


A NEW AUTOMOTIVE RADAR 4D POINT CLOUDS DETECTOR BY USING DEEP LEARNING
ICASSP 2021 - 2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) 被引:8
本文为了解决传统雷达测的点云稀疏和错误点(clutter points)多的为问题,提出了一个基于深度学习利用了目标在空间分布的特征的检测方法。
常规方法生产4d点云的流程:
1.先经过1dfft和2dfft转化为range-doppler图
2.检测到的信号强的点就被看做物体
3.利用数字波束形成(digital beamforming,DBF)得到目标物体的角度和高度
本文提出的方法:
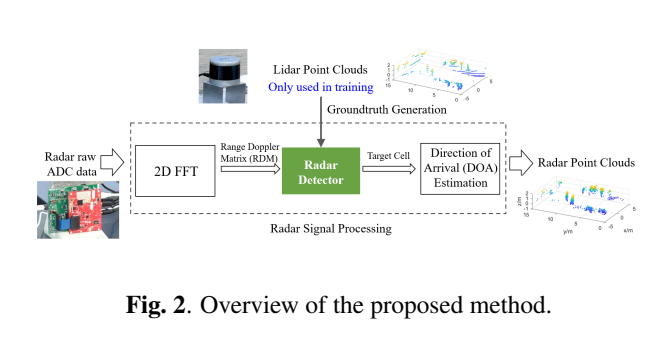
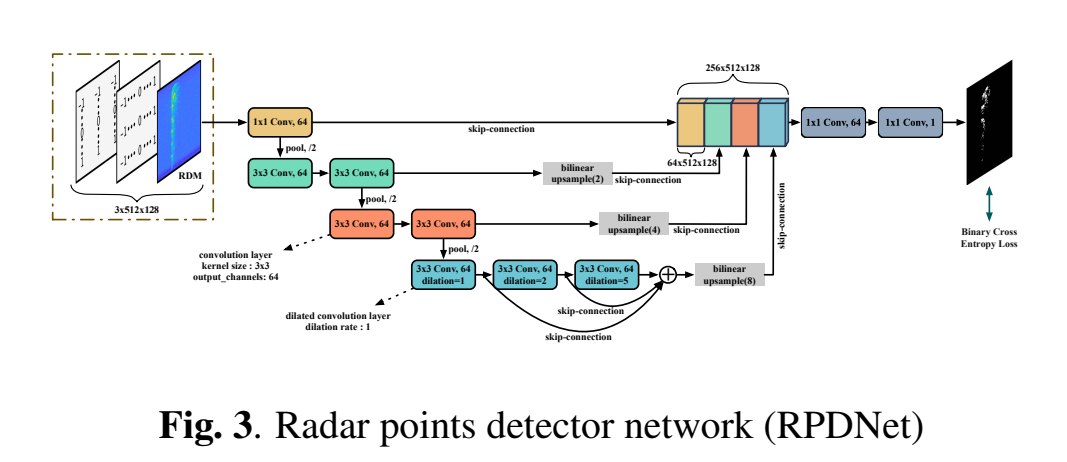
作者将在RDI中检测物体看做一个语义分割的工作。
RDI和RGB图有一些不同,比如浅层的特征已经够用了,就不需要通过往网络模型中添加更多的层,来提取深层次的特征。(还有两个关于语义分割的分析没懂,待补
提出了自己的网络RPDNet(radar points detector network)
用激光雷达采集到的数据作为ground truth,再通过坐标变化和时间戳时间戳对齐等操作,同步毫米波雷达点云和激光雷达点云数据。
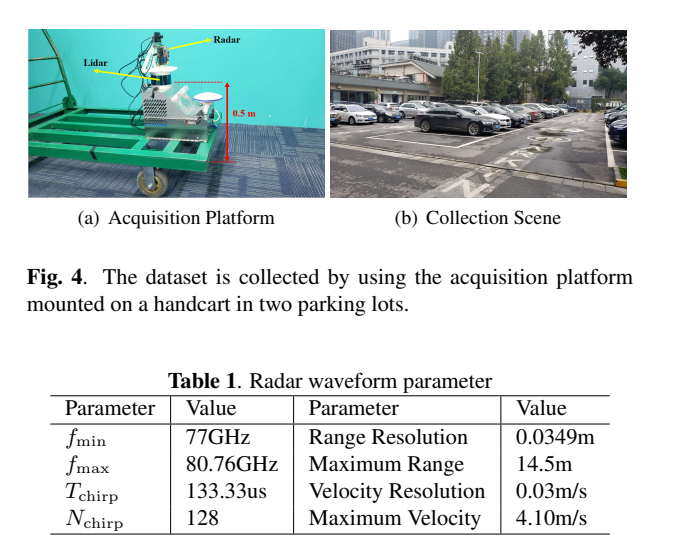
实验设备是AWR1843,设置3TX 4RX,16-beam的激光雷达,采集4000帧数据,3000帧作为训练集,1000帧作为测试集
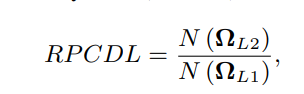
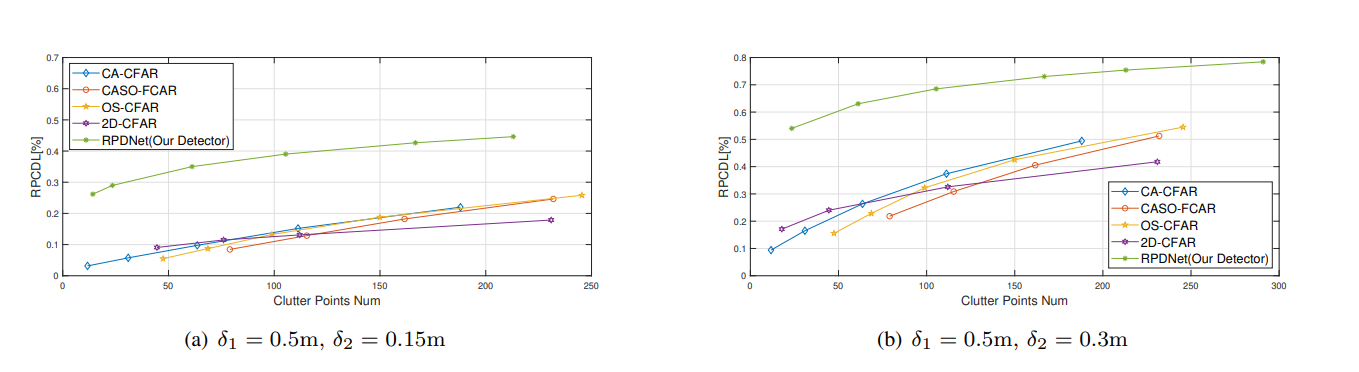
提出了一种评估标准,
ΩR2 = {q ∈ ΩR1, s.t, d(q, p) > δ1, ∀p ∈ ΩL1}
ΩL2 = {p ∈ ΩL1, ∃q ∈ ΩR1, s.t, d(p, q) < δ2}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号