NVIDIA CUDA 高性能计算笔记(一)cuda编程简介及矩阵赋值案例
NVIDIA CUDA 高性能计算笔记(一)
CUDA (Compute Unified Device Architecture)是NIVIDIA 推出的通用并行计算平台,支持C,C++,Python等语言,实现CPU和GPU协同计算。其架构采用Grid-Blocks-Threads线程层次结构和SIMT并行模式,在给出CUDA的编程实例之前,需要给出模型的基础知识做个简单的介绍。

1.1CUDA编程模型简介
CUDA编程模型是一个异构模型,需要GPU和CPU协同工作。在CUDA架构中,我们用host端指代CPU及其内存的,用device指代GPU及其内存。CUDA程序中即包含Host程序,又包含device程序,它们分别在CPU与GPU上运行。同时,host与device之间进行通信,这样它们之间可以进行数据拷贝。典型的CUDA程序的执行的程序的流程为:
- 分配host内存,并进行数据初始化;
- 分配device内存(显存、共享内存),并从host端将数据拷贝到device端;
- 调用CUDA的核函数在device函数上完成指定的运算;
- 将device上的运算结果拷贝到host上;
- 释放device和host上分配的内存。

由于CUDA编程模型实际上是异构编程模型,所以需要区分host和device上的代码,在CUDA中是通过函数类型限定词区别开host和device上的函数,主要的三个函数类型限定词如下:
__global__: 在device端上执行,从host中调用(一些特定的GPU也可以从device上调用),返回类型必须为void, 不支持可变参数,不能成为类成员函数。注意__global__定义的kernel是异步的,这意味着host端不会等待kernel执行完就执行下一步;__device__: 在device端上执行,但仅可以从device中调用,不可以和__global__同时用;__host__: 在host上执行,仅可以从host中调用,一般省略不写,不可以和__global__同时用,但可以和__device__,此时函数会在device和host都编译。
上面的流程中最重要的一个过程是调用CUDA的核函数来执行并行计算,kernel是CUDA中的一个重要的概念,kernel是在device上线程中并行执行的函数,在调用时需要用 <<<grid,block>>> 来指定kernel要执行的线程数量,在CUDA中,每个线程都要执行核函数,并且每个线程会分配一个唯一的\(thread\space ID\) ,这个\(ID\) 值可以通过核函数的内置变量 thread Idx 来获得。
要深刻理解\(kernel\),必须要对\(kernel\) 的线程层次结构有一个清晰的认识。首先,\(GPU\)上很多并形化的轻量级线程。\(kernel\) 在device上执行时实际上是启动很多线程,一个\(kernel\) 所启动的所有线程称为网格\(grid\) ,同一个网格的线程共享相同的全局内存空间,grid是线程结构的第一个层次,而网格又可以分为很多线程块(block),一个线程块里面包含很多线程,这是第二个层次。 为了编程方便,\(grid\) 和\(block\) 都是定义为 dim3 类型的变量,dim3 可以看成是包含三个无符号整数\((x,y,z)\) 成员的结构体变量,在定义时,缺失值初始化为1。因此,grid和block可以灵活地定义为1-dim,2-dim以及3-dim的结构,对于,\(knernel\)在定义调用时也必须通过执行配置 <<<grid,block>>>来指定kernel所使用的线程数及结构。
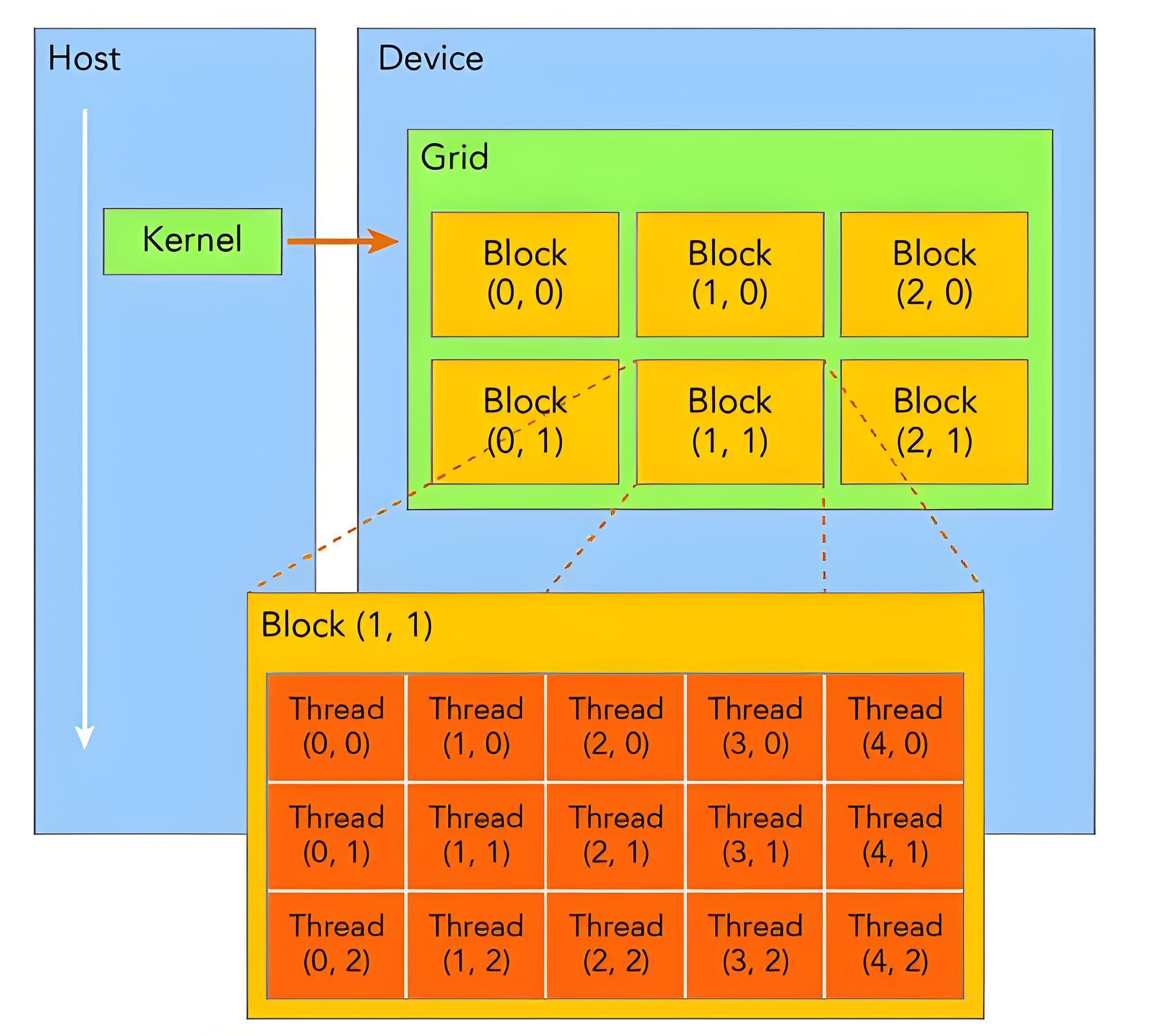
所以,为了方便编程,CUDA中使用了 dim3 类型(dim3 是基于unit3定义的矢量类型,相当于由3个 unsigned int类型组成的结构体)的内建变量 threadIdx 和 blockIdx。这样,就可以使用一维、二维或三维的索引来标识线程,构成 一维、二维或三维线程块。使得线程组织形式对各种域(向量、矩阵,或者高维张量)中数据的划分变得直观、自然。
- 对于一维的block,线程的\(threadID\)就是\(threadId.x\);
- 对于大小为\((Dx,Dy)\)的二维线程块block,线程的\(threadID\) 是 \((threadIdx.x+threadIdx.x\times{Dx})\);
- 对于大小为\((Dx,Dy,Dz)\)的三维线程块block, 线程的\(threadID\)是(\(threadIdx.x+threadIdx.y\times{Dx}+threadIdx.z\times{Dx}\times{Dy}\));
另外,线程还有内置变量gridDim,用于获取网格块各个维度的大小。
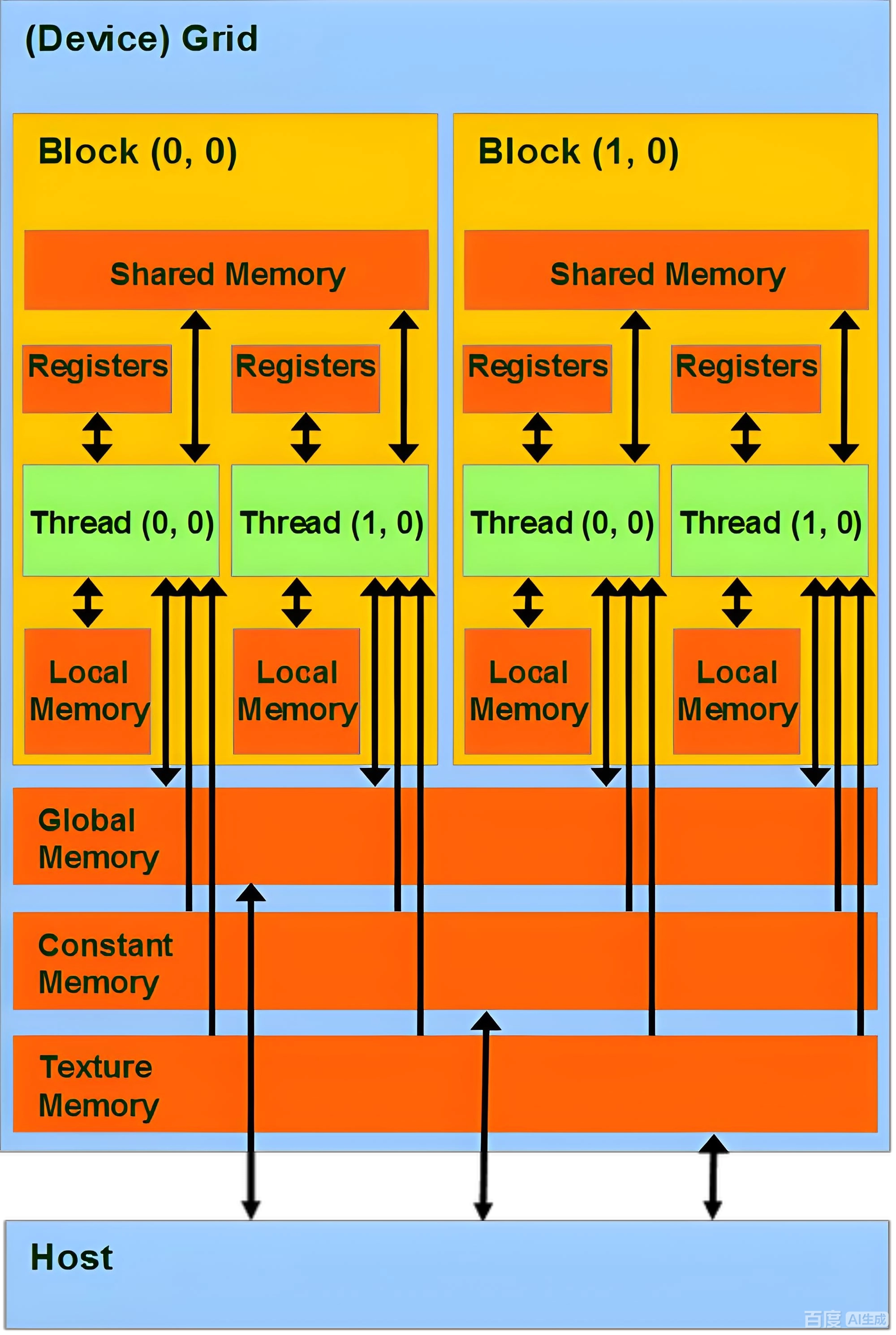
此外,这里简单介绍一下CUDA的内存模块,如图所示。可以看到,每个线程有自己的私有本地内存(\(Local Memory\)), 而每个线程块有包含共享内存(\(Shared \space Memory\))。还可以访问一些只读内存块:常用内存(\(Constant \space Memory\))和纹理内存 (\(Texture \space Memory\))。内存结构涉及到程序优化,这里就过多讨论。
还有重要一点,你需要对\(GPU\)的硬件实现有一个基本的认识。上面说到了\(kernel\)的线程组织层次,那么一个\(kernel\) 实际上会启动很多线程,这些线程是逻辑上是并行的,但是在物理层也是无法却并不一定。这其实和CPU的多线程有类似之处,多线程如果没有多核支持,在物理层也无法实现并行的。但是好在\(GPU\) 存在很多CUDA核心,充分利用CUDA核心可以充分发挥GPU的并行计算能力。GPU硬件的一个核心组件是SM,前面已经说过,SM是Streaming Multiprocessor,SM的核心组件包括的CUDA核心、共享内存、寄存器等,SM可以并发的执行上,一个线程块只能在一个SM上被调度。SM一般可以调度多个线程块,这要看SM本身的能力。那么有可能一个kernel的各个线程块被分配多个SM,所以grid只是逻辑层,而SM才是执行的物理层。SM采用的是SIMT(Single-Instruction, Multiple-Thread,单指令多线程)架构,基本的执行单元是线程束(warps),线程束包含32个线程,这些线程同时执行相同的指令,但是每个线程都包含自己的指令地址计数器和寄存器状态,也有自己独立的执行路径。所以尽管线程束中的线程同时从同一程序地址执行,但是可能具有不同的行为,比如遇到了分支结构,一些线程可能进入这个分支,但是另外一些有可能不执行,它们只能死等,因为GPU规定线程束中所有线程在同一周期执行相同的指令,线程束分化会导致性能下降。当线程块被划分到某个SM上时,它将进一步划分为多个线程束,因为这才是SM的基本执行单元,但是一个SM同时并发的线程束数是有限的。这是因为资源限制,SM要为每个线程块分配共享内存,而也要为每个线程束中的线程分配独立的寄存器。所以SM的配置会影响其所支持的线程块和线程束并发数量。总之,就是网格和线程块只是逻辑划分,一个kernel的所有线程其实在物理层是不一定同时并发的。所以kernel的grid和block的配置不同,性能会出现差异,这点是要特别注意的。还有,由于SM的基本执行单元是包含32个线程的线程束,所以block大小一般要设置为32的倍数。
| 内存类型: | 内存作用: |
|---|---|
| 全局内存(Global Memory) | 容量最大(通常数GB),所有线程可访问,但延迟高(400-800周期) |
| 共享内存(shared Memory) | 片上内存,速度比全局内存快100倍,但容量有限(每SM通常16-64KB) |
| 寄存器(Registers) | 最快的存储,每个线程私有 |
| 常量内存(Constant Memory) | 只读缓存,适合广播数据 |
| 纹理内存(Texture Memory) | 专为图形处理优化的特殊缓存 |
内存访问特性比较:
| 内存类型 | 物理位置 | 作用域 | 带宽、速度 | 使用场景 | 显式控制关键字 |
|---|---|---|---|---|---|
| 寄存器 | GPU芯片寄存器 | 线程私有 | 最高(1周期) | 高频访问的私有变量(如循环计数器) | 自动分配(局部变量) |
| 共享内存 | GPU芯片上的SM处理器 | 线程块共享 | 高(1-32周期) | 线程协作(如规约运算、矩阵分块) | __share__ |
| 本地内存 | 实际在全局内存中内存 | 线程私有 | 中低(\(\approx\)全局内存) | 大数组或寄存器不足时的溢出变量 | 编译器自动分配 |
| 全局内存 | GPU设备显存 | 所有线程+主机 | 中(400~800周期) | 大规模数据存储,需要频繁访问时需合并访问优化 | cudaMalloc分配 |
| 常量内存 | GPU芯片上的缓存 | 所有线程只读 | 中(缓存加速) | 需要广播给所有线程的至多 | __constant__ |
| 纹理内存 | GPU专用缓存 | 所有线程 | 中 (优化访存) | 图形处理、具有空间局部性的非对齐访问 | 纹理API绑定 |
| 主机内存 | CPU内存 | 主机+设备(需要拷贝) | 最低(PCLe瓶颈) | CPU-GPU数据传输的中间存储 | malloc、cudaHostAlloc |
下面我将详细地介绍CUDA中各种内存管理函数的功能、参数和使用方法。
CUDA是一种用于异构并行计算的编程模型,经常需要在主机端(host)和设备端(Device)之间进行数据传输。这是因为CUDA核函数传入的必须是指向其中处理GPU显存的三个关键的API:cudaMalloc,cudaMemcpy和 cudaFree。
cudaMalloc:
| 其接口API形式: | cudaError_t cudaMalloc(void ** devPtr,size_t size ) |
|---|---|
| 函数功能: | 在设备上分配线性内存size字节,并通过指针返回分配的内存devPtr。分配的内存对应任何类型的变量。记忆没有被清除。失败时返回 cudaErrorMemoryAllocation。 |
| 参数: | devPtr 设备内存分配指针;size :分配的字节数 |
| 返回值: | cudaSuccess , cudaErrorMemoryAllocation |
注意事项:
分配的内存
-
cudaMemcpy:其接口形式: cudaError_t cudaMemcpy(void * dist, const void * src,size_t count,CudaMemcpyKind kind) 函数功能: 将指向的内存区域的字节复制到指向的存储区域 参数: dist-目的存储地址;src -源内存地址;count-复制内存的字节数; kind-传输类型 返回值: cudaSuccess,cudaErrorInvalidValue,cudaErrorInvalidDevicePointer,cudaErrorInvalidMemcpyDirection -
cudaFree:其接口形式: cudaError_t cudaFree(void * devPtr) 函数功能: 释放由 指向的内存空间,该空间必须是之前调用cudaMalloc()或cudaMallocPitch()时返回过的。否则,或者如果cudaFree()之前已被调用过,则返回错误。如果 为 0,则不执行作。cudaFree() 在失败时返回cudaErrorInvalidDevicePointer。 参数: devPtr-设备指针指向内存释放返回值: cudaSuccess,cudaErrorInvalidDevicePointer, cudaErrorInitialization
1.2 CUDA的第一个程序—矩阵赋值(Matrix Assign)
在本节通过一个矩阵赋值(matrix Assign)例子开始真正的CUDA程序实现,本例是在SDK中template程序的基础上修改得到的。\(template\) 是 \(NVIDIA\) 公司提供的CUDA程序模板,也就是CUDA程序最基本的框架。要创建一个CUDA程序,可以把整个template文件复制一份。在一个CUDA程序中,基本的主机端代码主要完成以下的功能:
- 启动CUDA,使用多卡时应该时应该加上设备号,或使用\(cudaSetDevice()\)设备GPU设备;
- 为输入数据分配内存空间;
- 初始化输入数据;
- 为GPU分配内存,用于存放输入数据;
- 将内存中的输入数据拷贝到显存;
- 为GPU分配显存,用于存放输出数据;
- 调用device端的kernel进行计算,将结果写到显存中的对应区域;
- 为CPU分配内存,用于存放GPU传回来的输出数据;
- 将显存中的结果读取到内存;
- 释放内存和显存空间;
- 退出CUDA;
最简单的设备端代码主要完成以下功能:
-
从显存读取数据到GPU片内;
-
对数据进行处理;
-
将处理后的数据写回显存;
其整个工程包含了三:
(1)主程序文件CPU-Host端程序(example1main.cu);
(2)GPU设备端函数的处理函数头文件(example_matrixassign_kernel.cuh);
(3)GPU设备端函数的处理函数文件(example_matrixassign_kernel.cu);
File1:主程序文件CPU-Host端程序(example1main.cu);
#include<stdio.h> //系统头文件
#include<stdlib.h>
#include<string.h>
#include<math.h>
#include"cuda_runtime.h" //cuda项目头文件
#include"device_launch_parameters.h"
#include"example_matrixassign_kernel.cuh" //核函数的数据的头文件
void runTest(int argc, char** argv);
int main(int argc,char** argv){
runTest(argc,argv);
}
void runTest(int argc, char** argv){
unsigned int num_blocks = 4; //定义网格中的线程块数量
unsigned int num_threads= 4; //定义每个线程块中的线程数量
unsigned int mem_size = sizeof(float) * num_blocks * num_threads; //为了数据分配的存储器大小,这里每一个人线程计算一个flaot
//在host端分配内存,h_表示host端,i表示input,o表示output
float* h_idata = nullptr;
float* h_odata = nullptr;
h_idata =(float *)malloc(mem_size);
h_odata = (float*)malloc(mem_size);
if(h_idata != nullptr) {
memset(h_idata, 0, mem_size);
}else{
return;
}
if(h_odata!=nullptr){
memset(h_odata, 0, mem_size);
}else{
return;
}
//在device端分配显存,d_表示device端,i表示input,o表示output
float* d_idata = nullptr;
float* d_odata = nullptr;
cudaError_t cudaStatus; //cuda状态判断
cudaStatus=cudaMalloc((void**)&d_idata, mem_size);
if(cudaStatus != cudaSuccess){
printf("d_idata is cudaMalloc failed!\n");
return;
}
cudaStatus=cudaMalloc((void**)&d_odata, mem_size);
if(cudaStatus!=cudaSuccess){
printf("d_odata is cudaMalloc failed!\n");
return;
}
//初始化内存中的值
for(unsigned int i = 0; i < num_threads * num_blocks;i++){
h_idata[i] =1.0f;
}//end for(unsigned int i = 0; i < num_threads * num_blocks;i++)
//将内存中的输入数据读入设备端显存,这样就完成了主机对设备的数据写入
cudaStatus=cudaMemcpy(d_idata,h_idata,mem_size,cudaMemcpyHostToDevice);
//设置运行参数,即网格的形状和线程块的形状
dim3 grid(num_blocks,1,1);
dim3 block(num_threads,1,1);
// 运行核函数,调用GPU进行运算
testMatrixAssignKernel <<<grid, block>>> (d_idata,d_odata);
//将结果从显存写入内存
cudaStatus = cudaMemcpy(h_odata,d_odata,mem_size,cudaMemcpyDeviceToHost);
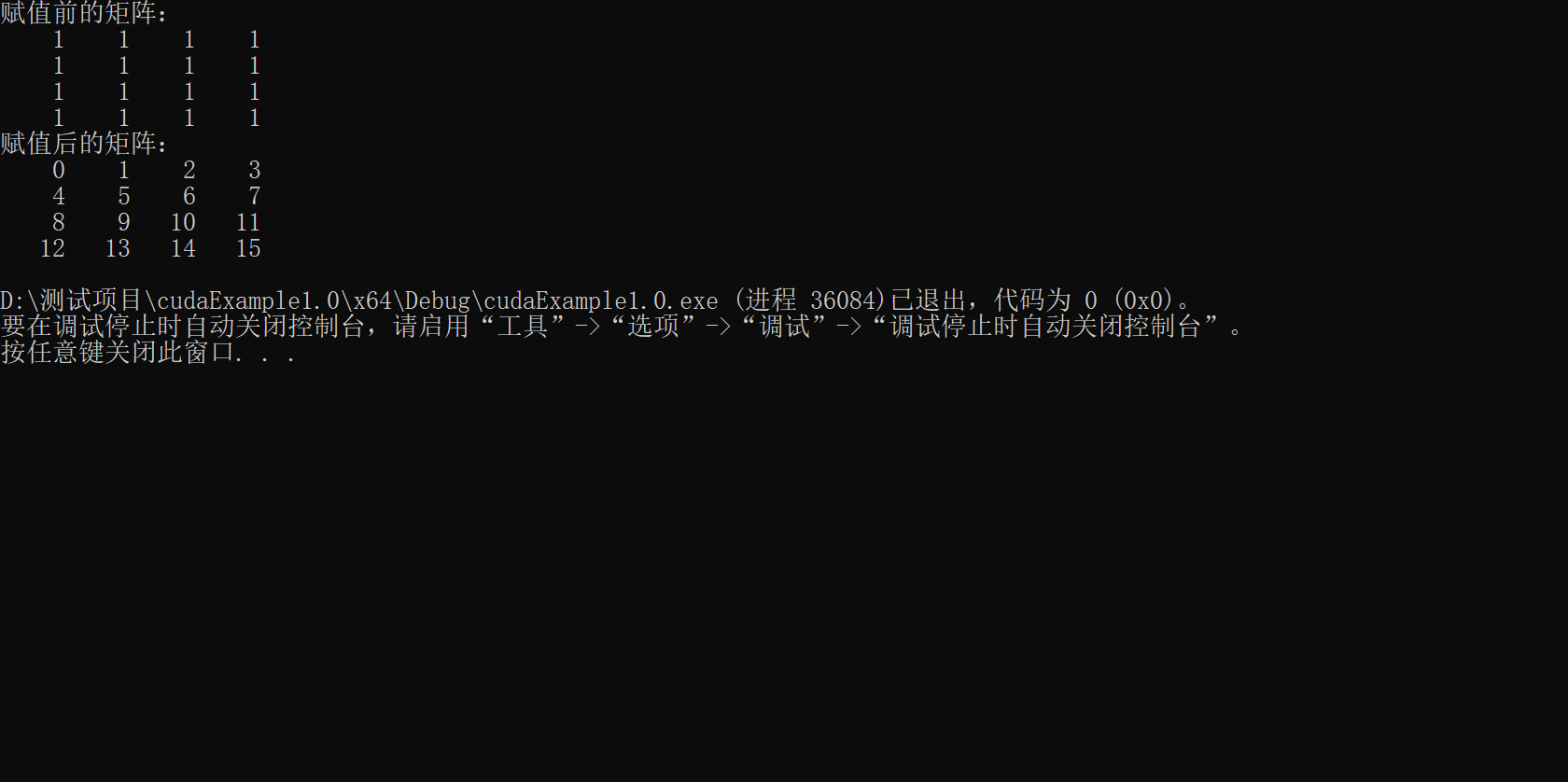
//打印结果
printf("赋值前的矩阵:\n");
for (unsigned int iblock = 0; iblock < num_blocks; iblock++) {
for (unsigned int ithread = 0; ithread < num_threads; ithread++) {
printf("%5.0f", h_idata[iblock * num_threads + ithread]);
}//end for(unsigned int ithread = 0; ithread < num_threads; ithread++)
printf("\n");
}//end for(unsigned int iblock = 0; iblock < num_blocks; iblock++)
printf("赋值后的矩阵:\n");
for(unsigned int iblock = 0; iblock < num_blocks; iblock++){
for(unsigned int ithread = 0; ithread < num_threads; ithread++){
printf("%5.0f",h_odata[iblock*num_threads+ithread]);
}//end for(unsigned int ithread = 0; ithread < num_threads; ithread++)
printf("\n");
}//end for(unsigned int iblock = 0; iblock < num_blocks; iblock++)
//输出存储器指针
free(h_idata);
free(h_odata);
cudaFree(d_idata);
cudaFree(d_odata);
}
从代码中看出,CUDA的主机端代码与C语言非常相似。但也有一部分C语言中没有的语句,下面逐一进行分析。
(1)cudaMalloc(size)在显存global memory上分配大小为size字节的线性空间。需要注意的是,与malloc和free一样,cudaMalloc() 也必须与cudaFree()成对使用,否则无法释放显存空间,运行几次程序以后显卡上就没有显存可供分配,程序也就无法正常运行了。另外,为了杜绝指针指费的情况现象,最好在程序结束前将指针赋空并摧毁。
(2) cudaMemcpy()用于拷贝存储器中的数据,其中第二参数是指向目标的指针,第二个参数是指向源的指针,第三个参数是需要拷贝的字节数,第四个参数是拷贝操作的类型。拷贝操作类型共有三种:
- cudaMemcpyDeviceToHost 将显存中的数据拷贝内存中;
- cudaMemcpyHostToDevice 将内存中的数据拷贝到显存中;
- cudaMemcpyDeviceToDevice将global memory中的数据拷贝到同一个CUDA上下文的global的另一个区域中;
(3)<<<>>>运算符对kernel函数完整的执行参数配置形式是<<<Dg,Db,Ns,S>>>,其中各个参数的含义是:
- 参数Dg用于定义整个grid的维度和尺寸,为dim3类型,但实际上只有前两维可以不为1。
Dim3 Dg(Dg.x,Dg.y,1)中每行有Dg.x个block,每列有Dg.y个block的维度,第三维恒为1。 - 参数Db为dim3类型,用于定义每个block的维度与尺寸。
Dim3 Db(Db.x,Db.y,Db.z)中每行有Db.x个thread,每列Db.y个thread,高为Db.z,可以定义三维尺寸。整个block中共有Db.x*Db.y*Db.z个线程; - 参数Ns是一个可选参数,用于设置每个block的共享内存shared memory以外,最多能够动态分配的shared memory大小,单位为Byte。
- 参数\(s\)是一个cudaStream_t类型的可选参数,初始值为0。在本案例中没有用到Stream的相关内容因此这个参数不填,默认为0号流。
File2:主程序文件CPU-Host端程序(example1main.cu);
#pragma once
#ifndef EXAMPLE_MATRIXASSIGN_KERNEL_H
#define EXAMPLE_MATRIXASSIGN_KERNEL_H
#include<stdio.h>
#include"cuda_runtime.h"
__global__ void testMatrixAssignKernel(float* data_input, float* data_output);
#endif // !_EXAMPLE_MATRIXASSIGN_KERNEL_H_
File2:主程序文件CPU-Host端程序(example1main.cu);
__global__ void testMatrixAssignKernel(float *data_input,float *data_output){
//shared memory,extern表示大小由host端的Ns参数确定
extern __shared__ float sdata[];
const unsigned int bid = blockIdx.x; //线程所在的block的索引号
const unsigned int tid_in_block = threadIdx.x; //线程在block中的位置
const unsigned int tid_in_grid = blockDim.x * blockIdx.x + threadIdx.x;
//按行划分任务时,线程在整个grid中的位置
// 将数据从global memory读入shared memory
sdata[tid_in_block] = data_input[tid_in_grid];
//读入数据后进行一次同步,保证计算时所有数据均已到位
__syncthreads();
// 计算
sdata[tid_in_block] = (float)tid_in_grid;
// sdata[tid_in_block] *= (float)tid_in_block;
// sdata[tid_in_block] *= (float)tid_in_grid;
//进行同步,确保要写入的数据已经被更新
__syncthreads();
// 将shared memory中的数据写到global memory
data_output[tid_in_grid] = sdata[tid_in_block];
}
由上可知,最简单的__gloabal__程序由以下的过程组成:
- 分配\(shared \space memory\);
- 将\(global\space memory\) 中的数据读入\(shared \space memory\);
- 将进行计算,将结果写到\(shared \space memory\);
- 将\(shared\)中的结果写到\(global \space memory\) ;
进行一次GPU计算,要在多种存储器进行几次数据传输,要消耗相当多的时间。这导致了较大的延迟,这导致使\(GPU\) 不适合处理一些实时性要求很高的应用。不同存储器间的数据传输速率和使用方法有很大差异,开发人员需要根据硬件的特点来设计算法,以优化存储器访问。在理想情况下,在所有的存储器传输进行的同时,GPU的各个核心也始终在进行计算,这样就能够很好的隐藏各种访问延迟。CUDA 并不是一种完全硬件透明的语言,程序员需要根据硬件特征将任务进行合理的分解,在编程时对数据传输和寄存器访问进行优化。
__global__前缀表示这一段代码是cuda GPU端内核函数。内核函数运行在设备上,其返回类型必须为void。__global__函数中是每一个线程要执行的语句,但由于\(shared\space memory\)和同步的存在,在最好将__global__函数理解为对每一个block的行为的描述。
在这一端内核函数中,首先定义了\(shared \space memory\) 中的变量;然后根据内建变量定义每一个block和thread的索引,对任务进行划分;最后,每一个线程执行了相同的求和运算,但处理数据不同,由线程的索引决定的。程序员在编写__global__函数之前,要先对任务进行划分,设计各个block的工作流程后,做到成竹在胸。
由于CUDA采用了两层并行,因此本例在划分任务时,每个thread在grid中的索引\(tid\_in\_grid\) 是由thread所在block内编号tid计算得来的。计算出每个线程的索引后,就可以根据索引处理线程中不同的数据,请读者好好体会这一点。
extern __shared__ float sdata[] 在shared memory中为数组data动态分配了空间。extern 在设备端和主机端有不同的含义:__device__和__global__ 函数中表示动态分配,而在主机端函数中表示外部变量。如果要静态分配一块 shared memory,那么在__shared__之前就不加extern,还必须在[]中写上要分配的字节数。动态分配的shared memory大小,是<<<>>>的执行参数中第三个参数规定的大小。关于shared memory大小。
CUDA定义了一些内建变量如下:
- gridDim: 网格的维度的变量,dim3类型
- blockIdx: 块的索引变量,unit3类型
- blockDim:块的维度变量,dim3类型
- threadIdx:块内的线程索引变量,unit3类型
- warpSize:线程中的warp大小,int类型
其输出结果:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号