2025.8.17学习日记
相机与图像
相机模型
最简单的相机模型为针孔相机模型,下面将详细介绍
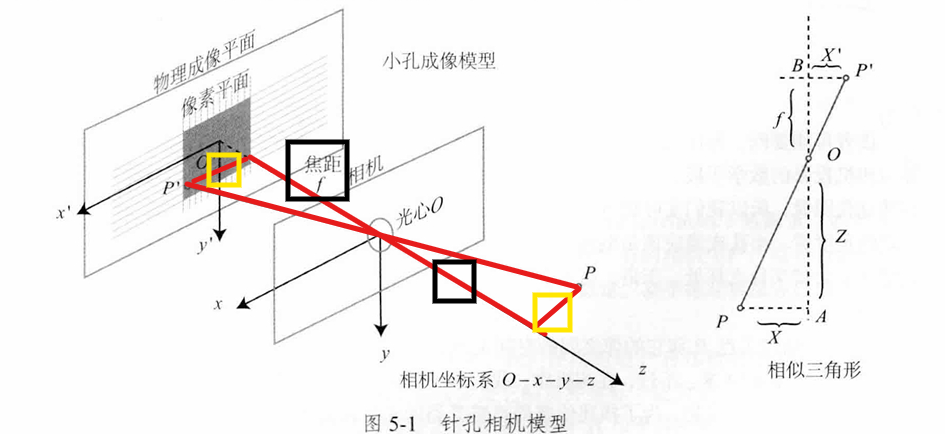
针孔相机模型/单目相机模型
由小孔成像原理,针孔相机模型可以建模为如下表示,使用相似三角形计算

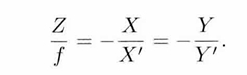
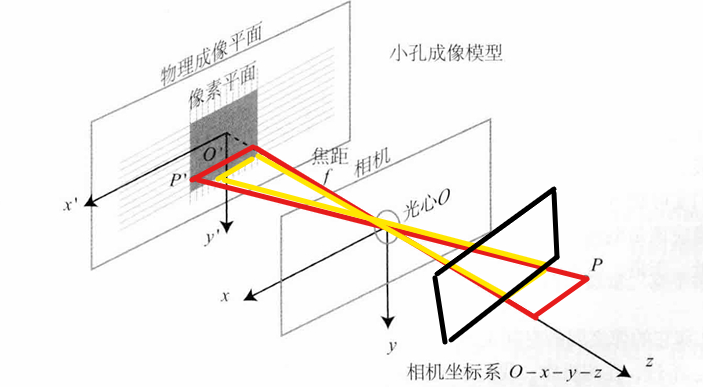
- 对称成像平面
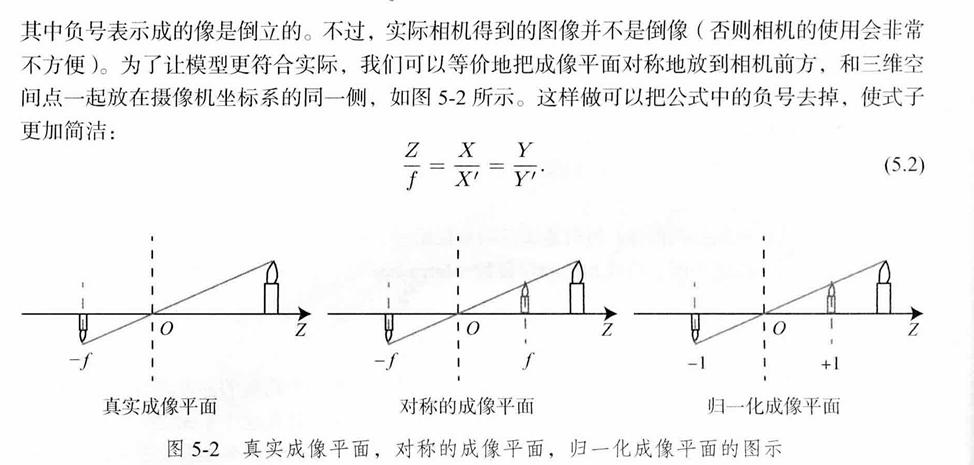
以下是成像平面等价地放到相机前方,让模型更加符合实际,其实就是金字塔型的三棱锥
- 像素平面
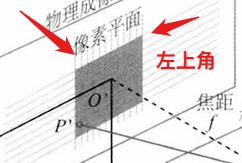
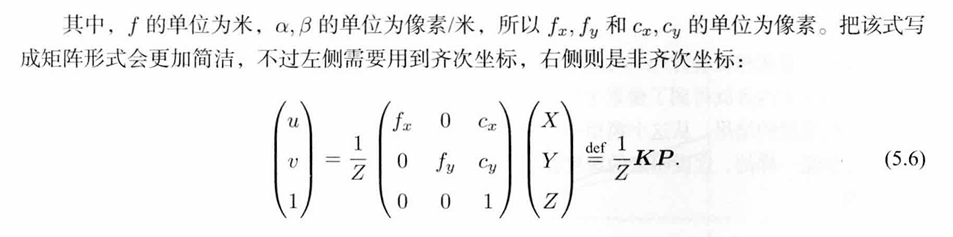
通过对成像平面的缩放和平移可以得到像素平面,表达式如下:
- 归一化成像平面(NDC)
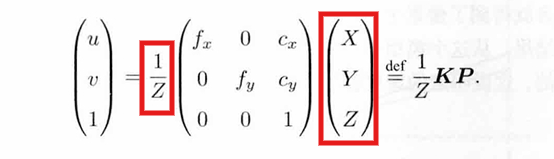
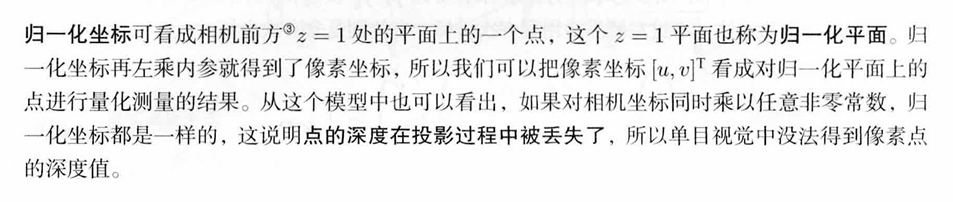
如果将框选两项相结合,可以得到一个归一化坐标[X/Z,Y/Z,1]那么就相当于像素坐标等于归一化坐标就行一个量化测量
【注】:相机成像其实并不需要知道内外参矩阵等参数,但是需要从成像中反推出3D物体时,如果没有深度信息的话,其实无法得到3D物体的准确坐标,也就是说投影时的深度信息被丢失了

 浙公网安备 33010602011771号
浙公网安备 33010602011771号