2025.8.16学习日记
三维空间的刚体运动
旋转矩阵
坐标系之间的欧式变换
这一部分的前提假设是,对于同一向量p,在不同坐标系中,有不同的表示。通过等式p=(e1,e2,e3)(a1,a2,a3)T=(e1',e2',e3')(a1',a2',a3')T找到不同坐标系之间同一个点的表示,最后表示为如下:
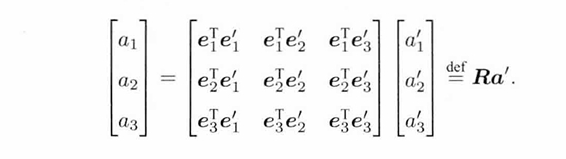
【注】:矩阵R有两组基互相做内积得到,向量和它的加减法,内外积这些运算不用通过坐标系也能够得到。例如在有坐标时,内积可以通过分量乘积之和得到,在没有坐标时,也可以通过长度和夹角计算得到。所以说内积结果与坐标选择无关
从坐标系的欧式变换应用到向量的旋转变换
根据旋转矩阵的定义:行列式为1的正交矩阵,可以验证这个欧式变换确实是一个旋转变换R,可以通过如下公式计算其夹角和旋转轴
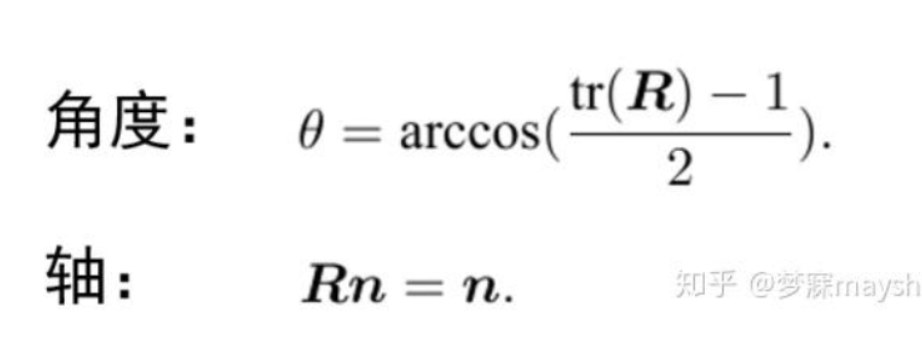
【注】:这里有一种主被动的理解方式,待旋转点主动转θ后得到的坐标,等于待旋转点不动,坐标系转动-θ得到的坐标;缩短两人之间的距离,要么一个人前进x米,要么另一个人后退x米
约定写法

其中R12需要从右向左读取,表示为某一向量从坐标系2到坐标系1内的坐标。t12需要从左向右读取,表示为坐标1的原点指向坐标系2的原点,在坐标系1下的表示
旋转向量和欧拉角
为了减少约束,并且更加紧凑地表示旋转矩阵,引入了旋转向量这一概念,旋转向量的方向与转轴一致,旋转向量的长度等于旋转角;同样地为了更加紧凑地表示变换矩阵,使用一个旋转向量和一个平移向量就可以表示一个变换矩阵
旋转向量和旋转矩阵的转换
现在考虑一个旋转矩阵R,假设旋转轴为单位向量n,旋转角度为α,那么向量αn就通过罗德利斯公式转换为旋转矩阵,来表示这个旋转

欧拉角
无论是旋转矩阵,还是旋转向量,虽然能描述旋转,单对于人来说是非常不直观的;即使用这两个东西更像是在代数上使用,难以在几何中想象出旋转究竟是什么;使用欧拉角就可以,但是欧拉角具有奇异性,万向锁,
四元数
四元数和旋转向量一样是紧凑的,同时比起旋转向量来说不带有奇异性;它是紧凑的,也没有奇异性
加减法

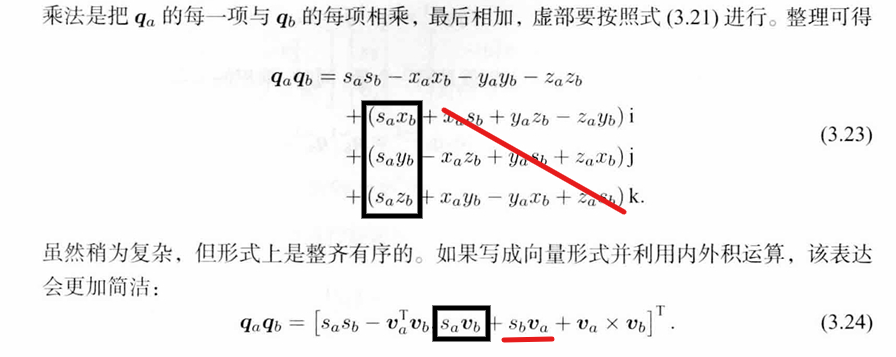
乘法
四元数与旋转向量之间的转换


 浙公网安备 33010602011771号
浙公网安备 33010602011771号