DexYCB数据集3D内容理解与指南
DexYCB是一个人手抓取物体的序列数据集,而序列数据集涉及坐标系以及各种参数,要用DexYCB数据集,就得知道数据集的内容,知道每个参数的含义以及所在的坐标系。本人主要研究3D的动捕数据,因此主要研究DexYCB中的3D形式,而DexYCB不止包含3D形式,还有各种手工标记的label、RGB-D图像等,需自行了解。本文通过参考DexYCB论文、源码、issues等,总结出对数据集的3D内容理解与指南。
DexYCB网站
DexYCB论文
DexYCB源码
DexYCB简要介绍
这部分主要是从论文中学习到的。
- 数据集采集的时候是RGB-D图,共有8个相机视角,以30帧/秒的速度记录所有8个视图,颜色和深度分辨率为640×480。(DexYCB根据采集的图像,提供了每一帧的物体、手的3D信息。)
- 数据集在桌面上进行,包含手和物体,物体来自YCB数据集,共10个类别,每个类别20个物体。桌子上会放2-4个物体,其中包含一个目标物体,手从一个放松的姿势开始,拿起目标物体,并把它举在空中。
- 实验以每个trial为主,一个trial就是一个序列。一个trial有3秒的时间。对于每个目标物体重复进行5次trials,每次使用一组随机的伴随物体(桌面摆放的物体)和放置。由于有100个物体,整个实验有1000个序列。
- 关于手和物体的ground-truth 3D信息获取方式是依赖于对每个视图中的手和对象的2D关键点注释,并通过优化得到的(详情见论文中的2.3节)。手有21个关节点(一个腕关节点,每根手指有4个关节点),物体是人为标注的。
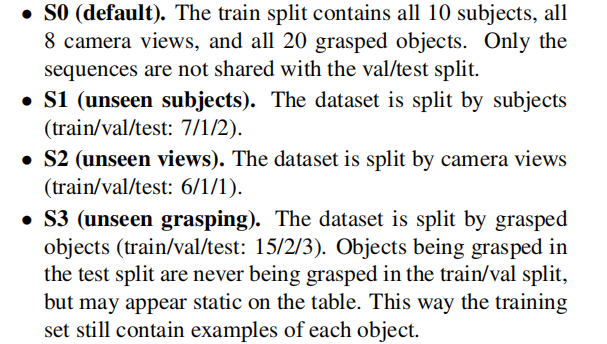
- DexYCB提供了四个场景下train/val/test的不同分割方式,如下:
DexYCB数据集细节
DexYCB数据集官网有给出下载链接,共10个类别,一个类别大概11G。另外要下载bop、calibration、models三个文件夹,对后续数据处理有帮助。
目录情况
下面介绍一下数据集目录情况。
├── 20200709-subject-01 类别
├── 20200709_153548 序列名,每个类别有100个序列
├── pose.npz 每一帧的物体和手的pose信息
├── meta.yml 保存一些超参数,如桌面的物体编号、目标对象编号、左/右手、帧数等
├── 932122062010 相机视角名,每个序列有8个视角
├── labels_000001.npz 每一帧的标签,后面编号是帧数索引,不同序列的帧数不一样
├── ...
├── color_000001.jpg 每一帧的RGB,后面编号是帧数索引
├── ...
├── aligned_depth_to_color_000001.png 每一帧的深度图
├── ...
└── ...
└── ...

 浙公网安备 33010602011771号
浙公网安备 33010602011771号