
机器人关节空间轨迹规划--S型速度规划
-
关节空间 VS 操作空间
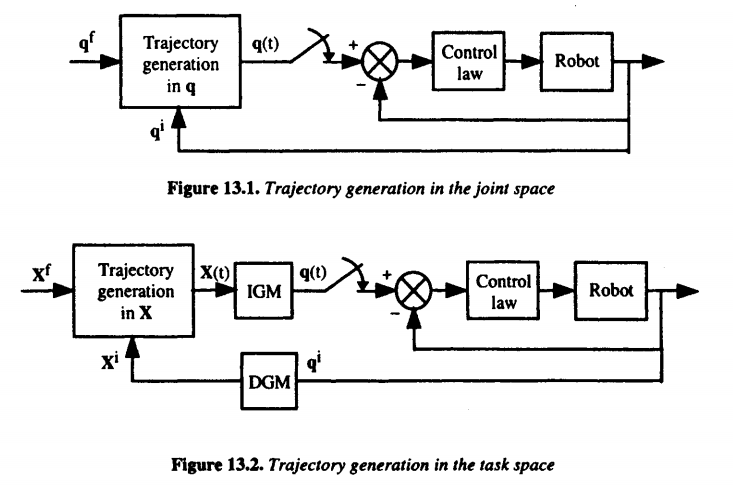
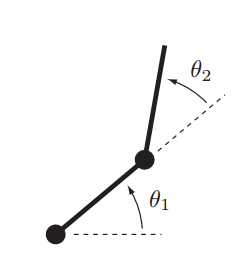
关节空间与操作空间轨迹规划流程图如下(上标$i$和$f$分别代表起始位置initial和目标位置final):
在关节空间内进行轨迹规划有如下优点:
- 在线运算量更小,即无需进行机器人的逆解或正解解算
- 不受机器人奇异构型影响
- 可以根据机器人或驱动器手册直接确定最大速度或力矩
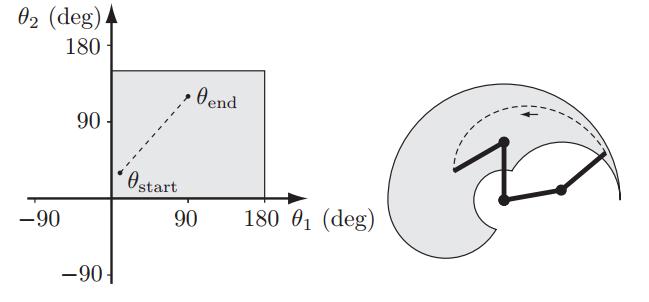
其缺点是对应操作空间的轨迹无法预测,增加了机械臂与环境碰撞的可能。例如,考虑下面的二连杆机构,关节运动的限制为:$0^{\circ} \le \theta_1 \le 180^{\circ}$,$0^{\circ} \le \theta_2 \le 150^{\circ}$
下图中,左侧为关节空间内规划的线性运动轨迹,而其对应在操作空间的轨迹却是弧线。机构末端的可达空间在图中由灰色背景表示,其大小和形状受关节运动范围的影响。
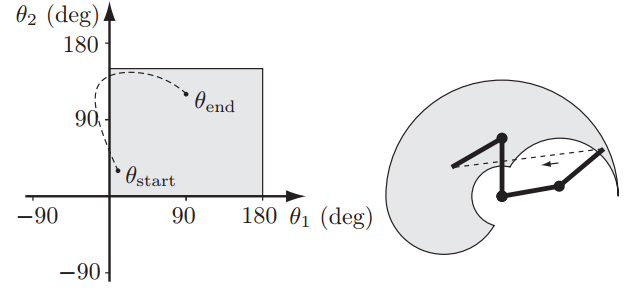
下图在操作空间中规划了一条直线轨迹,其对应的关节空间轨迹为一弧线,且在运动过程中超出了关节值限制。操作空间内进行轨迹规划优点是直观,缺点是计算量大(需要计算逆解),会遇到奇异性问题以及关节运动超限等。
到底是选择在关节空间还是操作空间内进行轨迹规划,取决于任务需要。需要考虑避障或必须沿特定轨迹运动时选择操作空间轨迹规划,只需考虑速度、力矩、关节范围等运动约束时选择关节空间轨迹规划(The joint space scheme is appropriate to achieve fast motions in a free space)。
-
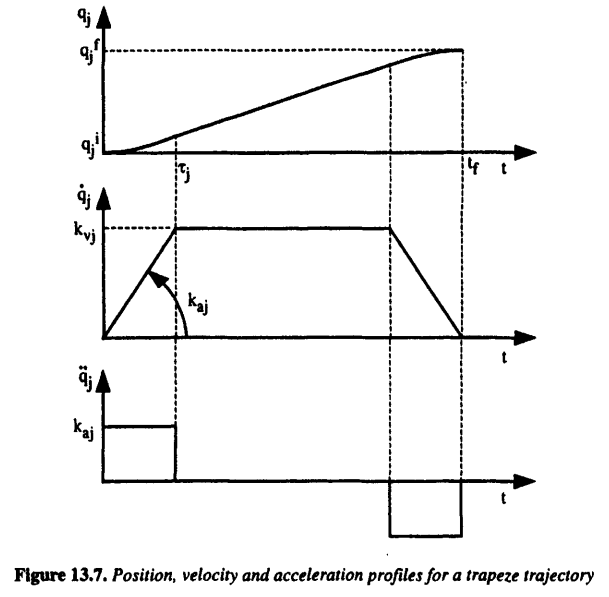
梯形速度曲线
运动控制系统中常用的梯形速度曲线如下图所示,会出现加速度不连续的情形(从$k_{aj}$到0的跳变),这样可能会导致机械系统出现冲击或不可预料的振动,不过由于机械系统存在一定的弹性并不是绝对刚体,这种加速度不连续造成的冲击会被机械机构滤除或减轻。而对于高速重载的机器人来说,这种加速度不连续造成的影响就不能忽略了。可以参考知乎上这个问题:多轴插补为什么普遍使用梯形速度曲线?
-
S型速度曲线
为了使加速度连续,可对梯形速度规划中的加速度曲线进行修改,使加速度曲线变为连续的二次曲线(a)或者梯形曲线(b),如下图所示。其中,$\tau'$为加速段时间,$\lambda_jk_{vj}$为第$j$个关节的最大运动速度

下面考虑a方法(Linear Trajectory with Polynomial Blends),关节$j$的运动边界条件如下,即关节$j$初始时刻位置为$q_j^i$,初始速度加速度为0,$\tau'$时刻加速到最大速度$\lambda_ik_{vj}sign(D_i)$,$k_{vj}$为理论上关节$j$允许的最大速度,$\lambda_j$为一比例系数($0 \le \lambda_j \le 1$),$D_j$为从起始位置到目标位置的位移,它是一个有正负的数值。

根据边界条件加速度二次曲线表达式为:$k(t-\tau')t$,对其进行积分,可得$\dot{q_j}(t)=\frac{1}{6}k(2t-3\tau')t^2+C$,根据速度边界条件可知$C=0$,$k=\frac{-6}{\tau'^3}\lambda_jk_{vj}$。于是推算出加速度、速度、位置的表达式分别为:$$\begin{cases}& q_j(t)=q_j^i-\frac{1}{\tau'^3}\lambda_jk_{vj}sign(D_j)(\frac{1}{2}t-\tau')t^3\\&\dot{q_j}(t)=-\frac{1}{\tau'^3}\lambda_jk_{vj}sign(D_j)(2t-3\tau')t^2\\&\ddot{q_j}(t)=-\frac{6}{\tau'^3}\lambda_jk_{vj}sign(D_j)(t-\tau')t \end{cases}$$
加速度在$t=\tau'/2$时最大,其幅值为$\left |\ddot{q}_{jmax} \right |=\frac{3}{2}\frac{\lambda_jk_{vj}}{\tau'}=\upsilon_j k_{aj}$,则有:$$\tau'=\frac{3}{2}\frac{\lambda_jk_{vj}}{\upsilon_j k_{aj}}$$
根据上式和$q_j(t)$的表达式,可以计算出加速阶段的位移为:$$|q_j^i-q_j(\tau')|=\frac{3}{4}\frac{(\lambda_jk_{vj})^2}{\upsilon_j k_{aj}}$$
速度曲线与时间轴围成的面积为$|D_j|$,根据计算可以得到关系式:$$t'_f=\tau'+\frac{|D_j|}{\lambda_jk_{vj}}$$
在加速度为0的阶段(最大速度阶段,$\tau' \le t \le \tau'+h'$),关节速度表达式为:$$q_i(t)=q_j(\tau')+(t-\tau')\lambda_jk_{vj}sign(D_j)$$
减速阶段与加速阶段对称($t'_f=2\tau'+h'$),减速阶段在时间段$\tau'+h' \le t \le t'_f$上的轨迹为:$$\begin{cases}&q_j(t)=q_j^f+\frac{1}{2}[\frac{1}{\tau'^3}(t-3\tau'-h')(t-\tau'-h')^3+(2t-3\tau'-2h')]\lambda_jk_{vj}sign(D_j) \\ &\dot{q_j}(t)=[\frac{1}{\tau'^3}(2t-5\tau'-2h')(t-\tau'-h')^2+1]\lambda_jk_{vj}sign(D_j) \\ &\ddot{q_j}(t)= \frac{6}{\tau'^3}(t-2\tau'-h')(t-\tau'-h')\lambda_jk_{vj}sign(D_j)\end{cases}$$
如果目标点距离初始位置过近,可能达不到最大速度和加速度就要开始减速,考虑以最大速度做匀速直线运动阶段的时间为0这种临界状态(The minimum time $t_f$ is obtained when the parameters $\lambda_j$ and $\upsilon_j$ are the largest),为了能以最大速度运动,位移$|D_j|$必须满足如下条件:$$|D_j| > \frac{3}{2}\frac{k_{vj}^2}{k_{aj}}$$ 如果该条件不能满足,则最大速度值应为:$$k'_{vj}=\sqrt{\frac{2}{3}|D_j|k_{aj}}$$ 前面的计算都只考虑单轴运动的情况,当需要多轴同步时,要考虑运动时间最长的轴(与每个轴的最大速度、运动位移等因素有关),将该时间作为同步运动的时间。在确定了同步时间之后,需要重新计算速度曲线的最大速度(运动快的轴要降低最大速度等待慢的轴),使得各轴在同一时刻到达设定的目标位置。
参考《Modeling Identification and Control of Robots》的第 13.3.4节 Continuous acceleration profile with constant velocity phase 以及 libfranka MotionGenerator,修改关节空间轨迹规划代码,并在while循环中进行轨迹生成的模拟。
traj.h


#pragma once #include <array> #include <Eigen/Core> struct RobotState { std::array<double, 7> q_d{}; }; class TrajectoryGenerator { public: // Creates a new TrajectoryGenerator instance for a target q. // @param[in] speed_factor: General speed factor in range [0, 1]. // @param[in] q_goal: Target joint positions. TrajectoryGenerator(double speed_factor, const std::array<double, 7> q_goal); // Calculate joint positions for use inside a control loop. bool operator()(const RobotState& robot_state, double time); private: using Vector7d = Eigen::Matrix<double, 7, 1, Eigen::ColMajor>; using Vector7i = Eigen::Matrix<int, 7, 1, Eigen::ColMajor>; bool calculateDesiredValues(double t, Vector7d* delta_q_d); // generate joint trajectory void calculateSynchronizedValues(); static constexpr double DeltaQMotionFinished = 1e-6; const Vector7d q_goal_; Vector7d q_start_; // initial joint position Vector7d delta_q_; // the delta angle between start and goal Vector7d dq_max_sync_; Vector7d t_1_sync_; Vector7d t_2_sync_; Vector7d t_f_sync_; Vector7d q_1_; // q_1_ = q(\tau) - q_start_ double time_ = 0.0; Vector7d dq_max_ = (Vector7d() << 2.0, 2.0, 2.0, 2.0, 2.5, 2.5, 2.5).finished(); Vector7d ddq_max_ = (Vector7d() << 5, 5, 5, 5, 5, 5, 5).finished(); Vector7d dq; };
traj.cpp
#include "traj.h" #include <algorithm> #include <array> #include <cmath> TrajectoryGenerator::TrajectoryGenerator(double speed_factor, const std::array<double, 7> q_goal) : q_goal_(q_goal.data()) { dq_max_ *= speed_factor; ddq_max_ *= speed_factor; dq_max_sync_.setZero(); q_start_.setZero(); delta_q_.setZero(); t_1_sync_.setZero(); t_2_sync_.setZero(); t_f_sync_.setZero(); q_1_.setZero(); } bool TrajectoryGenerator::calculateDesiredValues(double t, Vector7d* delta_q_d) { Vector7i sign_delta_q; sign_delta_q << delta_q_.cwiseSign().cast<int>(); // sign(D_j) Vector7d t_d = t_2_sync_ - t_1_sync_; // h' std::array<bool, 7> joint_motion_finished{}; // motion falgs for (size_t i = 0; i < 7; i++) // calculate joint positions { if (std::abs(delta_q_[i]) < DeltaQMotionFinished){ // target approaches the goal (*delta_q_d)[i] = 0; joint_motion_finished[i] = true;} else { if (t < t_1_sync_[i]) { (*delta_q_d)[i] = -1.0 / std::pow(t_1_sync_[i], 3.0) * dq_max_sync_[i] * sign_delta_q[i] * (0.5 * t - t_1_sync_[i]) * std::pow(t, 3.0); dq[i] = -1.0 / std::pow(t_1_sync_[i], 3.0) * dq_max_sync_[i] * sign_delta_q[i] * (2.0 * t - 3 * t_1_sync_[i]) * std::pow(t, 2.0); } else if (t >= t_1_sync_[i] && t < t_2_sync_[i]) { (*delta_q_d)[i] = q_1_[i] + (t - t_1_sync_[i]) * dq_max_sync_[i] * sign_delta_q[i]; dq[i] = dq_max_sync_[i]; } else if (t >= t_2_sync_[i] && t < t_f_sync_[i]) { (*delta_q_d)[i] = delta_q_[i] + 0.5 *(1.0 / std::pow(t_1_sync_[i], 3.0) *(t - 3.0 * t_1_sync_[i] - t_d[i]) *std::pow((t - t_1_sync_[i] - t_d[i]), 3.0) + (2.0 * t - 3.0 * t_1_sync_[i] - 2.0 * t_d[i])) *dq_max_sync_[i] * sign_delta_q[i]; dq[i] = (1.0 / std::pow(t_1_sync_[i], 3.0) *(2 * t - 5.0 * t_1_sync_[i] - 2 * t_d[i])*std::pow((t - t_1_sync_[i] - t_d[i]), 2.0) + 1) * dq_max_sync_[i] * sign_delta_q[i]; } else { (*delta_q_d)[i] = delta_q_[i]; // reach the goal joint_motion_finished[i] = true;} } } return std::all_of(joint_motion_finished.cbegin(), joint_motion_finished.cend(),[](bool x) { return x; }); } void TrajectoryGenerator::calculateSynchronizedValues() { Vector7d dq_max_reach(dq_max_); Vector7d t_f = Vector7d::Zero(); Vector7d t_1 = Vector7d::Zero(); Vector7i sign_delta_q; sign_delta_q << delta_q_.cwiseSign().cast<int>(); // only consider single axis for (size_t i = 0; i < 7; i++) { if (std::abs(delta_q_[i]) > DeltaQMotionFinished) { if ( std::abs(delta_q_[i]) < 3.0 / 2.0 * std::pow(dq_max_[i], 2.0) / ddq_max_[i] ) { // the goal not far enough from start position dq_max_reach[i] = std::sqrt( 2.0 / 3.0 * delta_q_[i] * sign_delta_q[i] * ddq_max_[i] ); // recalculate the maximum velocity } t_1[i] = 1.5 * dq_max_reach[i] / ddq_max_[i]; t_f[i] = t_1[i] + std::abs(delta_q_[i]) / dq_max_reach[i]; } } // take account of the slowest axis double max_t_f = t_f.maxCoeff(); // consider the synchronization of multiple axises for (size_t i = 0; i < 7; i++) { if (std::abs(delta_q_[i]) > DeltaQMotionFinished) { double a = 3.0 / 2.0 * ddq_max_[i]; double b = -1.0 * max_t_f * std::pow(ddq_max_[i] , 2.0); double c = std::abs(delta_q_[i]) * std::pow(ddq_max_[i], 2.0); double delta = b * b - 4.0 * a * c; if (delta < 0.0) { delta = 0.0; } // according to the area under velocity profile, solve equation "a * Kv^2 + b * Kv + c = 0" for Kv dq_max_sync_[i] = (-1.0 * b - std::sqrt(delta)) / (2.0 * a); // Kv: maximum synchronization velocity t_1_sync_[i] = 1.5 * dq_max_sync_[i] / ddq_max_[i]; t_f_sync_[i] =(t_1_sync_)[i] + std::abs(delta_q_[i] / dq_max_sync_[i]); t_2_sync_[i] = (t_f_sync_)[i] - t_1_sync_[i]; q_1_[i] = (dq_max_sync_)[i] * sign_delta_q[i] * (0.5 * (t_1_sync_)[i]); } } } bool TrajectoryGenerator::operator()(const RobotState& robot_state, double time) { time_ = time; if (time_ == 0.0) { q_start_ = Vector7d(robot_state.q_d.data()); delta_q_ = q_goal_ - q_start_; calculateSynchronizedValues(); } Vector7d delta_q_d; bool motion_finished = calculateDesiredValues(time_, &delta_q_d); std::array<double, 7> joint_positions; Eigen::VectorXd::Map(&joint_positions[0], 7) = (q_start_ + delta_q_d); return motion_finished; }
main.cpp
#define _USE_MATH_DEFINES #include <math.h> #include "traj.h" #include <thread> #include <iostream> int main(int argc, char *argv[]) { RobotState current_state; current_state.q_d = { 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0 }; double speed_factor = 0.5; std::array<double, 7> q_goal = { M_PI_4, M_PI_2, 0.0 , 0.0 , 0.0 , 0.0, 0.0 }; TrajectoryGenerator traj_generator(speed_factor, q_goal); quint64 count = 0; bool isfinished = false; while (!isfinished) { isfinished = traj_generator(current_state, count / 1000.0); std::this_thread::sleep_for(std::chrono::milliseconds(1)); count++; } std::cout << "Motion finished" << std::endl; return 0; }
注意以下几点:
1. 原examples_common.h代码中的ddq_max_start_为加速度,ddq_max_goal_为减速度(接近目标点,开始减速),大多数情况下两者相等
2. 在根据速度曲线与时间轴围成的面积计算最大同步速度的时候,会遇到一元二次方程$a\cdot v_{sync}^2+b\cdot v_{sync}+c=0$求解的问题,对于大于零的两个解要选其中数值小的那个,否则会超过最大速度限制,即取值为$\frac{-b-\sqrt{b^2-4ac}}{2a}$。可以简要证明如下:
这两个解分布在$v=\frac{-b}{2a}$的两侧,而$\frac{-b}{2a}=\frac{t_{f}k_a}{3}=\frac{1}{3}(\frac{3}{2}\frac{k_v}{k_a}+\frac{|D_j|}{k_v})k_a=\frac{1}{2}k_v+\frac{1}{2}(\frac{2|D_j|k_a}{3k_v})$,根据$|D_j|$的条件 $\frac{2|D_j|k_a}{3k_v}-k_v=\frac{1}{3k_v}(2|D_j|k_a-3k_v^2)> 0$,因此$\frac{-b}{2a}> k_v$,即值较大的解会超出速度限制。
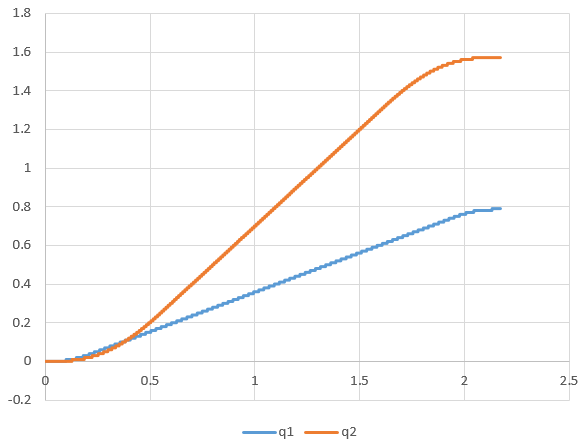
将时间、轴1轴2的关节角度和速度保存在CSV文件中,用Excel画出散点图。关节角度随时间变化曲线如下(轴1从0→45°,轴2从0→90°):
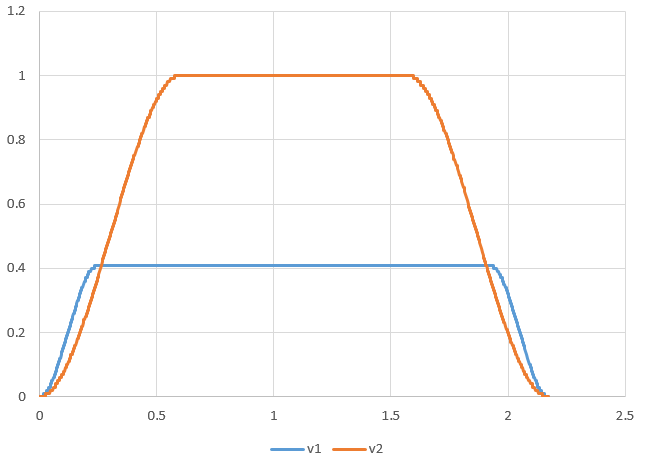
关节速度随时间变化曲线如下:
参考:
机器人中的轨迹规划(Trajectory Planning )
周期同步位置模式(CSP),轮廓位置模式(PPM),位置模式(PM)
Robot and interface specifications
Trajectory Planning for Automatic Machines and Robots
Modeling Identification and Control of Robots. 13.3.4 Continuous acceleration profile with constant velocity phase

 浙公网安备 33010602011771号
浙公网安备 33010602011771号