
acfly edu探索
遥控器
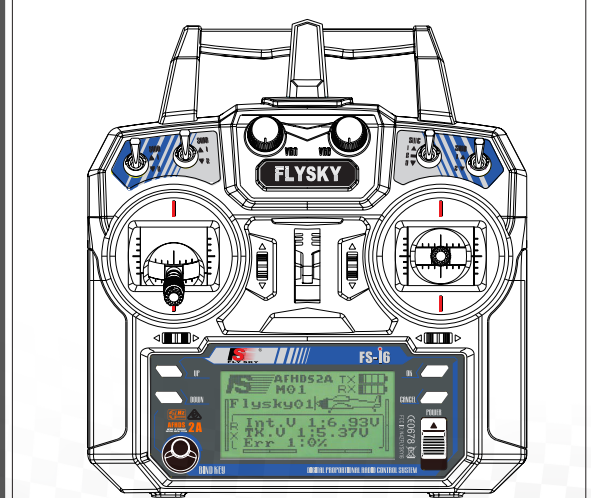
FS-i6遥控器说明书
链接:https://pan.baidu.com/s/1LHeysqdEnGSMK30Tdvvknw?pwd=ymer
提取码:ymer
遥控器主要调整
接收机与遥控器对频
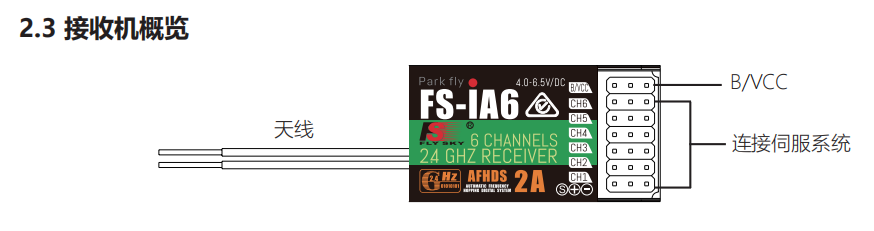
- 接收机的B/VCC口用母对母的杜邦线短接
- 飞机上电
- 遥控器按着左下角的BIND KEY开机进入对频
遥控器的Display查看打杆量
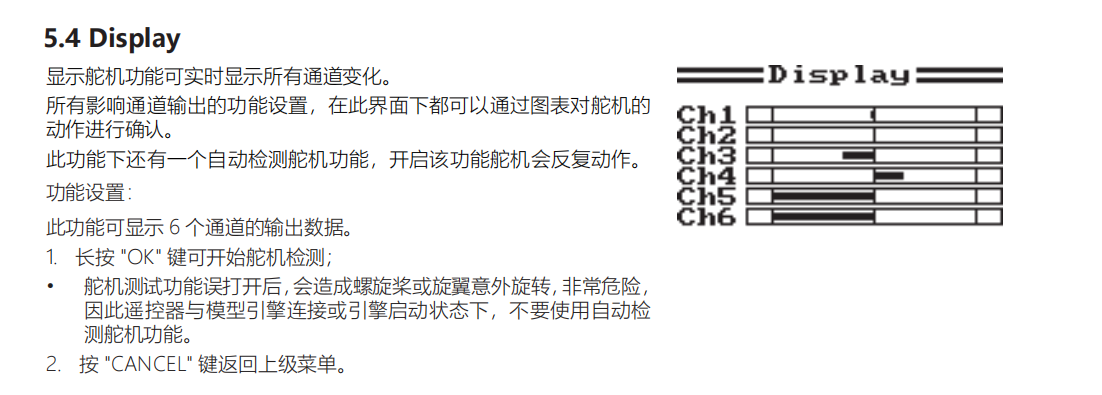
!!!进入Display后长按cancel键是自主检测舵机功能,飞机上了螺旋桨不要使用
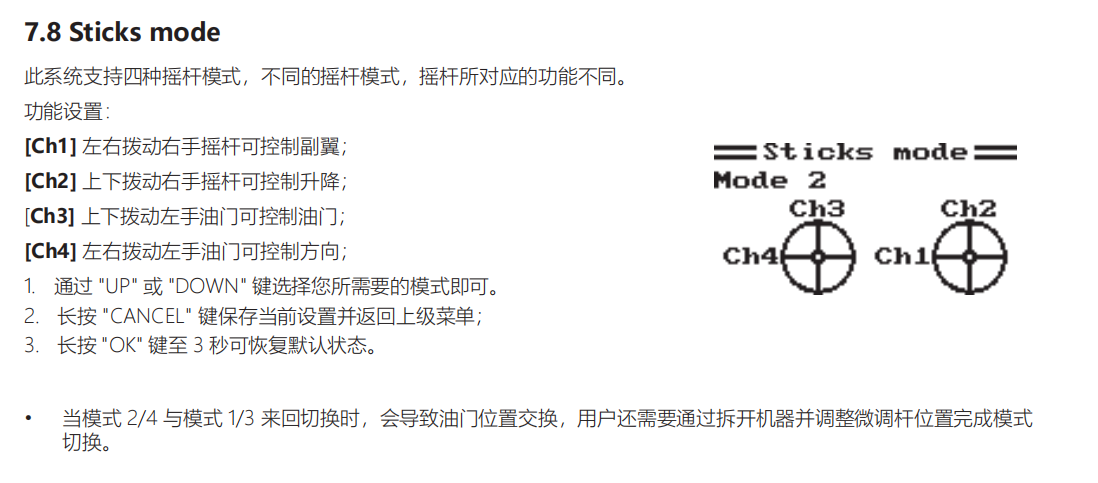
遥控器的Sticks mode调整遥杆对应的操作(油门、偏航、横滚、俯仰)
飞机的调试
Q:若上电以后电机出现小幅间断转动并发出滴、滴、滴的声音是是什么问题?
A:代码烧录失败,需重新烧录代码
Q:初始化遥控器后连不上飞机/飞机的led屏上显示RC为X
A:重新对码接收机;检查PPM模式是否开启
代码二次开发
| 单词 | 意义 |
|---|---|
| throttle | 油门(上下飞) |
| yaw | 偏航(自转)+左-右 |
| pitch | 俯仰(前后飞)+俯-仰 |
| roll | 横滚(左右飞)+右-左 |
| //假设人站在飞机的正后方相对于人的方位 |
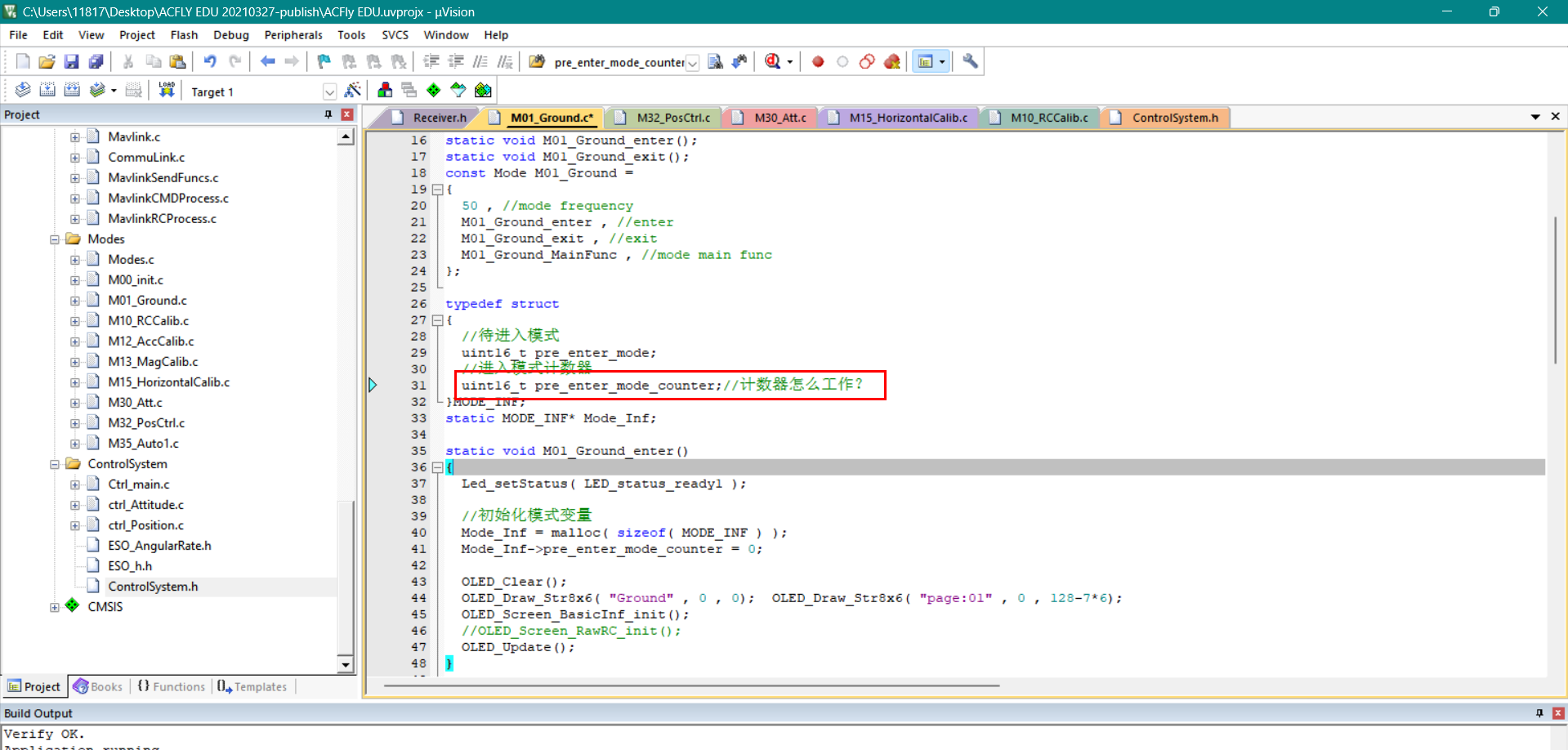
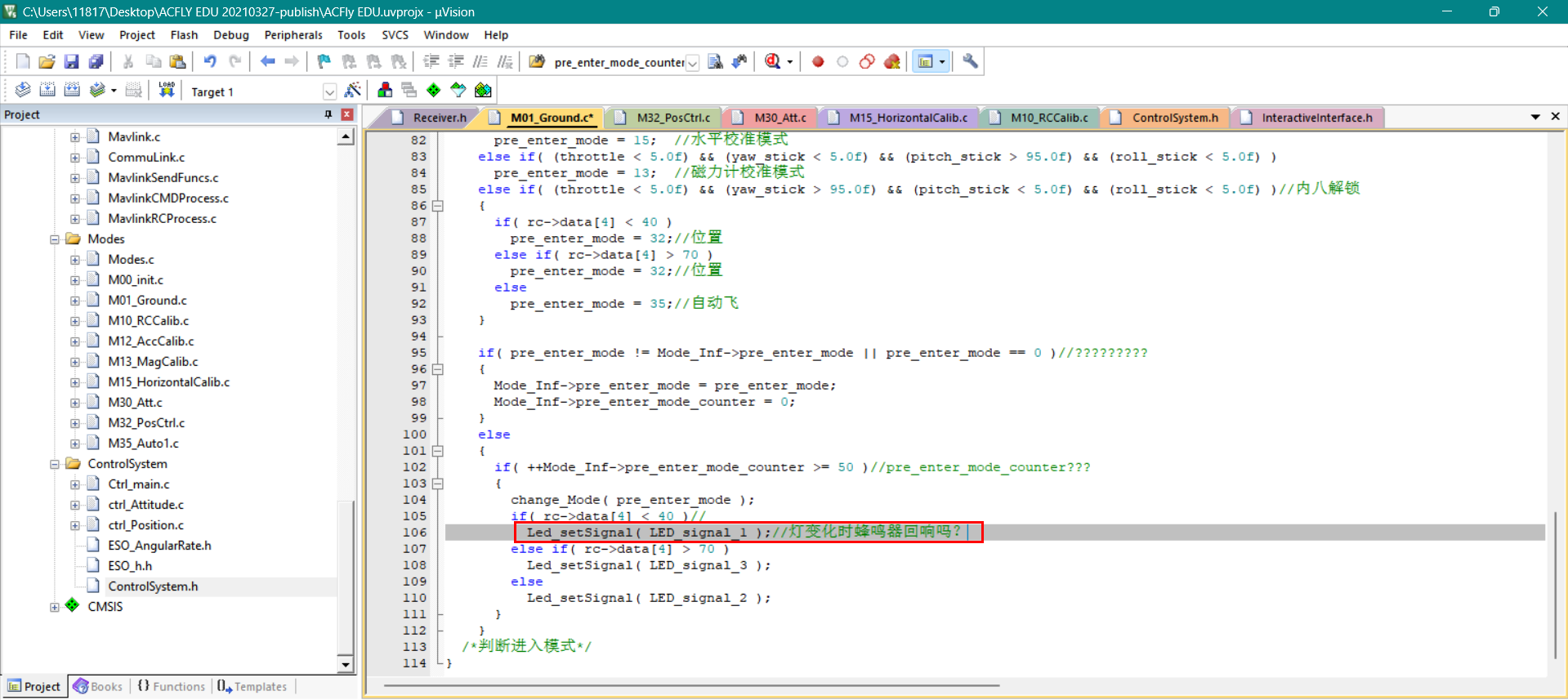
模式切换(Modes文件夹的M01源文件)
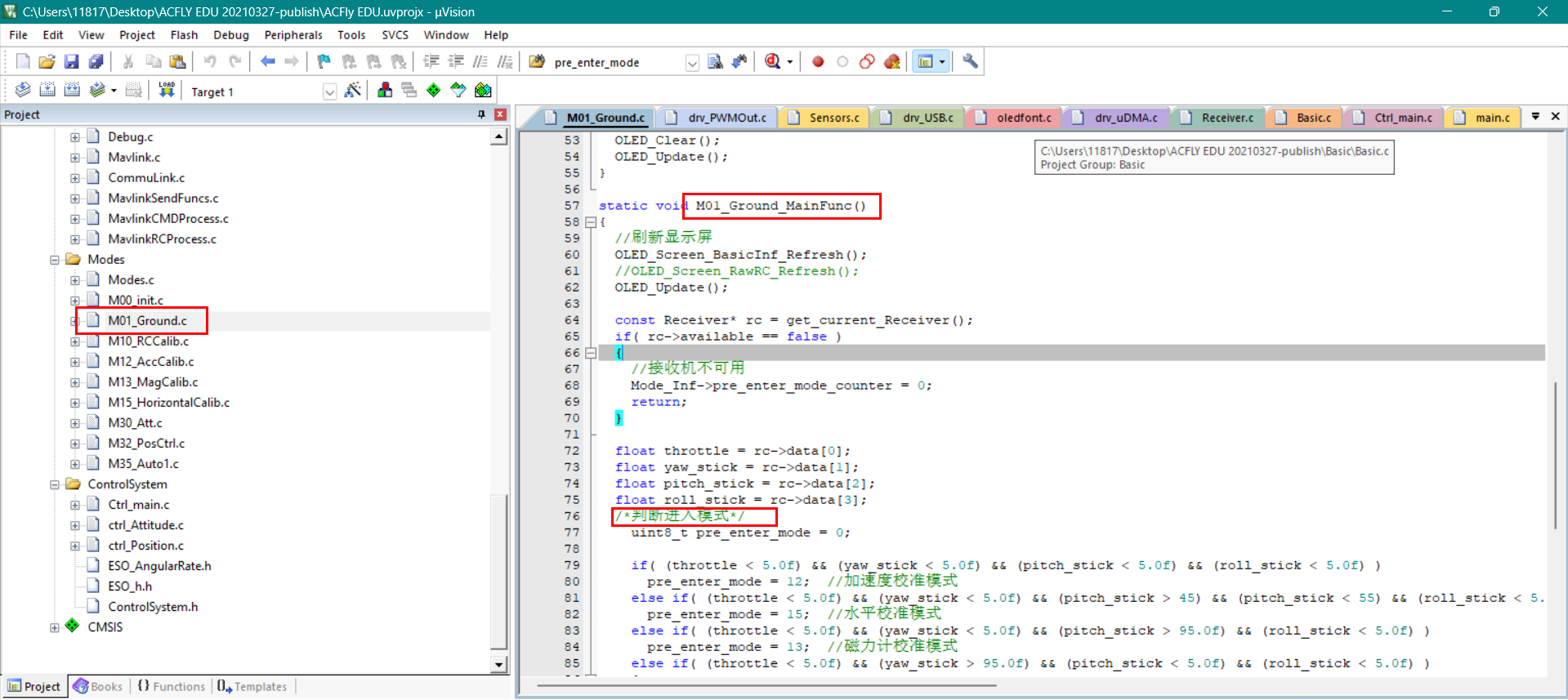
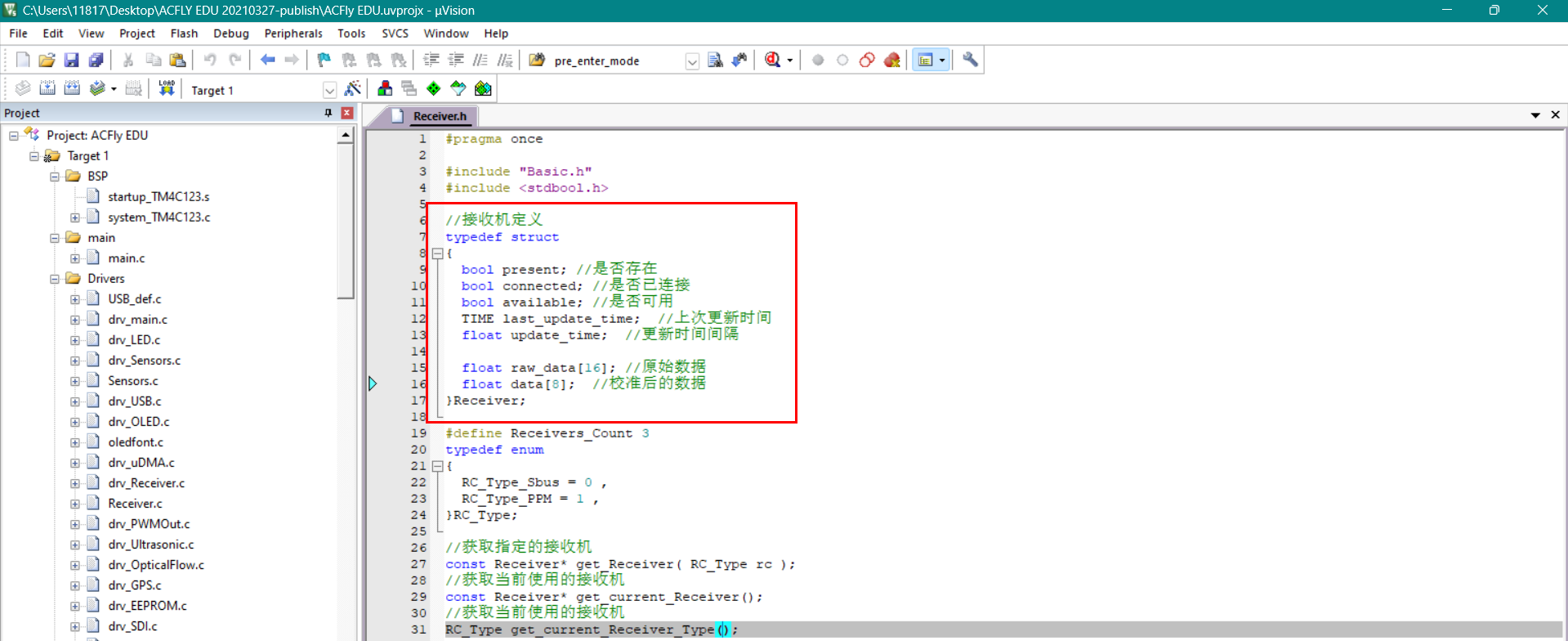
遥控器数据与接收机
打杆的杆量在代码中默认为0-100,若是要取中间值,最好使用stick >45 && stick <55
Q:
飞控使用的坐标系

坐标系概述
bodyheading坐标系:x为机头朝向(与地面平行),y为朝向机头左方(与地面平行),z为上方
Q: 位置和姿态有什么区别?
A:
- Position:定高定位
- Attitude:只靠气压计定高,会随风乱飘
正东方向为YAW = 0
正北方向为YAW = -90
正南方向为YAW = 90
正西方向为YAW = 180
添加步进电机
- 遥控器打杆
- 32与飞控通信
- 32与步进电机通信
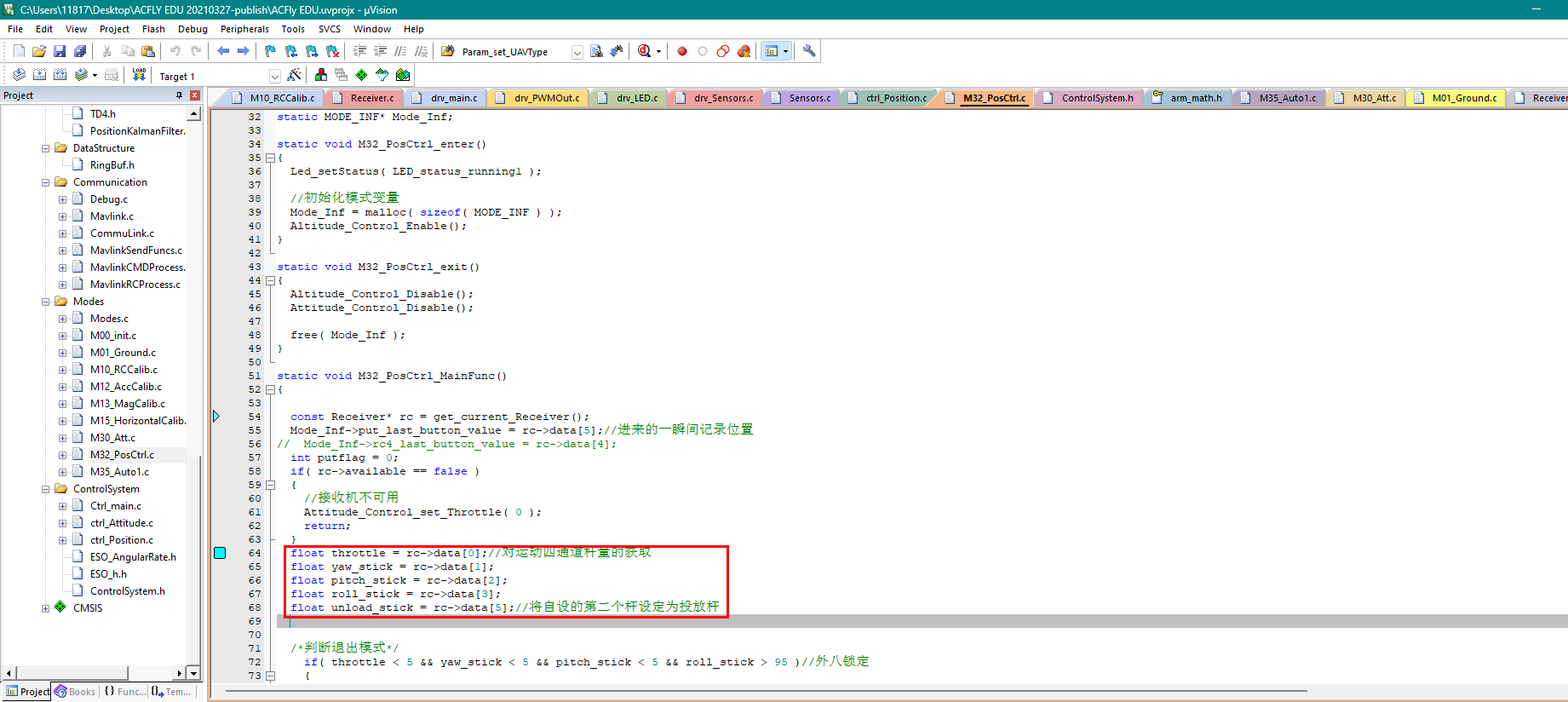
遥控器打杆
将进入Position/Attitude模式后的第二个自设杆设置为投放杆,杆量增大投放,减小舵机回转
32与飞控通信
将飞控的Uart2与stm32的rx、tx口相连,双方串口初始化
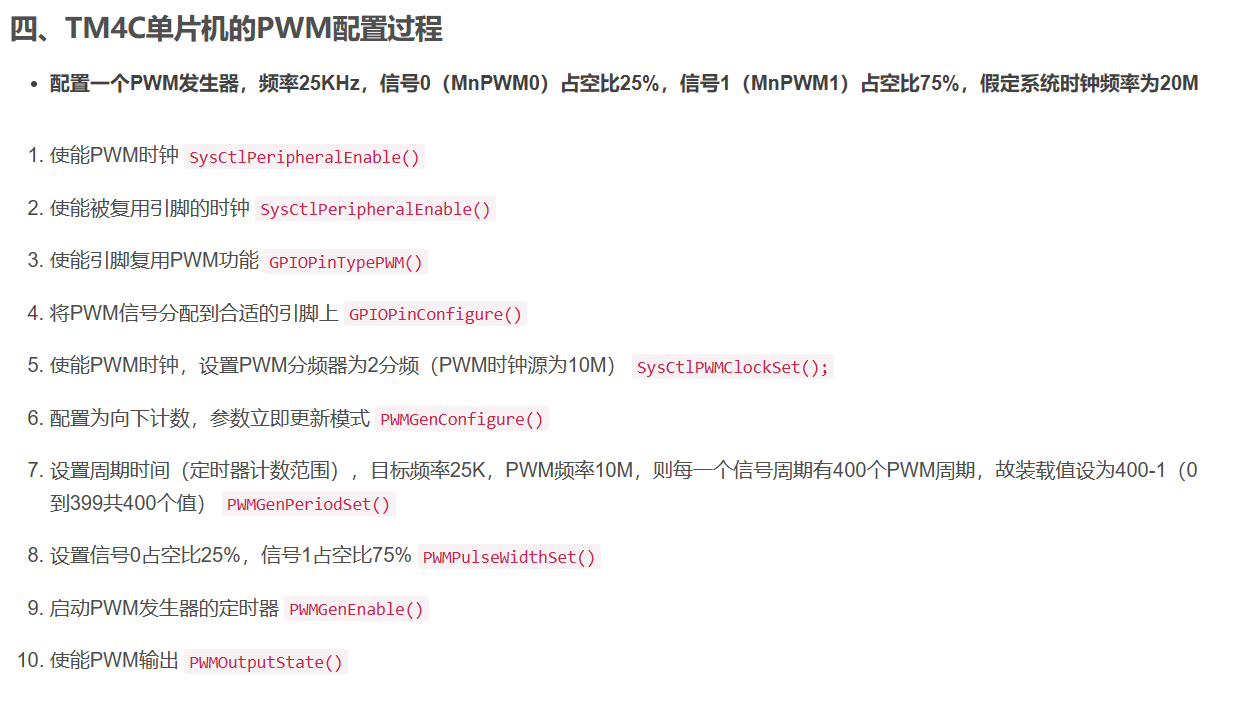
蜂鸣器
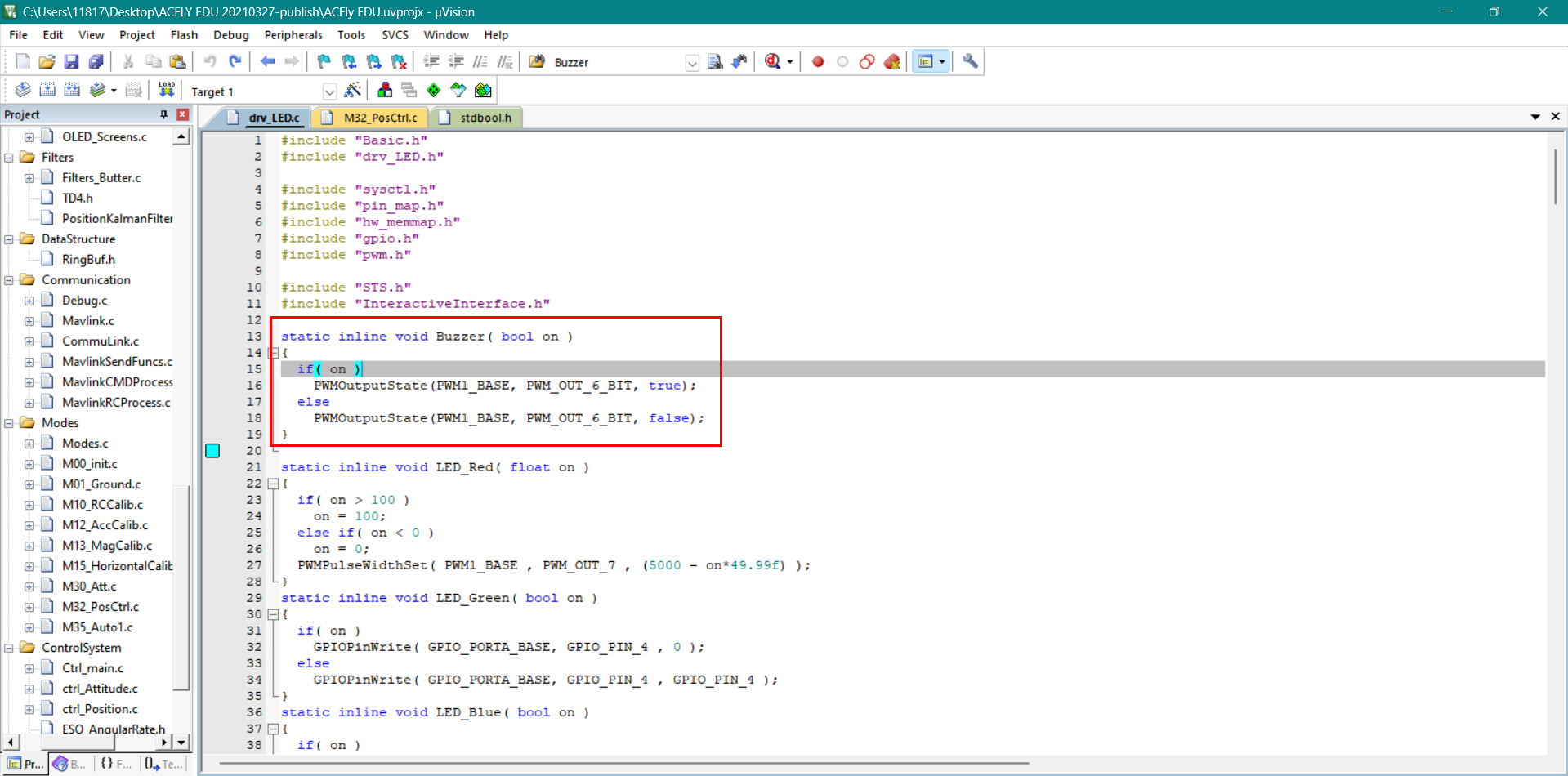
PWMOutputState(PWM1_BASE, PWM_OUT_6_BIT, true);
几种模式及控制
- Altitude高度控制
- Attitude姿态(气压计定位)
- Position水平控制

 浙公网安备 33010602011771号
浙公网安备 33010602011771号