可以通过
axis指定沿哪个/些轴降维求平均值。 - 求均值操作只可以作用于浮点型或复数型的数据,整型不可以。
-
求沿某一方向前缀累加和:
X.cumsum(axis = 0)cumsum是一种不降维操作。
-
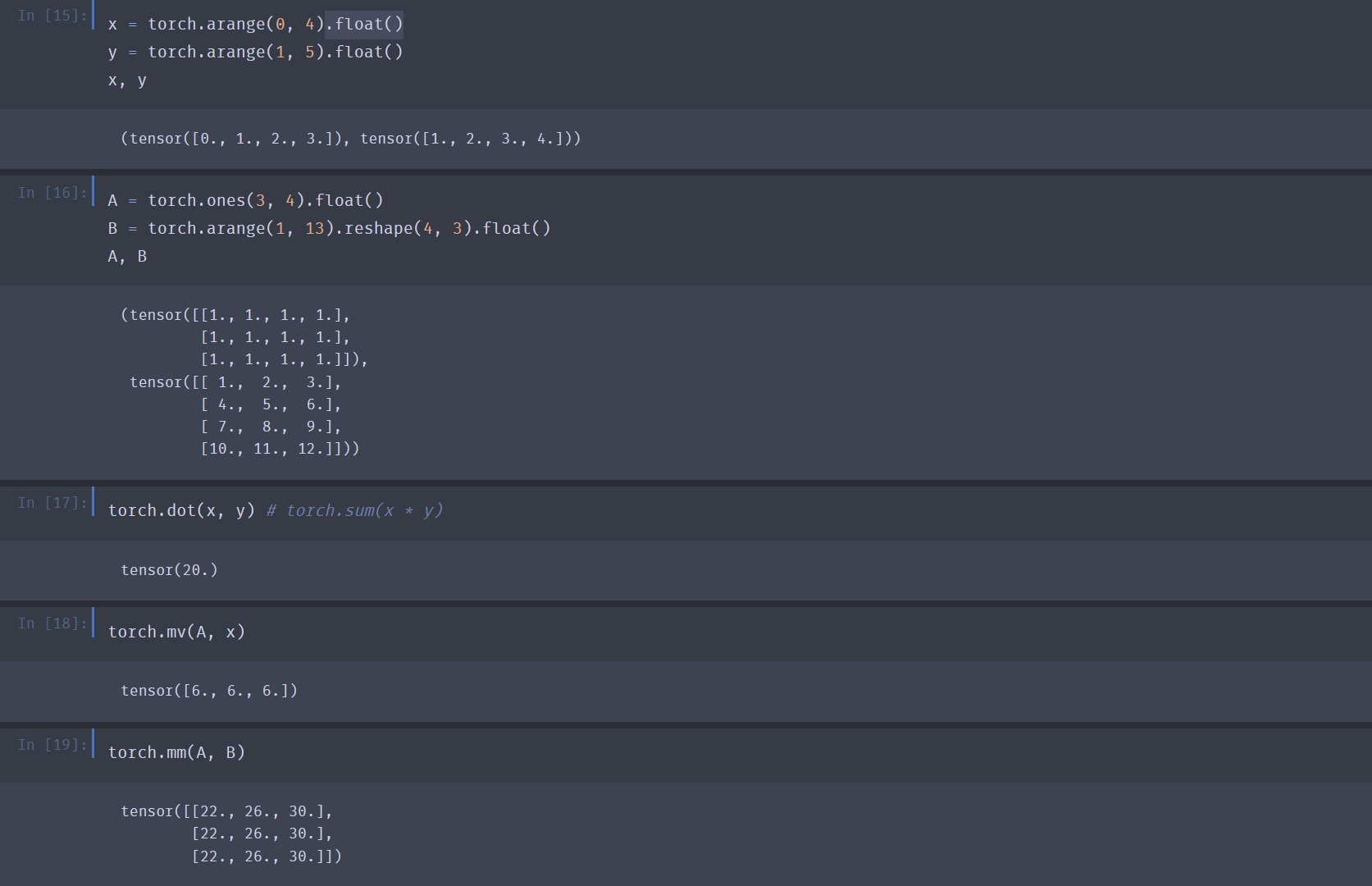
向量点乘:
torch.dot(x, y) -
矩阵向量乘:
torch.mv(A, x) -
矩阵矩阵乘:
torch.mm(A, B)mv()和mm()均要求参与运算的张量的元素类型为浮点型,整型不可以。
-
范数
\(L_p\) 范数的定义为: \(\lVert x \rVert_{p} = (\sum\limits_{i=1}^{n} |x_i|^p )^{\frac{1}{p}}\).
常用范数分别是 \(L_1\)范数 \(\lVert x \rVert_{1} = \sum\limits_{i=1}^{n} |x_i|\) ,和 \(L_2\)范数 \(\lVert x \rVert_{2} = \sqrt{\sum\limits_{i=1}^{n} {x_i}^2 }\) :
- \(L_1\) 范数:
torch.abs(x).sum() - \(L_2\) 范数:
torch.norm(x)

- \(L_1\) 范数:
绘图 matplotlib
%matplotlib inline # 让 matplotlib 绘出的图直接嵌在 jpt notebook 的输出单元格中,而非独立窗口。
from matplotlib_inline import backend_inline # backend_inline 模块提供对当前所用绘图后端(这里是与 Jupyter 集成的 inline 后端)的细粒度控制。
from mxnet import np, npx # 从 MXNet 深度学习框架里导入 np:MXNet 的 NumPy 兼容张量接口;npx:MXNet 的扩展算子接口。
from d2l import mxnet as d2l # 导入《动手学深度学习》提供的 MXNet 版工具包 d2l。
npx.set_np() # 激活 MXNet 的 NumPy 兼容模式。只有调用这句后,mxnet.numpy 中的算子才能像原生 NumPy 那样自动执行延迟计算与自动微分。
def f(x):
return 3 * x ** 2 - 4 * x
def numerical_lim(f, x, h): # 传入函数 f、点 x、步长 h,返回该点的近似导数值。
return (f(x + h) - f(x)) / h
def use_svg_display(): #@save
backend_inline.set_matplotlib_formats('svg') # 强制 inline 后端以 SVG 矢量格式 输出图形。矢量图在放大时不会失真,适合教材 / 论文场景。
def set_figsize(figsize=(3.5, 2.5)): #@save
use_svg_display()
d2l.plt.rcParams['figure.figsize'] = figsize # 设置默认画布尺寸(宽 3.5 英寸、高 2.5 英寸),并且先调用 use_svg_display 保证 SVG 输出。
#@save
def set_axes(axes, xlabel, ylabel, xlim, ylim, xscale, yscale, legend):
# 对给定 Axes 对象一次性完成坐标轴常用设置:
axes.set_xlabel(xlabel) # xlabel / ylabel:坐标轴标题
axes.set_ylabel(ylabel)
axes.set_xscale(xscale) # xscale / yscale:坐标刻度类型(线性/对数)
axes.set_yscale(yscale)
axes.set_xlim(xlim) # xlim / ylim:坐标范围
axes.set_ylim(ylim)
if legend:
axes.legend(legend) # legend:图例
axes.grid() # grid:打开网格线
#@save
def plot(X, Y=None, xlabel=None, ylabel=None, legend=None, xlim=None,
ylim=None, xscale='linear', yscale='linear',
fmts=('-', 'm--', 'g-.', 'r:'), figsize=(3.5, 2.5), axes=None):
# plot 是封装的绘制函数
# 若只给 X(或 Y 是一维),自动把它当成 Y,内部补空 X。
# 支持多条曲线(X、Y 为列表),每条曲线自动循环使用 fmts 中的格式字符串。
# 自动调用前面定义的 set_figsize、set_axes,简化调用者代码。
if legend is None:
legend = []
set_figsize(figsize)
axes = axes if axes else d2l.plt.gca()
# 如果X有一个轴,输出True
def has_one_axis(X):
return (hasattr(X, "ndim") and X.ndim == 1 or isinstance(X, list)
and not hasattr(X[0], "__len__"))
if has_one_axis(X):
X = [X]
if Y is None:
X, Y = [[]] * len(X), X
elif has_one_axis(Y):
Y = [Y]
if len(X) != len(Y):
X = X * len(Y)
axes.cla()
for x, y, fmt in zip(X, Y, fmts):
if len(x):
axes.plot(x, y, fmt)
else:
axes.plot(y, fmt)
set_axes(axes, xlabel, ylabel, xlim, ylim, xscale, yscale, legend)
x = np.arange(0, 3, 0.1) # 在 [0,3) 区间以 0.1 为步长生成一维张量,供给后续作图和计算。
plot(x, [f(x), 2 * x - 3], 'x', 'f(x)', legend=['f(x)', 'Tangent line (x=1)']) # 调用上面封装的 plot 函数:
# x 作为横坐标;两条纵坐标曲线:f(x) = 3x²−4x 本身 和 直线 2x−3(切线);x 轴标签 'x',y 轴标签 'f(x)',图例区分两条线;添加图例:两条曲线分别对应的文字。

自动微分 automatic differentiation
数学定义:(以下 \(\mathbf{x}\) 和 \(\mathbf{y}\) 均为列向量)
- 标量对标量的微分:\(\dfrac{\partial y}{\partial x}\)
- 标量对向量的微分:\(\dfrac{\partial y}{\partial \mathbf{x}} = \begin{bmatrix} \dfrac{\partial y}{\partial x_1}, \dfrac{\partial y}{\partial x_2}, \cdots , \dfrac{\partial y}{\partial x_n} \end{bmatrix}\)
- 向量对标量的微分:\(\dfrac{\partial \mathbf{y}}{\partial x} = \begin{bmatrix} \dfrac{\partial y_1}{\partial x} \\\ \dfrac{\partial y_2}{\partial x} \\\ \cdots \\\ \dfrac{\partial y_m}{\partial x} \end{bmatrix}\)
- 向量对向量的微分:\(\dfrac{\partial \mathbf{y}}{\partial \mathbf{x}} = \begin{bmatrix} \dfrac{\partial y_1}{\partial \mathbf{x}} \\\ \dfrac{\partial y_2}{\partial \mathbf{x}} \\\ \cdots \\\ \dfrac{\partial y_m}{\partial \mathbf{x}} \end{bmatrix} = \begin{bmatrix} \dfrac{\partial y_1}{\partial x_1}, \dfrac{\partial y_1}{\partial x_2}, \cdots , \dfrac{\partial y_1}{\partial x_n} \\\ \dfrac{\partial y_2}{\partial x_1}, \dfrac{\partial y_2}{\partial x_2}, \cdots , \dfrac{\partial y_2}{\partial x_n} \\\ \vdots \\\ \dfrac{\partial y_m}{\partial x_1}, \dfrac{\partial y_m}{\partial x_2}, \cdots , \dfrac{\partial y_m}{\partial x_n} \end{bmatrix}\)
链式法则: \(\dfrac{\partial y}{\partial x} = \dfrac{\partial y}{\partial u_n} \dfrac{\partial u_n}{\partial u_{n-1}} \cdots \dfrac{\partial u_2}{\partial u_1} \dfrac{\partial u_1}{\partial x}\)
- 正向累积: \(\dfrac{\partial y}{\partial x} = \dfrac{\partial y}{\partial u_n} ( \dfrac{\partial u_n}{\partial u_{n-1}} ( \cdots (\dfrac{\partial u_2}{\partial u_1} \dfrac{\partial u_1}{\partial x}) ) )\)
- 反向传播 (backpropagation): \(\dfrac{\partial y}{\partial x} = ( ( ( \dfrac{\partial y}{\partial u_n} \dfrac{\partial u_n}{\partial u_{n-1}} ) \cdots ) \dfrac{\partial u_2}{\partial u_1} )\dfrac{\partial u_1}{\partial x}\)
操作:
-
设定张量记录计算图开关:
x.requires_grad_(True)- Pytorch 会对
requires_grad == True的张量自动隐式构建计算图。每执行一步张量操作,立即把对应节点插进计算图。给中间结果挂上 grad_fn=<...>,记下反向传播时要用到的“倒带函数”。当最后调用反向传播函数时,再沿着这张隐式建好的图反向走一遍,算出所有叶子张量的梯度。
- Pytorch 会对
-
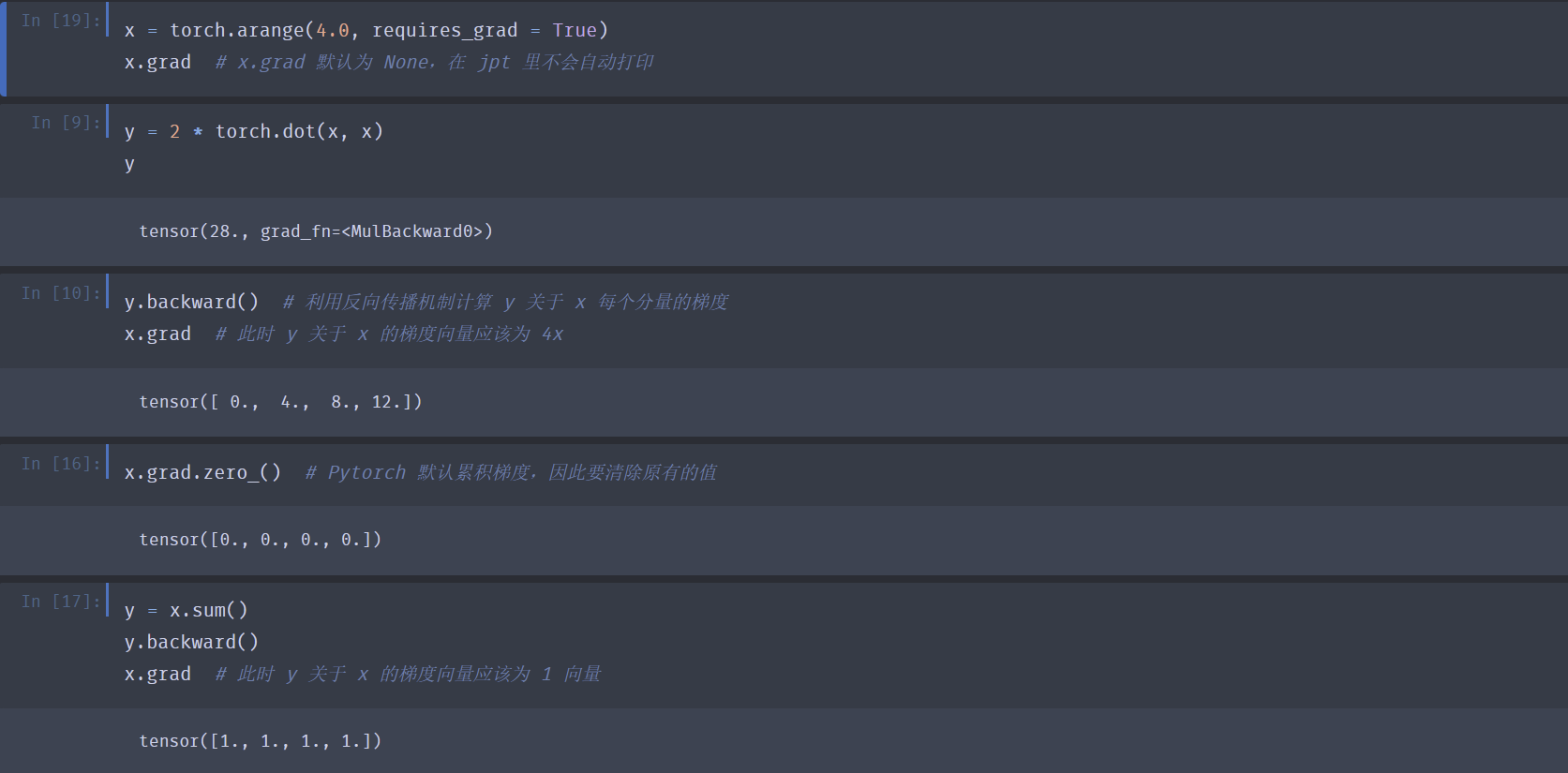
张量的梯度:
x.grad- 默认是 None.
- 叶子节点的梯度默认会累积,因此如果计算不同函数对同一向量的梯度的时候要记得清零。
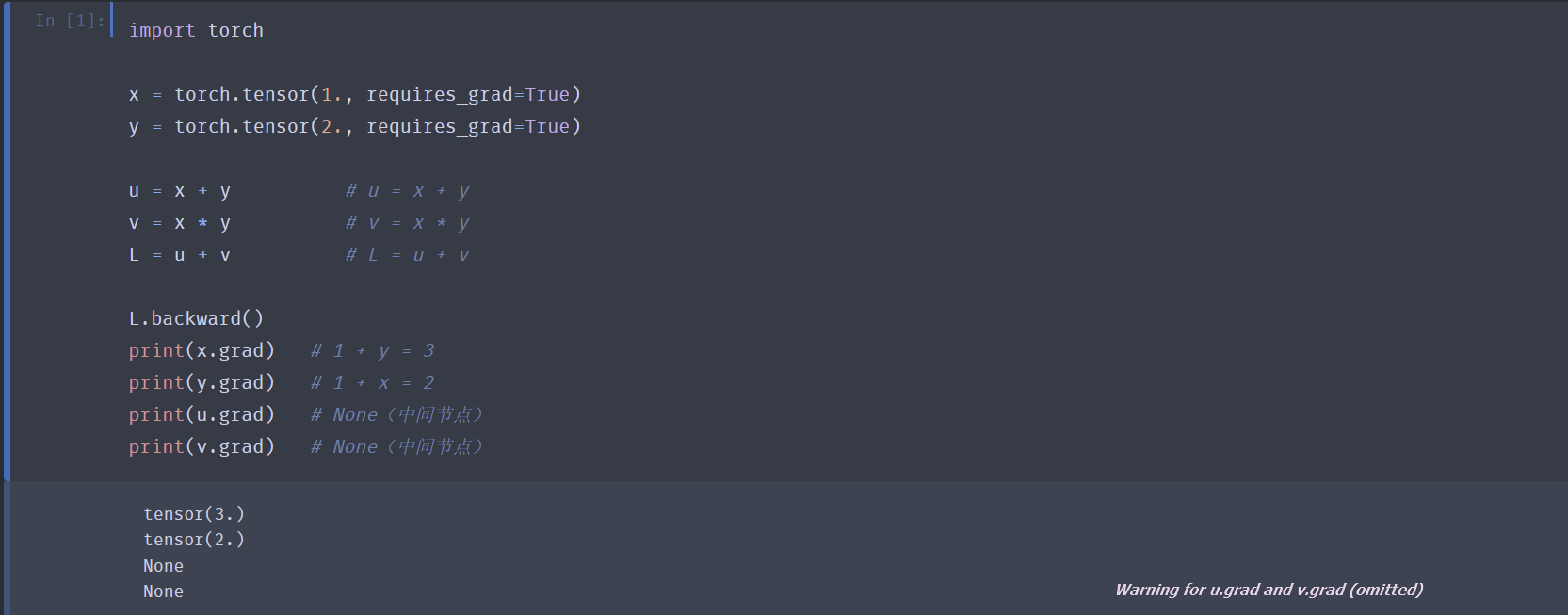
- 中间节点默认不会存梯度,调用中间节点的 grad 的结果一般是 None。如果想要保留可以调用
u.retain_grad().
-
将张量的梯度清零:
x.grad.zero_()- 清零操作不可对 None 执行。
-
反向传播计算梯度:
L.backward()- PyTorch 在调用 L.backward() 时,会沿着所有从 L 能够逆向到达、且 requires_grad=True 的叶子张量的路径同时传播梯度;每一条可行路径都会根据链式法则把局部梯度乘进去,最后在叶子节点处把来自不同路径的贡献求和。
- 例如对于计算图 :
x ---> u --> L \ / / / \ / y ---> v- 计算图中的节点情况
叶子:x、y(用户显式创建,is_leaf=True)
中间:u、v(由运算产生,is_leaf=False)
输出:L(标量) - 前向时 PyTorch 做了什么
每做一次运算就生成一个grad_fn=<OpBackward>对象,并把它挂到结果上;
这些grad_fn组成了一个有向无环图(DAG)。
因此 L 的grad_fn指向 u 和 v,u、v 的grad_fn又指向 x 和 y。形成如下结构:L.grad_fn ├── u.grad_fn ──► x.grad_fn │ └─ y.grad_fn └── v.grad_fn ──► x.grad_fn └─ y.grad_fn - 反向传播的历程
步骤 1:把 L 的梯度初始化为 1(因为是标量)。
步骤 2:从 L 开始反向拓扑遍历整张图:
先走到 u 和 v,分别用 MulBackward0、AddBackward0 之类的函数算出 ∂L/∂u、∂L/∂v
再沿着 u、v 各自的父边继续走到 x、y:
对 x:存在两条路径
L→u→x 贡献 (∂L/∂u)(∂u/∂x)
L→v→x 贡献 (∂L/∂v)(∂v/∂x)
PyTorch 把它们相加后写进 x.grad
对 y:同理,把 L→u→y 与 L→v→y 两条路径的和写进 y.grad - 谁最终有 .grad?
叶子节点 + requires_grad=True:x、y 会收到梯度
中间节点:u、v 的 grad_fn 只是用来计算局部梯度,本身不会保留 .grad
- 计算图中的节点情况
分离计算:希望某些计算移动到计算图之外(在计算梯度的时候视作常数),可以调用拆卸函数来获得副本 tem = y.detach()
- 注意区分几种常见的赋值操作:
| 写法 | 是否 新建 Tensor 对象 |
是否 复制 数据内存 |
是否 保留 requires_grad |
是否 仍连在原 计算图中 |
典型用途 |
|---|---|---|---|---|---|
x = y |
❌ 仅为别名 | ❌ 共享 | ✅ 同 y | ✅ 同一节点 | 只想换个名字,完全共用 |
x = y.detach() |
✅ | ❌ 共享 | ❌ 强制 False | ❌ 从图中剥离 | 只想拿到数值,不做梯度回传 |
x = y.clone() |
✅ | ✅ 复制 | ✅ 同 y | ✅ 仍连图中 | 需要独立副本,但仍要梯度 |
x = y.clone().detach() |
✅ | ✅ 复制 | ❌ 强制 False | ❌ 从图中剥离 | 既要数值副本,又切断梯度 |
线性神经网络
线性回归 linear regression
线性模型
对于一个样本,线性模型的表示式为
其中 \(\hat{y}\) 为预测结果(\({y}\) 为真实结果),\(w_i\) 为权重,\(x_i\) 为输入,\(b\) 为偏移量。
对于特征集合,可以将模型表示为:
损失函数
常见的损失函数是平方误差 \(l^{(i)}(\mathbf{w}, b) = \dfrac{1}{2}(\hat{y}^{(i)} - y^{(i)})^2\). 常数 \(\frac{1}{2}\) 存在的意义是为了对损失函数求导后系数为 \(1\) .
反映到线性模型中,其在整个数据集上的损失均值为:
解析解
将 \(b\) 并入 \(\mathbf{w}\) 中,求解最小化 \(||\mathbf{y} - \mathbf{Xw}||^2\) 时参数的值,可以得到线性回归的解析解 \(\mathbf{w}^{\star} = (\mathbf{X}^T \mathbf{X})^{-1} \mathbf{X}^T \mathbf{y}\).
一般只有简单问题的解析解才好求,因此解析解无法广泛地应用于深度学习之中。
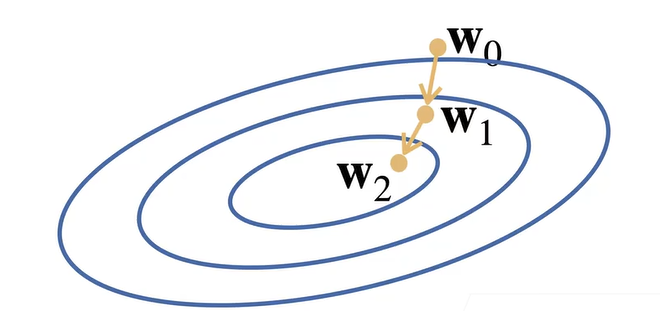
随机梯度下降 SGD
直接求解析解往往效率低下,因此我们常训练模型以高效地求出近似解。
随机梯度下降法的思路是:
-
初始化模型参数的值,比如随机初始化;
-
每一步,沿当前点对应平均损失函数 \(L\) 的梯度方向,走给定步长长度。重复迭代多次。
但裸梯度下降法每次求梯度的时候都需要遍历整个数据集,在数据集较大的情况下效率低下。因此有一个简单的优化是小批量随机梯度下降法:在选取损失函数时并不选择数据集所有样本的平均损失函数,而是从整个数据集中随机抽取小批量样本更新参数。
实现
例:从零开始实现线性回归 simp ver
%matplotlib inline
import random
from mxnet import autograd, np, npx # autograd:MXNet 的自动求导引擎。
from d2l import mxnet as d2l
npx.set_np()
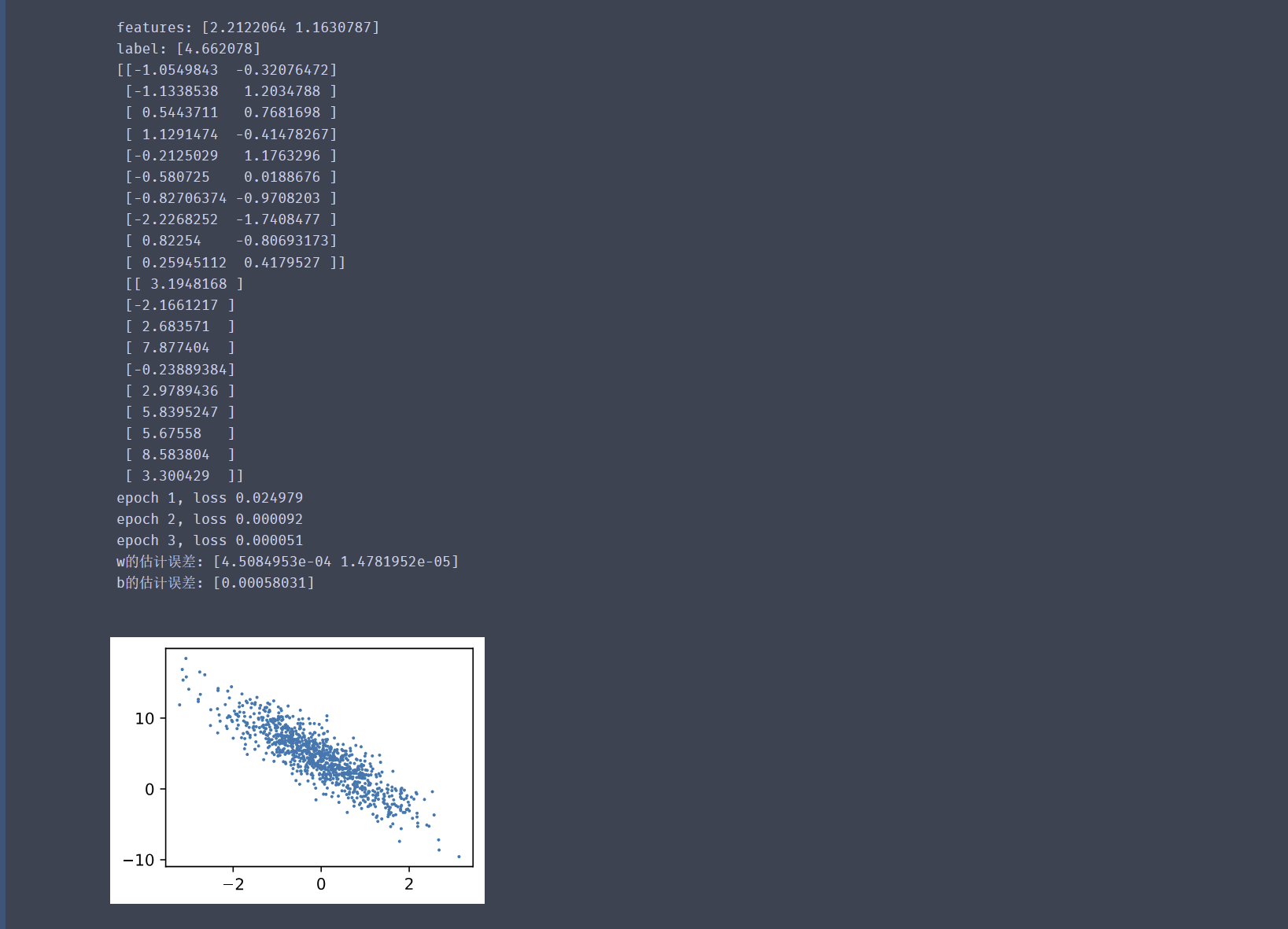
def synthetic_data(w, b, num_examples): #@save
"""生成y=Xw+b+噪声"""
X = np.random.normal(0, 1, (num_examples, len(w))) # 形状 (num_examples, len(w)) 的二维数组,元素服从标准正态分布。
y = np.dot(X, w) + b # 计算「无噪声」标签:y = X·w + b
y += np.random.normal(0, 0.01, y.shape) # 给标签加上一点均值为 0、标准差 0.01 的高斯噪声,使数据更真实。
return X, y.reshape((-1, 1)) # 把 y reshape 成列向量 (num_examples, 1),并返回 (X, y)。
true_w = np.array([2, -3.4]) # 定义「真实」权重和偏置,后面用来衡量模型学得好不好。
true_b = 4.2
features, labels = synthetic_data(true_w, true_b, 1000) # 调用上面函数,生成 1000 条样本;features 是 X,labels 是 y。
print('features:', features[0],'\nlabel:', labels[0]) # 看一下第一条数据长什么样,快速检查数据维度及数值范围。
d2l.set_figsize() # d2l 包绘图相关设置
d2l.plt.scatter(features[:, 1].asnumpy(), labels.asnumpy(), 1);
def data_iter(batch_size, features, labels):
num_examples = len(features)
indices = list(range(num_examples))
# 这些样本是随机读取的,没有特定的顺序
random.shuffle(indices) # 先把样本索引 [0, 1, 2, …, 999] 随机打乱,保证每个 epoch 顺序不同。
for i in range(0, num_examples, batch_size):
batch_indices = np.array(
indices[i: min(i + batch_size, num_examples)])
yield features[batch_indices], labels[batch_indices] # 每次循环返回一个小批量的 (X, y),用 yield 做成生成器,节省内存。
batch_size = 10 # 设置批量大小。
for X, y in data_iter(batch_size, features, labels): # 只迭代一次,打印第一个 batch 的 X 和 y,确认数据迭代器工作正常。
print(X, '\n', y)
break
w = np.random.normal(0, 0.01, (2, 1)) # 权重 w 初始化为形状 (2, 1) 的列向量,元素服从 N(0, 0.01²)。
b = np.zeros(1) # 偏置初始化为 0。
w.attach_grad() # 同 w.requires_grad_(True)
b.attach_grad()
def linreg(X, w, b): #@save
"""线性回归模型"""
return np.dot(X, w) + b # 这里 b 使用了广播机制
def squared_loss(y_hat, y): #@save
"""均方损失"""
return (y_hat - y.reshape(y_hat.shape)) ** 2 / 2
def sgd(params, lr, batch_size): #@save
"""小批量随机梯度下降"""
for param in params:
param[:] = param - lr * param.grad / batch_size # 手动实现 SGD:用当前梯度更新参数。param[:] 是原地赋值,防止创建新内存。
lr = 0.03 # 设置学习率、训练轮数,并把函数指针存到变量中,方便后面统一调用
num_epochs = 3
net = linreg
loss = squared_loss
for epoch in range(num_epochs):
for X, y in data_iter(batch_size, features, labels):
with autograd.record(): # 计算当前 batch 的预测值和损失。
l = loss(net(X, w, b), y) # X和y的小批量损失
# 计算l关于[w,b]的梯度
l.backward() # 反向传播,把损失对 w、b 的梯度写到 w.grad、b.grad。(在sgd函数内是 params.grad)
sgd([w, b], lr, batch_size) # 使用参数的梯度更新参数
train_l = loss(net(features, w, b), labels)
print(f'epoch {epoch + 1}, loss {float(train_l.mean()):f}') # 每轮结束后在整个训练集上计算一次平均损失,打印出来看是否下降。
print(f'w的估计误差: {true_w - w.reshape(true_w.shape)}')
print(f'b的估计误差: {true_b - b}')
例:使用 Gluon 实现线性回归 simp ver
from mxnet import autograd, gluon, np, npx # gluon:高层神经网络 API
from d2l import mxnet as d2l
npx.set_np()
true_w = np.array([2, -3.4])
true_b = 4.2
features, labels = d2l.synthetic_data(true_w, true_b, 1000) # 按线性关系 y = X w + b + ε 随机生成 1000 条样本(同上)
def load_array(data_arrays, batch_size, is_train=True): #@save
# 把 NumPy/MXNet 数组封装成 Gluon 的数据迭代器
dataset = gluon.data.ArrayDataset(*data_arrays) # 把传进来的若干数组(这里是 features 和 labels)打包成一个 ArrayDataset 对象,方便后续按索引取用。
return gluon.data.DataLoader(dataset, batch_size, shuffle=is_train) # 再包一层 DataLoader,实现按批 (batch) 读取、打乱 (shuffle) 训练数据等功能,返回的 data_iter 可以 for X, y in data_iter 这样迭代。
batch_size = 10
data_iter = load_array((features, labels), batch_size) # 用刚写的 load_array 把 features 和 labels 封装成迭代器
print(next(iter(data_iter))) # 手动取一个批次的数据出来看看,验证封装是否正确。
# nn是神经网络的缩写
from mxnet.gluon import nn # 从 mxnet.gluon 再导入子模块 nn,里面封装了层(Layer)和常用网络结构。
net = nn.Sequential() # 实例化一个“顺序容器”网络;以后按添加顺序逐层前向传播。
net.add(nn.Dense(1)) # 向顺序容器里添加一个全连接层 Dense(1)
from mxnet import init # 导入初始化器模块,用来给网络参数赋初值。
net.initialize(init.Normal(sigma=0.01)) # 把网络里的所有待训练参数按 均值为 0、标准差 0.01 的正态分布随机初始化。
loss = gluon.loss.L2Loss() # 定义损失函数为 平方误差损失(L2Loss)
trainer = gluon.Trainer(net.collect_params(), 'sgd', {'learning_rate': 0.03})
# 创建训练器:net.collect_params() 把网络中所有可训练参数收集起来;优化算法选用 'sgd'(随机梯度下降);优化器超参仅设 learning_rate=0.03
num_epochs = 3
for epoch in range(num_epochs):
for X, y in data_iter:
with autograd.record():
l = loss(net(X), y)
l.backward()
trainer.step(batch_size) # 调用优化器,根据刚才算出的梯度更新一次参数。batch_size 用于把梯度除以批大小,实现平均。
l = loss(net(features), labels)
print(f'epoch {epoch + 1}, loss {l.mean().asnumpy():f}') # 打印当前 epoch 的编号以及平均损失值。.asnumpy() 把 MXNet NDArray 转成 NumPy 标量,方便 Python 格式化输出。
w = net[0].weight.data() # 取出网络第 0 层(即我们添加的 Dense(1))的权重参数。
print(f'w的估计误差: {true_w - w.reshape(true_w.shape)}')
b = net[0].bias.data() # 取出网络第 0 层(即我们添加的 Dense(1))的偏置参数
print(f'b的估计误差: {true_b - b}')

归一化指数函数回归 softmax regression
归一化指数函数
softmax 回归解决的是分类问题。具体的,对于 \(n\) 个特征输入及其对应权重,通过线性组合得到 \(m\) 个类别的权值:
得到的权值向量 \(\mathbf{o}\) 中的每个值代表样本是对应类别的可能值,其值越大样本是对应类别的可能性越大。
但是“可能值”并不易于量化,如果能转化成概率会更好比较。因此使用 softmax 函数:\(\mathbf{\hat{y}} = \operatorname{softmax}(\mathbf{o})\),其中
这样得到的预测向量 \(\mathbf{\hat{y}}\) 中的每个值就代表样本是对应类别的概率(\(\hat{y_i} \in (0, 1)\) 且 \(\small\sum\limits_k y_k = 1\)),同时没有改变原有值的大小关系。
交叉熵损失
对于标签向量 \(\mathbf{y}\)(描述样本属于哪个/些类别,是1否0)和预测向量 \(\mathbf{\hat{y}}\),其交叉熵损失函数定义为:
如果样本只属于至多一种类别(比如下例中的Fashion-MNIST数据集),则 \(\mathbf{y}\) 是独热的(只有一位是 \(1\),剩余位全是 \(0\)),此时交叉熵损失可以简化为 \(L = - \log \hat{y_j}\) .
交叉熵损失常用于衡量两个概率之间的差异。原因之一是交叉熵损失的梯度为 \(\partial_{o_j} L(\mathbf{y}, \mathbf{\hat{y}}) = \hat{y_j} - y_j\),这一值在概率较小的情况下较大,从而保证模型在训练后期仍然能保持足够的效率。
例: 从零开始实现softmax回归 simp ver
import torch
from IPython import display # 用于在 Notebook 中动态刷新图表
from d2l import torch as d2l
batch_size = 256 # 每次送入网络的样本张数
import os, pathlib, torchvision
from torchvision import transforms
from torch.utils.data import DataLoader
data_dir = pathlib.Path.home() / 'Datasets' / 'FashionMNIST' # 数据集保存路径
trans = transforms.ToTensor()
mnist_train = torchvision.datasets.FashionMNIST(
root=str(data_dir), train=True, transform=trans, download=True) # 训练集:root 指定目录,train=True 表示训练集,download=True 会自动下载
mnist_test = torchvision.datasets.FashionMNIST(
root=str(data_dir), train=False, transform=trans, download=True) # 测试集:train=False
train_iter = DataLoader(mnist_train, batch_size=256, shuffle=True)
test_iter = DataLoader(mnist_test, batch_size=256, shuffle=False)
num_inputs = 784 # 每张图片 28×28=784 个像素作为输入特征 (n=784)
num_outputs = 10 # Fashion-MNIST 共 10 类 (m=10)
W = torch.normal(0, 0.01, size=(num_inputs, num_outputs), requires_grad=True) # 权重矩阵:784×10,正态初始化 N(0,0.01),自动求导
b = torch.zeros(num_outputs, requires_grad=True) # 偏置向量:长度为 10,初始化为 0
def softmax(X):
X_exp = torch.exp(X) # 对每个元素做 e^x
partition = X_exp.sum(1, keepdim=True) # 每行求和,得到归一化因子
return X_exp / partition # 这里应用了广播机制:每行除以该行总和
def net(X):
# X 原始形状 (batch,1,28,28),先 reshape 成 (batch,784),再与 W 做矩阵乘法,加偏置 b,最后过 softmax
return softmax(torch.matmul(X.reshape((-1, W.shape[0])), W) + b)
def cross_entropy(y_hat, y):
return - torch.log(y_hat[range(len(y_hat)), y]) # 交叉熵损失
def accuracy(y_hat, y): #@save
"""计算预测正确的数量"""
if len(y_hat.shape) > 1 and y_hat.shape[1] > 1:
y_hat = y_hat.argmax(axis=1)
cmp = y_hat.type(y.dtype) == y # 布尔张量:True 表示预测正确
return float(cmp.type(y.dtype).sum()) # 把 True 转 1 后求和
def evaluate_accuracy(net, data_iter): #@save
"""计算在指定数据集上模型的精度"""
if isinstance(net, torch.nn.Module):
net.eval() # 将模型设置为评估模式
metric = Accumulator(2) # 正确预测数、预测总数
with torch.no_grad(): # 不计算梯度,减少内存/加速
for X, y in data_iter:
metric.add(accuracy(net(X), y), y.numel()) # 累加
return metric[0] / metric[1] # 返回准确率
class Accumulator: #@save
"""在n个变量上累加"""
def __init__(self, n):
self.data = [0.0] * n
def add(self, *args):
self.data = [a + float(b) for a, b in zip(self.data, args)]
def reset(self):
self.data = [0.0] * len(self.data)
def __getitem__(self, idx):
return self.data[idx]
evaluate_accuracy(net, test_iter)
def train_epoch_ch3(net, train_iter, loss, updater): #@save
"""训练模型一个迭代周期(定义见第3章)"""
# 将模型设置为训练模式
if isinstance(net, torch.nn.Module):
net.train()
metric = Accumulator(3) # 分别累加「损失和」「正确数」「样本数」
for X, y in train_iter:
# 计算梯度并更新参数
y_hat = net(X) # y_hat[i, k] 代表第 i 张图片被模型判定为类别 k 的概率。
l = loss(y_hat, y)
if isinstance(updater, torch.optim.Optimizer):
# 使用PyTorch内置的优化器和损失函数
updater.zero_grad()
l.mean().backward() # 对平均损失求梯度
updater.step()
else:
# 使用定制的优化器和损失函数
l.sum().backward() # 使用 d2l.sgd 自定义批量梯度下降
updater(X.shape[0]) # 传入批量大小,更新 W,b
metric.add(float(l.sum()), accuracy(y_hat, y), y.numel())
# 返回训练损失和训练精度
return metric[0] / metric[2], metric[1] / metric[2] # 返回平均损失、平均准确率
class Animator: #@save
"""在动画中绘制数据"""
def __init__(self, xlabel=None, ylabel=None, legend=None, xlim=None,
ylim=None, xscale='linear', yscale='linear',
fmts=('-', 'm--', 'g-.', 'r:'), nrows=1, ncols=1,
figsize=(3.5, 2.5)): # 初始化坐标轴、线型、图例等
# 增量地绘制多条线
if legend is None:
legend = []
d2l.use_svg_display()
self.fig, self.axes = d2l.plt.subplots(nrows, ncols, figsize=figsize)
if nrows * ncols == 1:
self.axes = [self.axes, ]
# 使用lambda函数捕获参数
self.config_axes = lambda: d2l.set_axes(
self.axes[0], xlabel, ylabel, xlim, ylim, xscale, yscale, legend)
self.X, self.Y, self.fmts = None, None, fmts
def add(self, x, y): # 每调用一次把新点画到图上
# 向图表中添加多个数据点
if not hasattr(y, "__len__"):
y = [y]
n = len(y)
if not hasattr(x, "__len__"):
x = [x] * n
if not self.X:
self.X = [[] for _ in range(n)]
if not self.Y:
self.Y = [[] for _ in range(n)]
for i, (a, b) in enumerate(zip(x, y)):
if a is not None and b is not None:
self.X[i].append(a)
self.Y[i].append(b)
self.axes[0].cla()
for x, y, fmt in zip(self.X, self.Y, self.fmts):
self.axes[0].plot(x, y, fmt)
self.config_axes()
display.display(self.fig) # 在 Notebook 中实时刷新
display.clear_output(wait=True)
def train_ch3(net, train_iter, test_iter, loss, num_epochs, updater): #@save
"""训练模型(定义见第3章)"""
animator = Animator(xlabel='epoch', xlim=[1, num_epochs], ylim=[0.3, 0.9],
legend=['train loss', 'train acc', 'test acc']) # 创建画布
for epoch in range(num_epochs):
train_metrics = train_epoch_ch3(net, train_iter, loss, updater) # 训练一个 epoch
test_acc = evaluate_accuracy(net, test_iter) # 评估测试集
animator.add(epoch + 1, train_metrics + (test_acc,))
train_loss, train_acc = train_metrics
# 训练完做断言,确保指标合理
assert train_loss < 0.5, train_loss
assert train_acc <= 1 and train_acc > 0.7, train_acc
assert test_acc <= 1 and test_acc > 0.7, test_acc
lr = 0.05 # 学习率
def updater(batch_size):
return d2l.sgd([W, b], lr, batch_size) # 使用 d2l 封装的随机梯度下降,对 [W,b] 做更新
num_epochs = 10
train_ch3(net, train_iter, test_iter, cross_entropy, num_epochs, updater)
def predict_ch3(net, test_iter, n=6): #@save
"""预测标签(定义见第3章)"""
for X, y in test_iter:
break
trues = d2l.get_fashion_mnist_labels(y) # 数字 -> 文本标签
preds = d2l.get_fashion_mnist_labels(net(X).argmax(axis=1))
titles = [true +'\n' + pred for true, pred in zip(trues, preds)]
d2l.show_images(
X[0:n].reshape((n, 28, 28)), 1, n, titles=titles[0:n])
predict_ch3(net, test_iter) # 显示 6 张图及真实/预测标签
例:softmax 回归的简洁实现 simp ver
import torch
from torch import nn
from d2l import torch as d2l
batch_size = 256
import os, pathlib, torchvision
from torchvision import transforms
from torch.utils.data import DataLoader
data_dir = pathlib.Path.home() / 'Datasets' / 'FashionMNIST'
trans = transforms.ToTensor()
mnist_train = torchvision.datasets.FashionMNIST(
root=str(data_dir), train=True, transform=trans, download=True)
mnist_test = torchvision.datasets.FashionMNIST(
root=str(data_dir), train=False, transform=trans, download=True)
train_iter = DataLoader(mnist_train, batch_size=256, shuffle=True)
test_iter = DataLoader(mnist_test, batch_size=256, shuffle=False)
# PyTorch不会隐式地调整输入的形状。因此,
# 我们在线性层前定义了展平层(flatten),来调整网络输入的形状
net = nn.Sequential(nn.Flatten(), nn.Linear(784, 10)) # 定义网络
# nn.Flatten():把张量中除第 0 维(batch 维)以外的所有维拉成一条长向量。在 softmax 回归里,它把 (B, 1, 28, 28) 变成 (B, 784),方便后面全连接层接收。
# nn.Linear(in_features, out_features):全连接(仿射变换)。y = xWᵀ + b其中 x 是 (batch, in_features),W 是 (out_features, in_features),b 是 (out_features,),输出 y 为 (batch, out_features)。
def init_weights(m): # 定义一个回调函数,当遍历到某层 m 是 nn.Linear 时,把 m.weight 用 均值为 0、标准差 0.01 的正态分布重新初始化;偏置 bias 默认初始化为 0。
if type(m) == nn.Linear:
nn.init.normal_(m.weight, std=0.01)
net.apply(init_weights); # 递归地对 net 内部所有子模块调用 init_weights,实现权重初始化。
loss = nn.CrossEntropyLoss(reduction='none')
# nn.CrossEntropyLoss 内部先对网络输出做 softmax,再计算负对数似然。
# reduction='none' 表示 不 做平均/求和,返回每个样本的 loss(shape (batch_size,)),方便后续手动调权。
trainer = torch.optim.SGD(net.parameters(), lr=0.1) # 定义优化器:使用 随机梯度下降 (SGD),学习率 0.1。
# net.parameters() 返回所有待训练张量(权重、偏置)。
num_epochs = 10
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
常见评价模型训练好坏的参数:
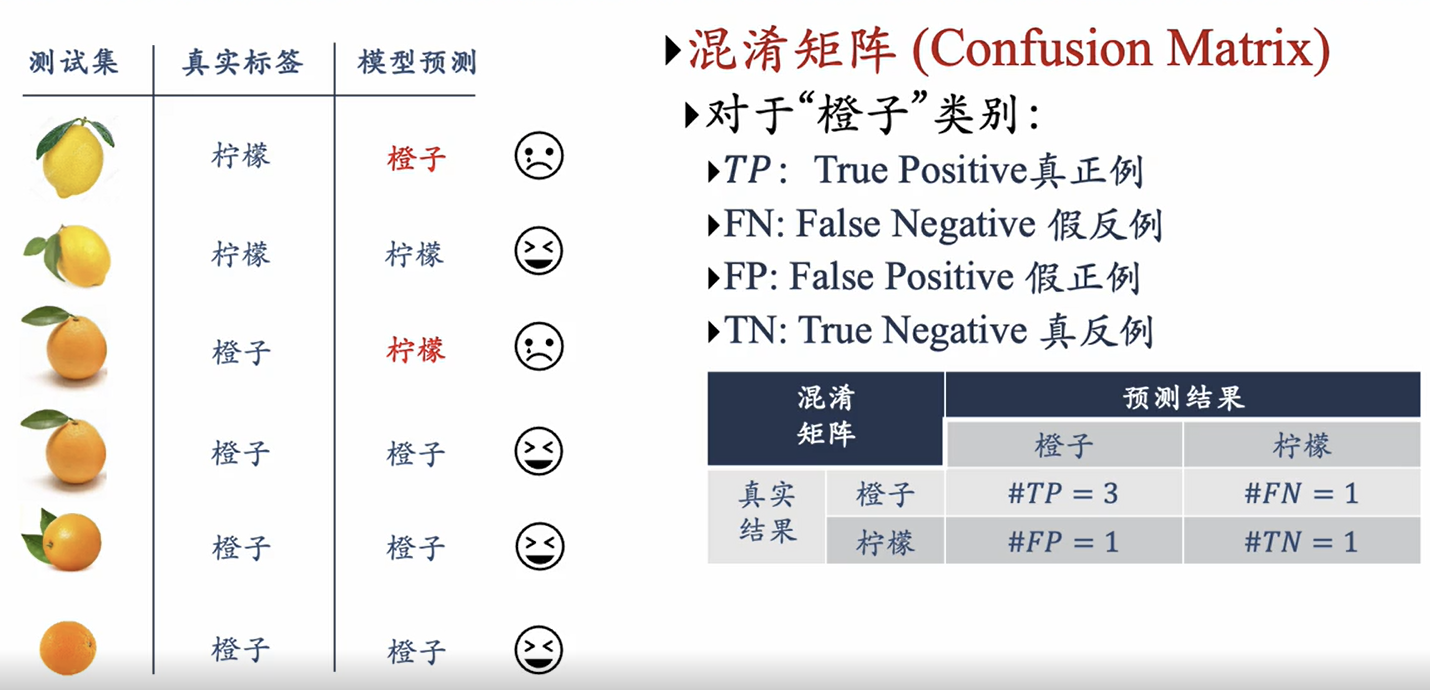
精确率 precision:\(\text{pre} = \dfrac{\text{TP}}{\text{TP} + \text{FP}}\)
召回率 recall:\(\text{rec} = \dfrac{\text{TP}}{\text{TP} + \text{FN}}\)
F1值:\(\text{F1} = \dfrac{2 \times \text{pre} \times \text{rec}}{\text{pre} + \text{rec}}\)
深度神经网络
多层感知机 Multilayer Perceptron
感知机
感知机用于解决二分类问题:对于空间中的若干两种颜色的点,需要找到一组 \(\mathbf{w}, b\),构成超平面 \(\mathbf{w x} + b = 0\) 将两种颜色的点恰分隔在平面两侧。(假设总存在至少一个超平面可以满足要求)
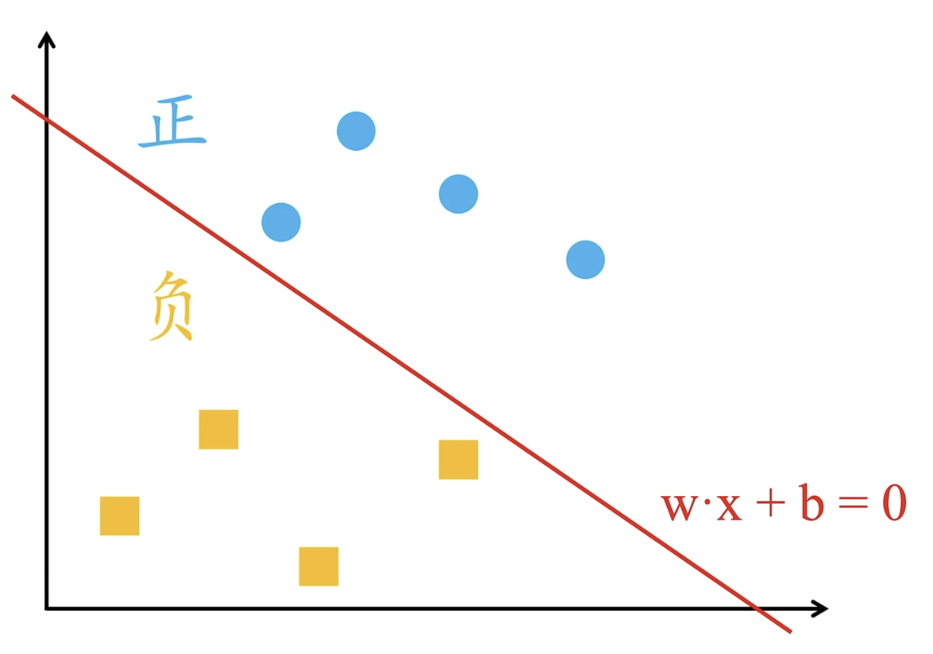
感知机的激活函数选择为取符号函数 \(\operatorname{sgn}(x) = \dfrac{x}{|x|}\)。具体地,感知机的方程为 \(y = \begin{cases} 1 &, \mathbf{wx} + b > 0 \\ -1 &, \mathbf{wx} + b \le 0 \end{cases}\) (等号可任意归类。当然,这是细枝末节)。而损失函数则由分类错误的点到分割面的距离之和决定,即 \(d = \dfrac{1}{\| \mathbf{w} \|}|\mathbf{w} \cdot \mathbf{x_0} + b|\) 。进一步考虑拆掉绝对值,发现 \(d = \dfrac{1}{\| \mathbf{w} \|}( -y_0 (\mathbf{w} \cdot \mathbf{x_0} + b))\) 。而实际上感知机只需要完成分类任务,不关注分割面是否“比较居中”地分离了二者,因此每个点到分割面的距离大小并不是感知机关注的重点,故删去距离公式中的范数因子,最终得到的损失函数为 \(l = - \sum\limits_{x_i \in M_e} y_i (\mathbf{w} \cdot \mathbf{x_i} + b)\),其中 \(M_e\) 表示分类错误的点的集合。
实际上,在感知机被发明的那个年代,训练模型的手段还比较落后。当时选择的手段是一个一个点迭代(当时的人们还没有意识到梯度下降法),思路如下:
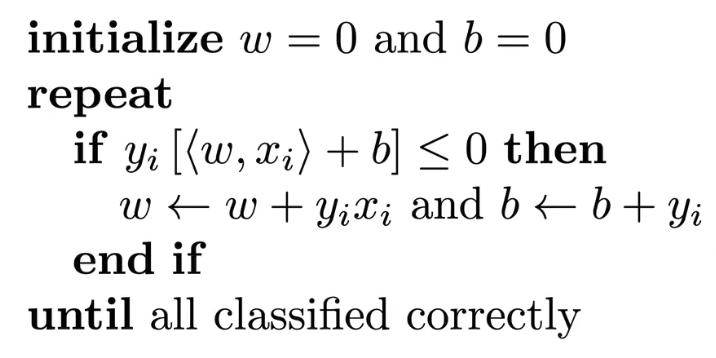
从现在的角度看,感知机的训练手段其实就是使用批量大小为 1 的梯度下降法,而损失函数则为 \(L(y, \mathbf{x}, \mathbf{w}) = \operatorname{ReLU}(-y \langle \mathbf{w}, \mathbf{x} \rangle)\) 。
多层感知机
感知机只能解决二分类问题,但现实中大部分分类问题不只两层(比如异或,这是一个二元输入一元输出四分类问题)。因此使用多层感知机来实现更复杂的分类问题。
相比线性神经网络,多层感知机在输入层和输出层之间添加了若干隐藏层,实现从线性问题到非线性问题。简单起见,我们先考虑只有一层隐藏层的多层感知机。
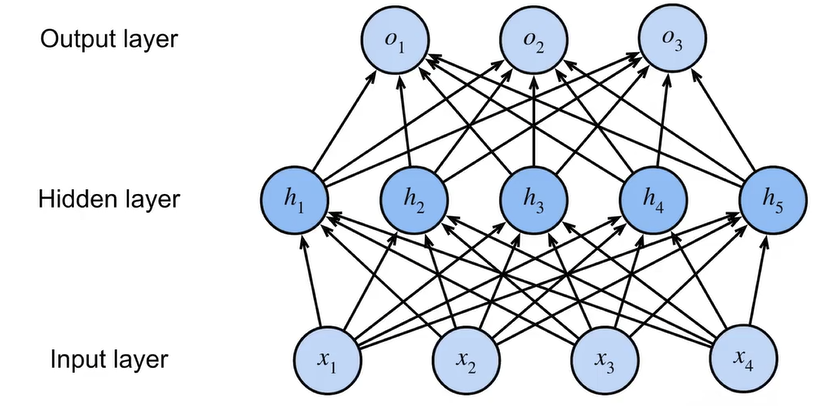
该多层感知机的变换公式如下:
其中 \(\sigma(\mathbf{X})\) 被称为激活函数,用于压缩输出,以拟合复杂的函数(如果不加激活函数,多层感知机将退化为线性模型)。激活函数往往是非线性的逐元素函数。以下给出若干常见的激活函数:
-
ReLU 函数
\[\operatorname{ReLU}(x) = \max(x, 0) \]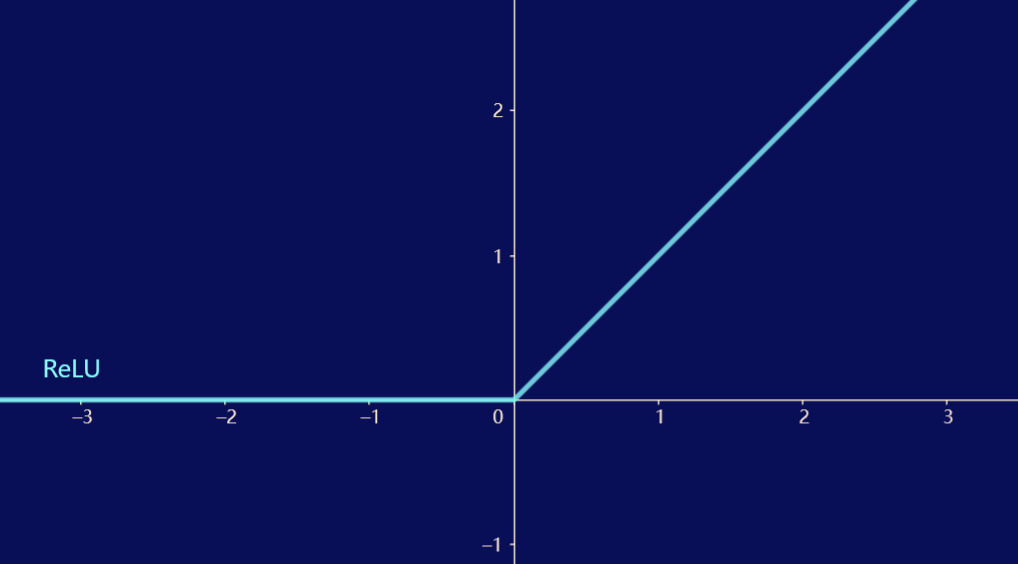
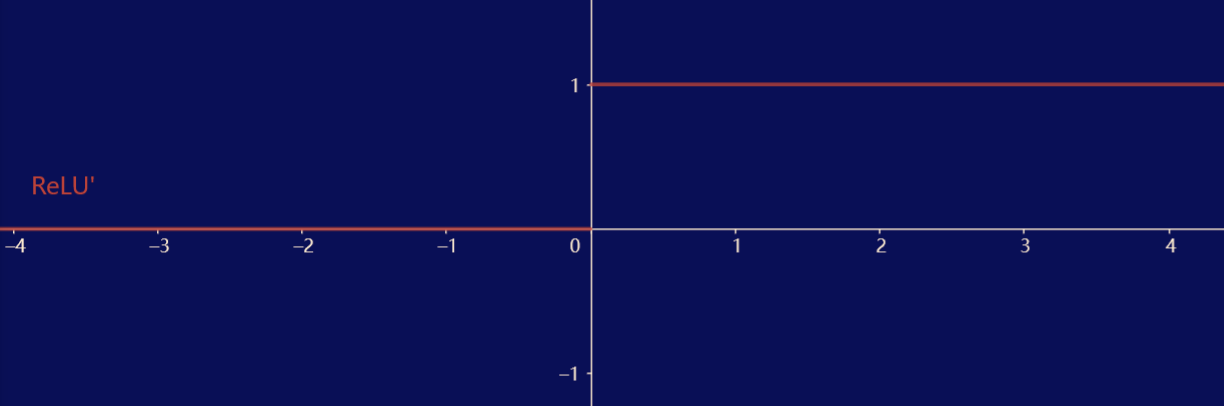
ReLU 函数仅保留正元素而丢弃所有负元素,呈分段线性状态。ReLU 函数的导数在负输入时为 \(0\),而在正输入时为 \(1\),并规定输入为 0 时 ReLU 函数的导数取 \(0\),从而实现较好的求导表现。 -
sigmoid 函数
\[\operatorname{sigmoid}(x) = \dfrac{1}{1 + e^{-x}} \]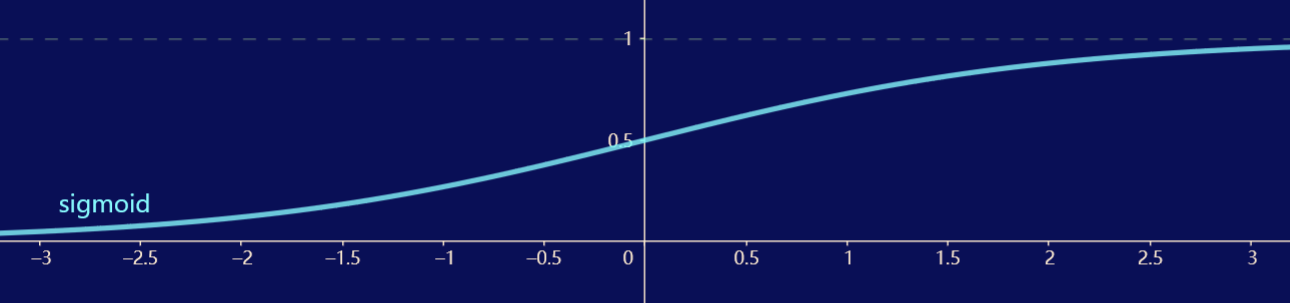

sigmoid 函数是一个平滑可微的值域为 \((0, 1)\) 的激活函数,常用于在输出是分类问题的概率时作为输出单元上的激活函数。sigmoid 函数的导数是单峰函数,在 0 处取得最大值 \(0.25\),离 0 越远取值越接近 \(0\)。 -
tanh 函数
\[\operatorname{tanh}(x) = \dfrac{1 - e^{-2x}}{1 + e^{-2x}} \]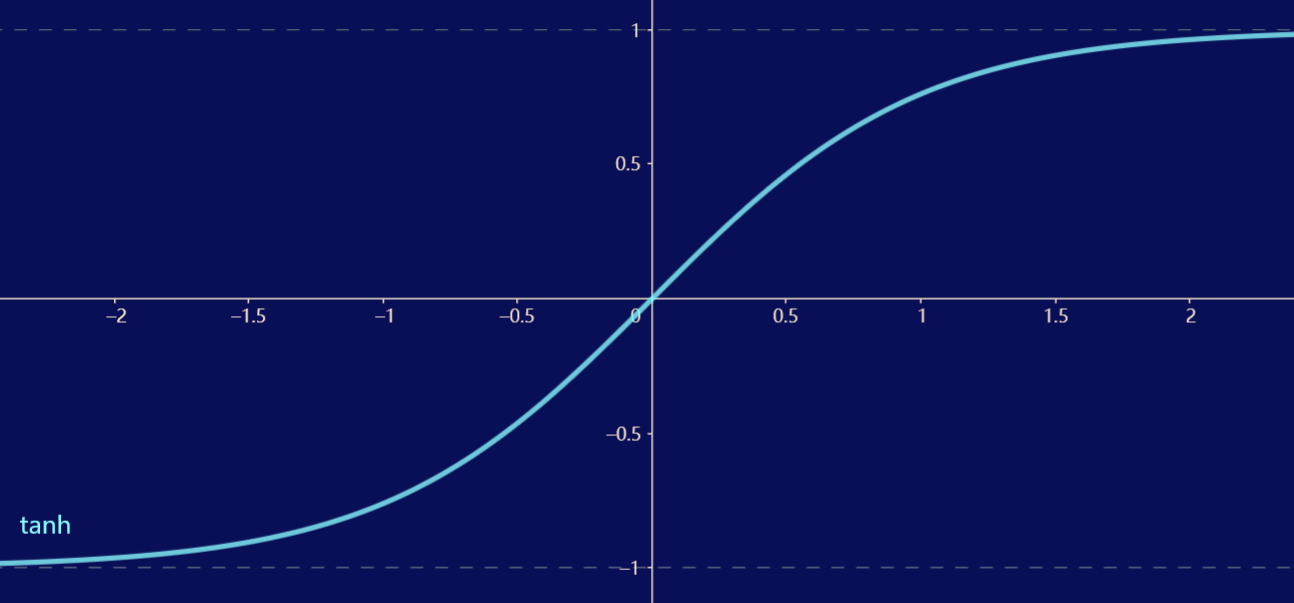
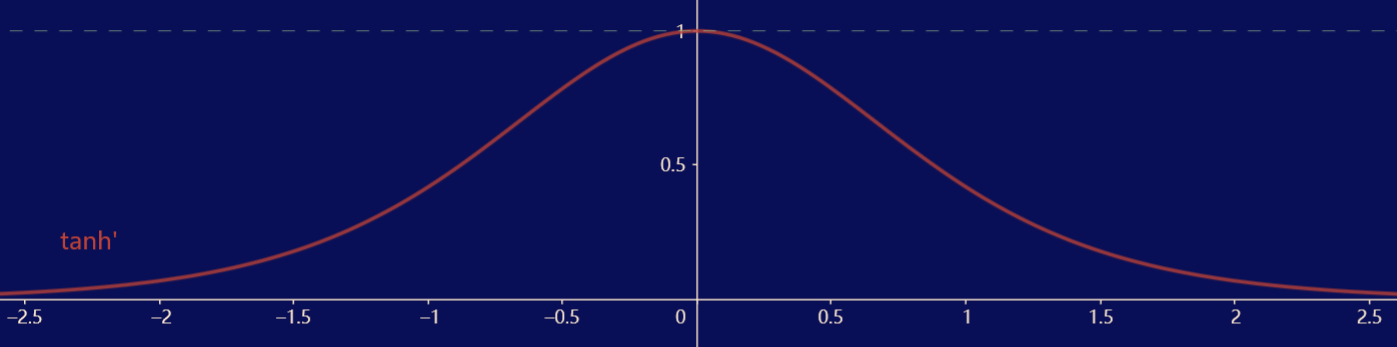
tanh 函数是一个平滑可微的值域为 \((-1, 1)\) 的激活函数,不同于 sigmoid 函数,tanh 函数关于原点对称。tanh 函数的导数是单峰函数,在 0 处取得最大值 \(1\),离 0 越远取值越接近 \(0\)。
例:从零开始实现多层感知机 simp ver
import torch
from torch import nn
from d2l import torch as d2l
batch_size = 256
import os, pathlib, torchvision
from torchvision import transforms
from torch.utils.data import DataLoader
data_dir = pathlib.Path.home() / 'Datasets' / 'FashionMNIST'
trans = transforms.ToTensor()
mnist_train = torchvision.datasets.FashionMNIST(
root=str(data_dir), train=True, transform=trans, download=True)
mnist_test = torchvision.datasets.FashionMNIST(
root=str(data_dir), train=False, transform=trans, download=True)
train_iter = DataLoader(mnist_train, batch_size=256, shuffle=True)
test_iter = DataLoader(mnist_test, batch_size=256, shuffle=False)
num_inputs, num_outputs, num_hiddens = 784, 10, 256 # 输入层、输出层、隐藏层节点个数
# 初始化参数
W1 = nn.Parameter(torch.randn(
num_inputs, num_hiddens, requires_grad=True) * 0.01)
b1 = nn.Parameter(torch.zeros(num_hiddens, requires_grad=True))
W2 = nn.Parameter(torch.randn(
num_hiddens, num_outputs, requires_grad=True) * 0.01)
b2 = nn.Parameter(torch.zeros(num_outputs, requires_grad=True))
params = [W1, b1, W2, b2] # 收集所有待优化参数,后面传给 torch.optim.SGD
def relu(X):
a = torch.zeros_like(X) # zeros_like 生成和 X 形状相同的全 0 张量,避免显式写形状。
return torch.max(X, a)
def net(X):
X = X.reshape((-1, num_inputs))
H = relu(X@W1 + b1) # @ 是 Python 3.5+ 的矩阵乘运算符
return (H@W2 + b2) # 广播机制会把 (256,) 的 b1 自动扩展到 (batch,256);
loss = nn.CrossEntropyLoss(reduction='none') # 多类别交叉熵,接收 logits 和类别索引.reduction='none' 返回每个样本的 loss,便于后续自定义求平均或加权
num_epochs, lr = 10, 0.1
updater = torch.optim.SGD(params, lr=lr) # updater 是一个 SGD 优化器,后续 updater.step() 做参数更新。
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, updater) # 封装好的训练循环:
d2l.predict_ch3(net, test_iter) # d2l.predict_ch3(net, test_iter)
例:多层感知机的简洁实现 simp ver
import torch
from torch import nn
from d2l import torch as d2l
import os, pathlib, torchvision
from torchvision import transforms
from torch.utils.data import DataLoader
data_dir = pathlib.Path.home() / 'Datasets' / 'FashionMNIST'
trans = transforms.ToTensor()
mnist_train = torchvision.datasets.FashionMNIST(
root=str(data_dir), train=True, transform=trans, download=True)
mnist_test = torchvision.datasets.FashionMNIST(
root=str(data_dir), train=False, transform=trans, download=True)
train_iter = DataLoader(mnist_train, batch_size=256, shuffle=True)
test_iter = DataLoader(mnist_test, batch_size=256, shuffle=False)
batch_size, lr, num_epochs = 256, 0.1, 10
net = nn.Sequential(nn.Flatten(), # 输入层,展平用
nn.Linear(784, 256), # 隐藏层
nn.ReLU(), # 隐藏层的激活函数
nn.Linear(256, 10)) # 输出层
def init_weights(m):
if type(m) == nn.Linear: # 如果是 Linear 层,就用正态分布初始化权重,标准差 0.01
nn.init.normal_(m.weight, std=0.01)
net.apply(init_weights)
loss = nn.CrossEntropyLoss(reduction='none')
trainer = torch.optim.SGD(net.parameters(), lr=lr)
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
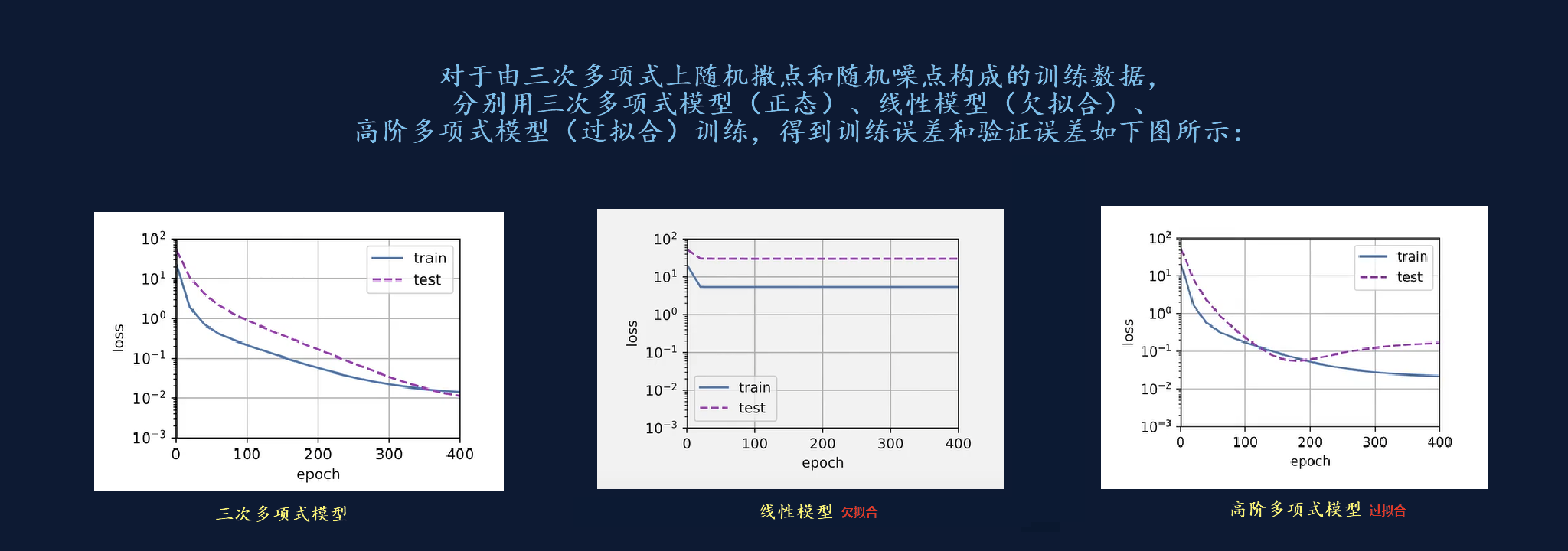
模型拟合 model fitting
误差
-
训练误差:模型在训练集上的误差。
-
泛化误差:模型在从原始样本的分布中抽取无限多数据样本时的误差。
-
验证误差:模型在验证集上的误差。
原则上,在确定所有超参数之前,模型不应接触测试集。因此需要用验证集来判断模型的拟合程度,即用验证误差去估计泛化误差。当训练数据稀缺时,常用 K折交叉验证 来处理这一问题:将原始训练数据随机均分为 \(K\) 份,每次实验在 \(K - 1\) 个子集上进行训练,并在剩余的 \(1\) 个子集上进行验证。最后将 \(K\) 次实验的结果取平均来估计误差。
拟合
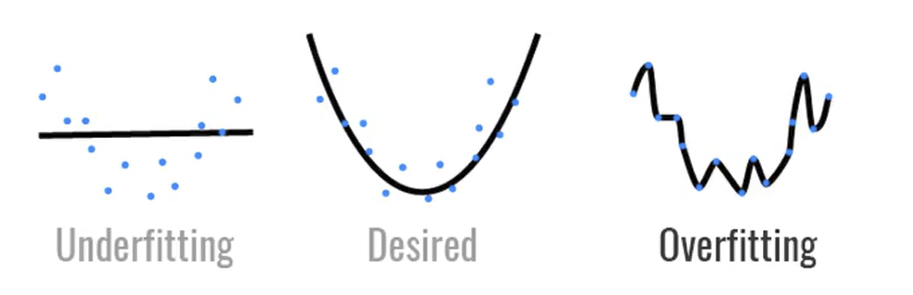
-
欠拟合:训练误差和验证误差都很大,模型容量小于数据复杂度。
对于欠拟合,模型无法减小训练误差(表达力不足),我们有理由相信可以用一个更复杂的模型减小训练误差。 -
过拟合:训练误差远小于验证误差,模型容量大于数据复杂度。
对于过拟合,模型往往只“记住”训练集的数据,而没有“理解”其背后的规律。高容量的模型由于其自身的灵活性,容易产生过拟合现象。但验证误差和训练误差之间的差距较大并不总是一件坏事,在深度学习领域,即使是最好的预测模型在训练集上的表现往往比在验证集上好,因此我们通常关心训练误差,而非二者间的差距。
解决过拟合的技术被称为正则化。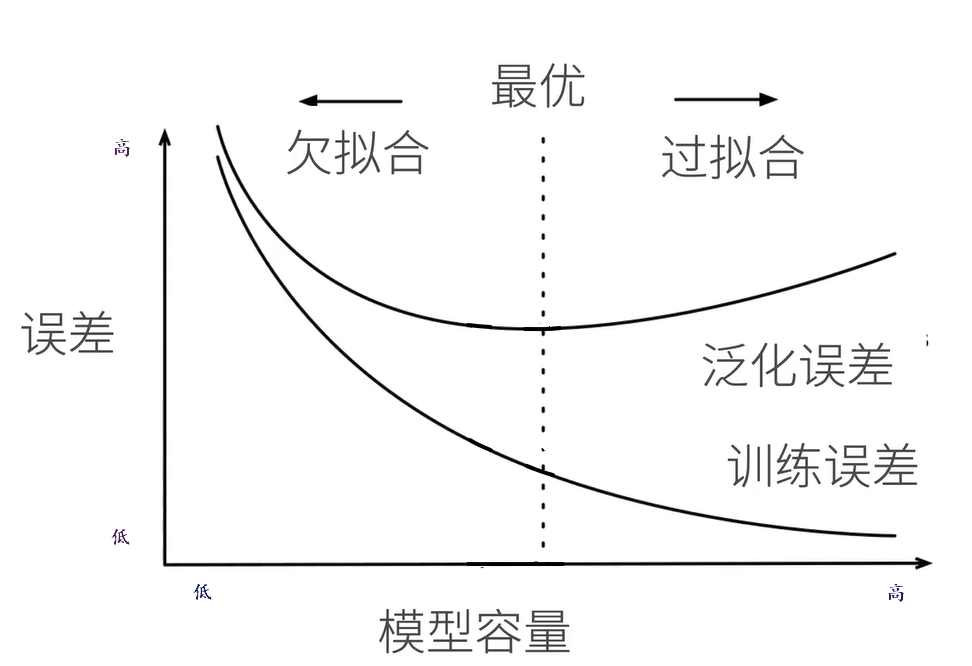
权重衰退法 weight decay
以线性模型 \(\mathbf{\hat{y}} = \mathbf{Xw} + \mathbf{b}\) 为例。权重衰退法解决过拟合的思路是避免产生过大的 \(w\),具体地,模型在限制损失函数 \(l(\mathbf{w}, b) = \dfrac{1}{n} l^{(i)}(\mathbf{w}, b) = \dfrac{1}{n} \sum\limits_{i=1}^{n}\dfrac{1}{2}(\mathbf{w}^T\mathbf{x}^{(i)}+b-y^{(i)})^2\) 最小时也需要保证 \(|| w || ^2 \le \theta\).
可以证明,对于每个 \(\theta\),都可以找到一个 \(\lambda\) 使得之前的两条限制等价于令下面的总损失函数最小:
原本的 \(w\) 的迭代方程为 \(w_{t+1} = w_{t} - \eta \dfrac{\partial l(w_t, b_t)}{\partial w_t}\),而权重衰退法的迭代方程为 \(w_{t+1} = (1 - \eta \lambda)w_{t} - \eta \dfrac{\partial l(w_t, b_t)}{\partial w_t}\). 通常情况下 \(0 < \eta \lambda < 1\),从而使 \(w_{t}\) 这一项在迭代时产生的作用变小,实现约束 \(w\) 大小的目的。
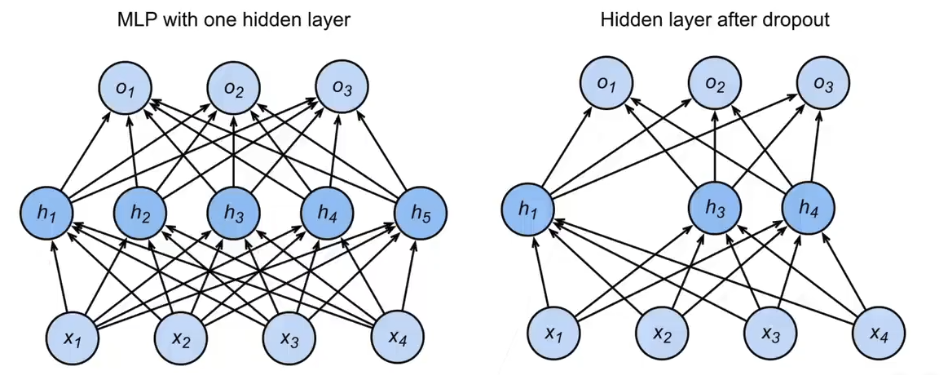
暂退法 dropout
暂退法通过在前向传播时随机删除部分节点实现正则化。暂退法的中心思想是给每一层注入无偏差(期望不变)的噪声,具体地,dropout 函数会使中间激活值进行以下操作:
例如,对于单隐藏层的网络:
使用暂退法后变为:
对于这个隐藏层,部分节点被随机删除,而整个层元素的期望值不变。一种理解方式是,暂退法相当于同时训练了 \(2^m\) 个“子网络”(\(m\) 是进行暂退法的层的元素个数之和),最后做模型平均,减小泛化误差。
卷积神经网络 Convolutional Neural Network
卷积层
考虑现在需要在一张彩色二维图像上识别目标,使用多层感知机的思路会列出如下公式:
但是多层感知机使用全连接层,对于图片这种数据量较大的输入会产生极多的参数,模型无法承受,因此需要优化上述公式。
平移不变性
平移不变性的原理是:输出不应因为检测目标出现在输入图像的位置变化而不同。换言之,\(U\) 和 \(V\) 与 \(i,j\) 无关,因此公式可以简化为:
局部性
局部性的原理是:检测目标应当集中于输入图像的一部分。换言之,计算 \(H_{i,j}\) 时不应考虑距离 \((i,j)\) 很远的地方,因此公式可以化简为:
化简到这一步参数较全连接层已经极大简化。我们称这样的层为卷积层,称 \(V\) 为卷积核。与全连接层对比,\(V\) 就是卷积层的参数。
手动设置卷积核
卷积核虽然小,但能做的事情很多。以图像边缘检测为例:
假设有如下黑白图像,中间是黑色(0),两侧是白色(1),共两条纵向边缘。
tensor([[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.]])
利用 \(1 \times 2\) 卷积核 tensor([[1.0, -1.0]]) (实操卷积核应该是正方形,此处仅作演示)与该图像做卷积,得到如下结果:
tensor([[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.]])
可以看到检测到两条纵向边界,其中 1 代表从白色到黑色的边缘,-1 代表从黑色到白色的边缘。
学习卷积核
对于更复杂的情况,我们需要学习卷积核。这一操作与全连接层的模型学习是类似的。
例:简单卷积核的学习 simp ver
import torch
from torch import nn
from d2l import torch as d2l
def corr2d(X, K): #@save
"""计算二维互相关运算"""
h, w = K.shape
Y = torch.zeros((X.shape[0] - h + 1, X.shape[1] - w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i, j] = (X[i:i + h, j:j + w] * K).sum()
return Y
X = torch.ones((6, 8))
X[:, 2:6] = 0 # X 是6行8列的黑白图像,其中最左两列和最右两列是1(白),中间四列是0(黑)
K = torch.tensor([[1.0, -1.0]]) # K 是上例中的竖直边缘检测核,K不会直接参与训练,我们的目标是让卷积核的学习结果与其相近
Y = corr2d(X, K) # Y 是 X 和 K 的卷积结果,用于训练
conv2d = nn.Conv2d(1,1, kernel_size=(1, 2), bias=False) # 输入通道、输出通道、核大小、忽略偏置
# 这个二维卷积层使用四维输入和输出格式(批量大小、通道、高度、宽度),
# 其中批量大小和通道数都为1
X = X.reshape((1, 1, 6, 8))
Y = Y.reshape((1, 1, 6, 7))
lr = 3e-2 # 学习率
for i in range(10): # 训练10轮
Y_hat = conv2d(X)
l = (Y_hat - Y) ** 2
conv2d.zero_grad()
l.sum().backward()
# 迭代卷积核
conv2d.weight.data[:] -= lr * conv2d.weight.grad
if (i + 1) % 2 == 0:
print(f'epoch {i+1}, loss {l.sum():.3f}')
conv2d.weight.data.reshape((1, 2)) # 输出结果。实测为 tensor([[ 0.9508, -1.0260]]),与原本的 K 相近
多通道
实际上图片并非二维的,还会有第三通道表示RGB等(多输入通道),以及我们有时需要对同一输入产生多种不同的输出(多输出通道),因此我们需要将公式修改为:
具体处理时,卷积层对每个通道设置对应卷积核进行卷积操作,最后将这 \(c\) 个卷积后的结果加起来进行汇总。对于多输出通道,每个通道均执行一次上述操作,注意同一输入通道的卷积核对于不同的输出通道是不同的,最后得到 \(d\) 个结果,将其叠放(stack)得到一个三维张量结果。
池化层
池化的思想是将原输入的局部合并成一个点。常用的池化方法有两种,一种是最大池化,一种是平均池化。具体操作的时候设置一个 \(p \times q\) 的窗口遍历每一个位置,得到最后的输出。
\(p\) 和 \(q\) 一般不会很大,步长设置与窗口长宽相同。
池化删去了输入中的很多点(比如设置 \(2 \times 2\) 的窗口输出就只有原图的\(\frac{1}{4}\)),但其信息丢失并不多。在过去池化往往被用于内存减负,现在结合上卷积层,池化操作可以明显扩大感受野,等价于用更大核却不增加参数,是非常优雅的操作。


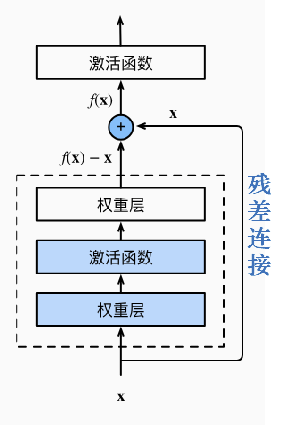
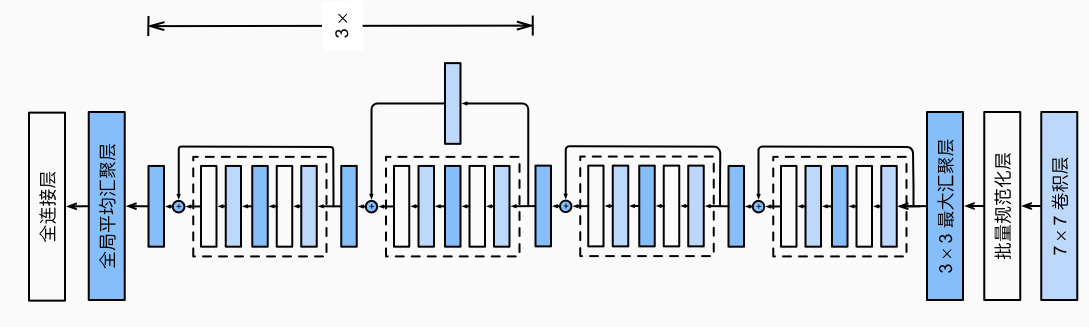
残差连接
残差连接是ResNet的独特操作。在神经网络层数很深时,参数可能难以学习(网络退化),残差连接通过将之前浅层训练的结果跳跃地传入深层,并将训练函数减去连接的值。这样在最坏的情况下,如果被越过的部分已经难以学习,那么无非就是这一部分没有贡献,而连接的值继续前向传播,不会影响后面的运算。这样,神经网络可以做得很深而无需担心训练困难的问题。
注意力机制 Attention Mechanism
query, key, value
在生物学中有两种注意力机制,一种是由于环境中某物体具有特殊性质,我们非自主地注意到它;另一种是由于想找到具有某些特点的物体,我们自主地注意到它。
视觉变换器 Vision Transformer (ViT)
图神经网络 Graph Neural Network
GNN 一开始被用于解决图上的深度学习问题(比如社交网络,节点是用户,边表示用户间的关联性)。在计算机视觉对GNN的应用中,我们将每个像素点(或每个像素块patch)视作一个节点,连边则由节点之间的相似度(距离)决定,比如对于两个节点各自的特征向量,计算其余弦相似度决定边的连接(有无、方向、权值等)。每次更新的时候更新节点的权值,由其原有权值和邻居决定。
变换器 Transformer
变换器一开始被应用于语言模型上。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号