
强化学习算法解析:PPO(Proximal Policy Optimization)
PPO(近端策略优化)是OpenAI于2017年提出的一种策略梯度类算法,以其高效性、稳定性和易实现性成为强化学习领域的主流算法。以下从核心原理、数学推导、代码实现到应用场景进行系统解析。
一、PPO 的核心设计思想
-
问题背景
传统策略梯度方法(如TRPO)存在两大痛点:-
更新步长敏感:步长过大易导致策略崩溃,步长过小则收敛缓慢;
-
样本利用率低:需大量环境交互数据。
-
-
PPO 的解决方案
-
Clipped Surrogate Objective:通过限制策略更新的幅度,确保新策略与旧策略的差异在可控范围内;
-
重要性采样(Importance Sampling):复用旧策略采集的数据,提升样本效率;
-
自适应惩罚项:替代TRPO的复杂约束优化,降低计算成本。
-
二、数学原理与目标函数
-
策略梯度基础
策略梯度目标函数为:
其中 𝐴(𝑠,𝑎)A(s,a) 为优势函数,衡量动作的相对价值。
PPO 的目标函数引入重要性采样比![]() ,构建 clipped 目标函数:
,构建 clipped 目标函数:

-
Clip 机制:限制 𝑟𝑡(𝜃)rt(θ) 在 [1−𝜖,1+𝜖][1−ϵ,1+ϵ] 区间(通常 𝜖=0.2ϵ=0.2),防止策略突变;
-
双重目标:取最小值确保优化方向保守,避免过度偏离旧策略。
-
优势估计技术
常用 GAE(Generalized Advantage Estimation) 计算优势值:
其中
 ,λ 控制偏差-方差权衡。
,λ 控制偏差-方差权衡。
三、算法流程与伪代码
四、关键超参数与调优策略

五、应用场景与性能对比
-
典型应用
-
游戏AI:OpenAI Five(Dota 2)、AlphaStar(星际争霸Ⅱ)
-
机器人控制:波士顿动力 Atlas 机器人步态优化
-
自然语言处理:ChatGPT 的策略优化阶段
-
-
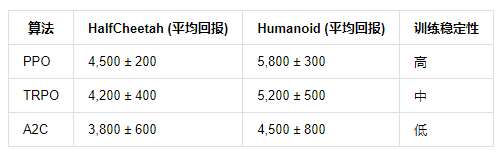
基准测试对比
在 MuJoCo 连续控制任务中,PPO 的性能显著优于传统算法:
六、PyTorch 实现核心代码
七、局限性与改进方向
-
固有缺陷
-
局部最优陷阱:Clip机制可能限制探索能力;
-
高维动作空间:对连续控制任务需精细调整熵系数。
-
-
前沿改进
-
PPO-Adaptive:动态调整Clip范围 ε;
-
POP(Phasic Policy Gradient):解耦策略与价值函数更新频率;
-
结合元学习:实现跨任务快速适应(如 Meta-PPO)。
-
总结
PPO 通过创新的目标函数设计和工程优化,在保持策略梯度方法理论优势的同时大幅提升实用价值。其核心在于平衡样本效率、训练稳定性与实现复杂度,成为工业级强化学习应用的首选算法。未来,与离线强化学习、多智能体系统的结合将拓展其应用边界。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号