基于Simulink的二阶系统频谱分析
基于Simulink的二阶系统频谱分析
软件:MATLAB、Solidworks、COMSOL
制作人:梦想小猪
制作时间:2023年6月12日
参考文献
[1] Ni Y, Li H, Huang L, et al. On bandwidth characteristics of tuning fork micro-gyroscope with mechanically coupled sense mode[J]. Sensors, 2014, 14(7): 13024-13045.
[2] Sheikhaleh A, Jafari K, Abedi K. Design and analysis of a novel MOEMS gyroscope using an electrostatic comb-drive actuator and an optical sensing system[J]. IEEE Sensors Journal, 2018, 19(1): 144-150.
问题描述
问题叙述
如何建立基于科氏效应的陀螺仪数学模型?如何分析其频率响应,计算灵敏度?
解决思路
(1)在COMSOL中建立驱动检测解耦的陀螺结构,并获取其质量、刚度等信息;
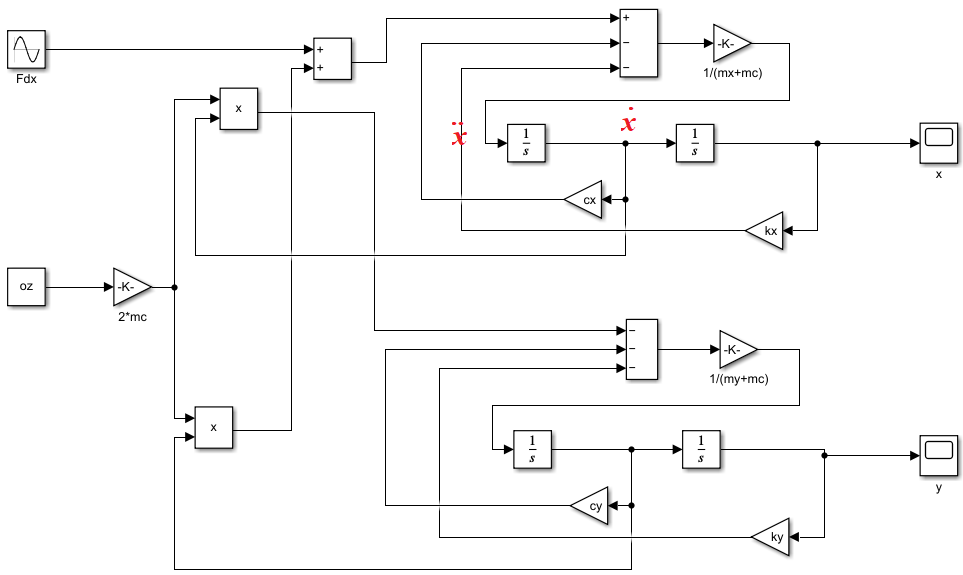
(2)联立驱动检测方向的“质量-弹簧-阻尼”系统动态方程;
其中驱动力,
方程根据牛顿第二定律构建,x轴为驱动方向,y轴为检测方向。其中是科氏力。
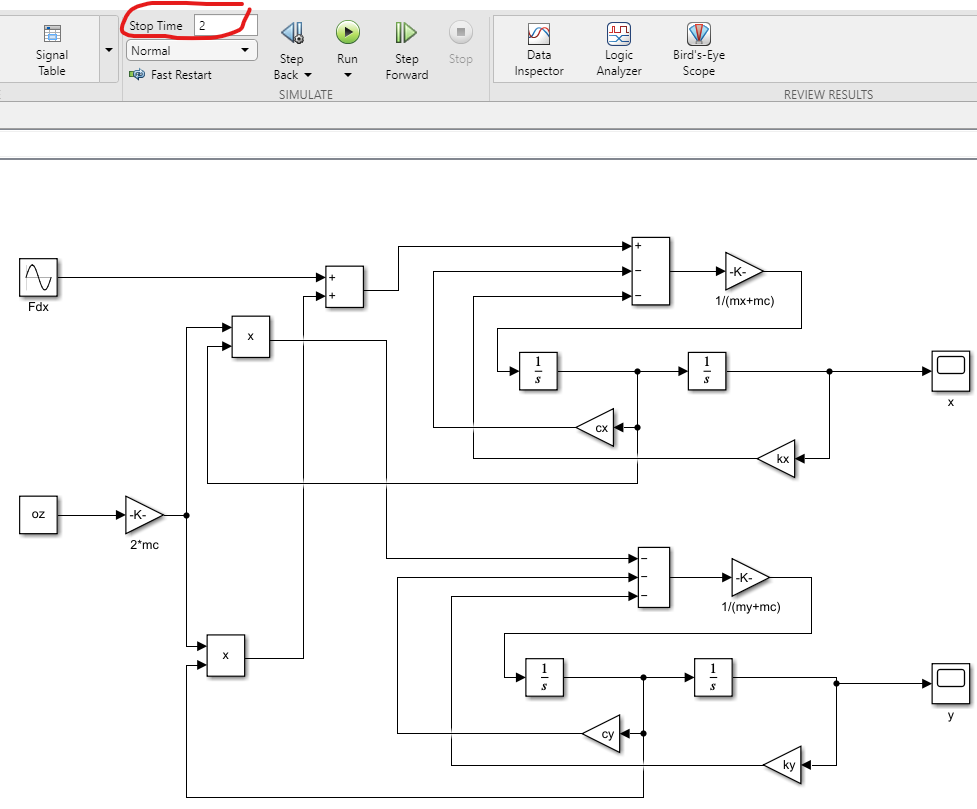
(3)根据(2)中的方程,在Simulink中搭建方程模块;
(4)采用MATLAB的实时编程功能进行频率响应的分析。
操作流程
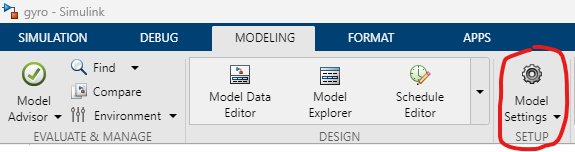
双击打开MATLAB软件。

工具栏中左键单击Simulink,打开Simulink。

进入Simulink界面,在Library中选择需要使用到的模块。

根据陀螺方程,在Simulink中搭建方程模块,如下图所示。
在MATLAB实时编辑器中定义参量:
%parameters;
mx = 0.8e-7; %kg,驱动解耦框质量
my = 0.8e-7; %kg,检测解耦框质量
mc = 0.5e-6; %kg,科氏质量
fx = 5480; %Hz,驱动模态的特征频率,由COMSOL仿真得到
fy = 5864; %Hz,检测模态的特征频率,由COMSOL仿真得到
kx = (mx+mc)*(2*pi*fx)^2; %N/m
ky = (my+mc)*(2*pi*fy)^2; %N/m
Qx= 1000;
Qy= 1000;
cx= (mx+mc)*(2*pi*fx)/Qx ; %N/(m/s)
cy= (my+mc)*(2*pi*fy)/Qy ; %N/(m/s)
oz= 100; %rad/s 输入角速率,手动扫描,后期分析灵敏度**
Fd= 10e-6; %N 驱动振幅
fd= 10 ; %Hz驱动频率,扫描参量
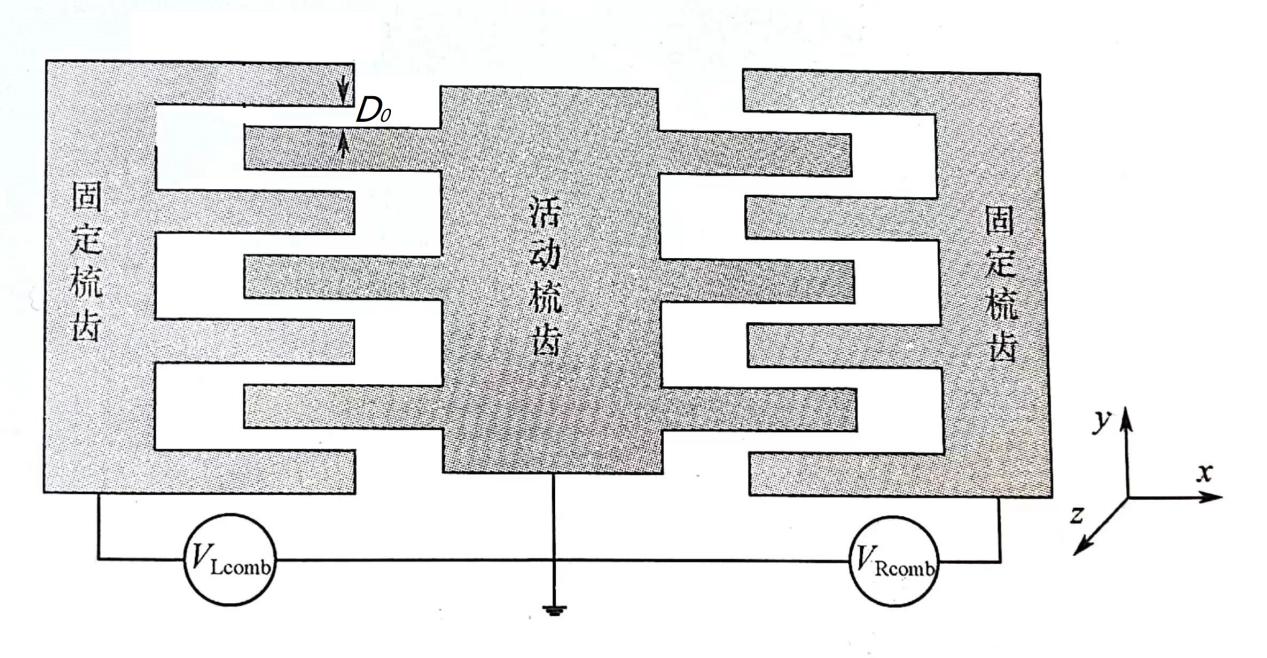
陀螺的机械模型
在COMSOL中建立陀螺的机械结构,并进行特征频率分析,具体参数参考文献[1]。
如何代入参数值?
k, c为等效刚度和等效阻尼。在MEMS系统中相对于内在阻尼(如热弹性阻尼、锚点损耗)空气阻尼占主导地位,在低真空封装下,Q值一般为1500,高真空封装下,Q值能达到20000。
驱动振幅Fd的值如何计算?
其中,N梳齿个数,H0梳齿厚度,D0梳齿间隙,V0直流分量,V1交流分量幅度。
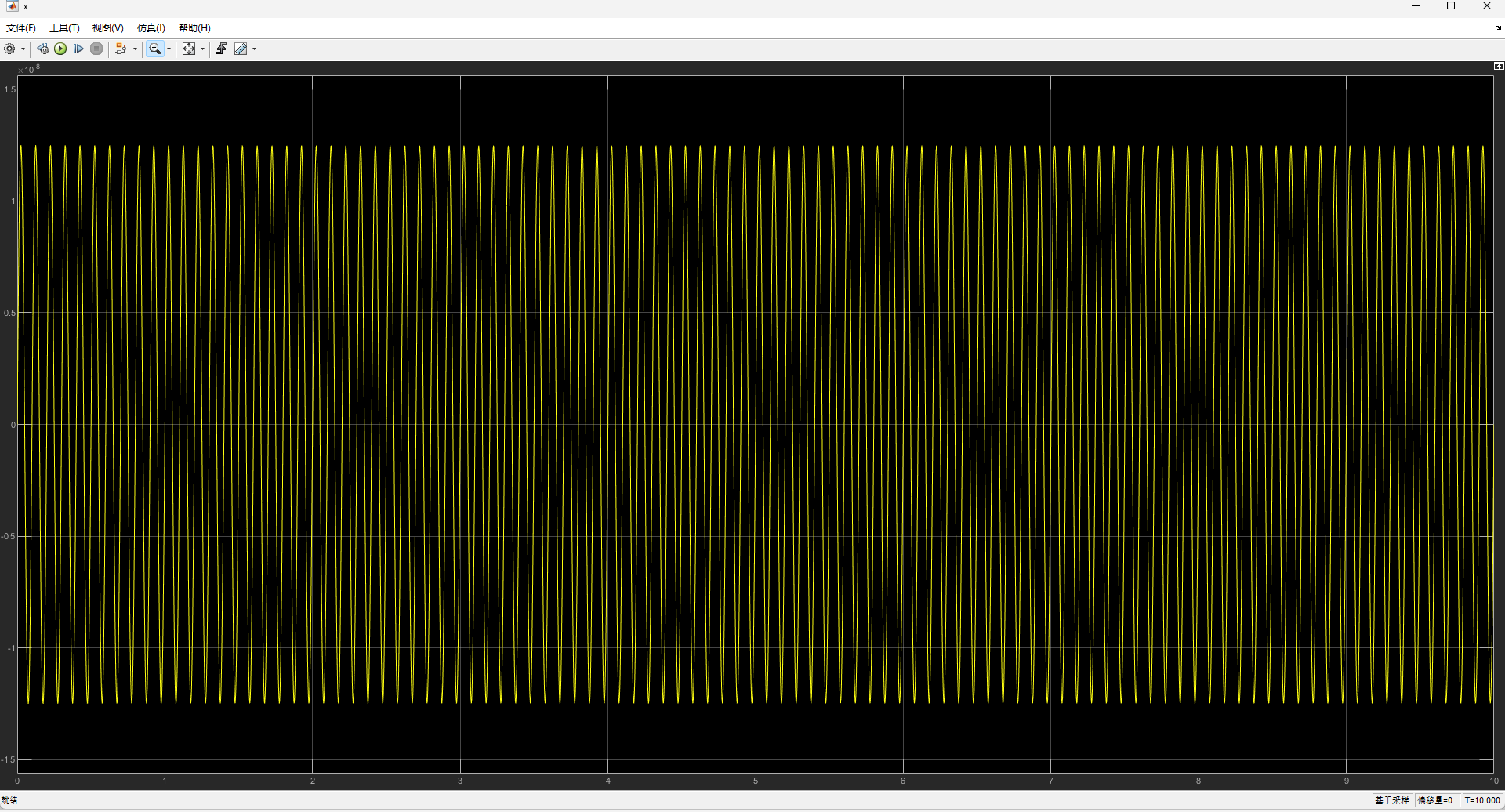
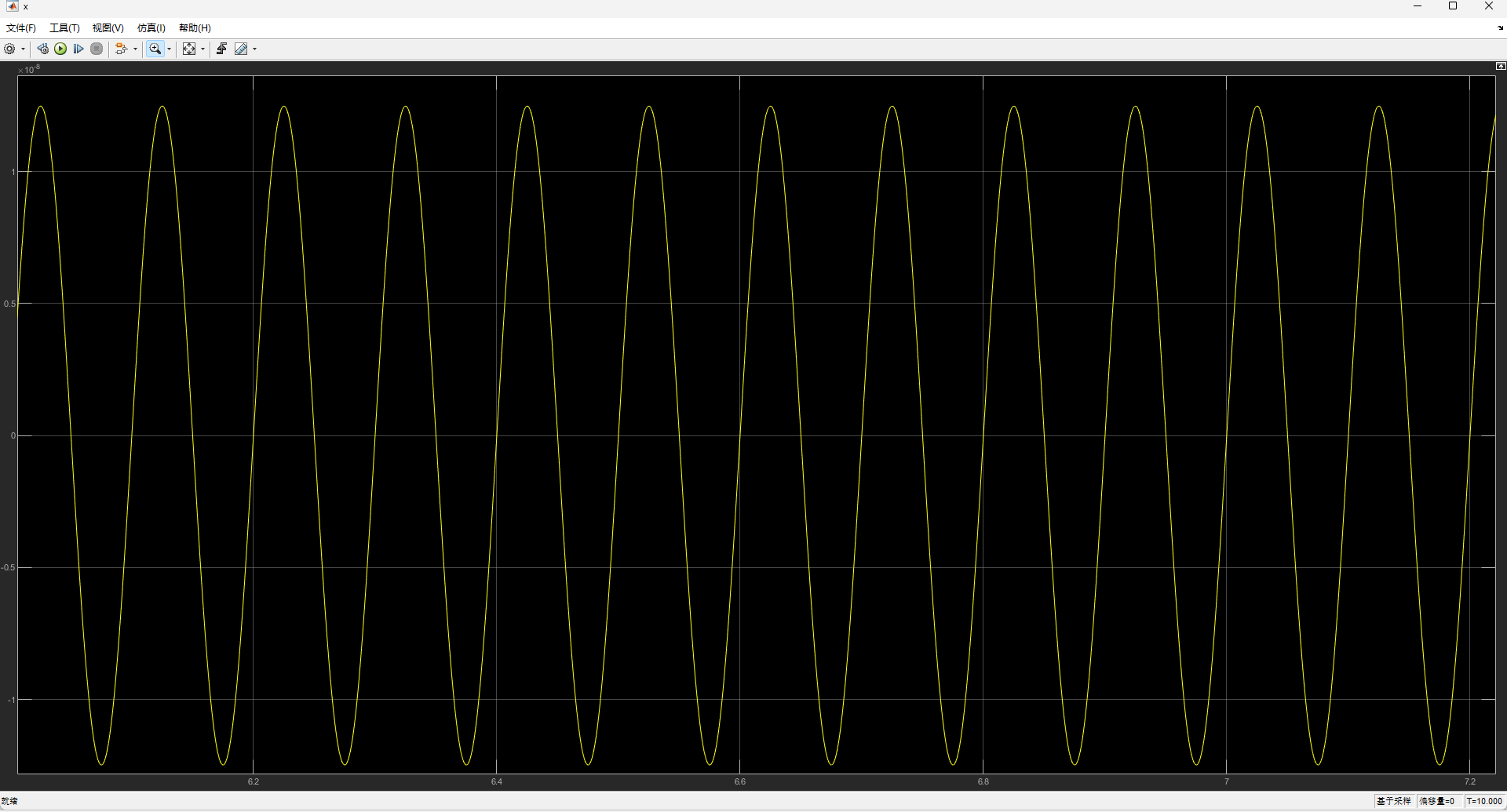
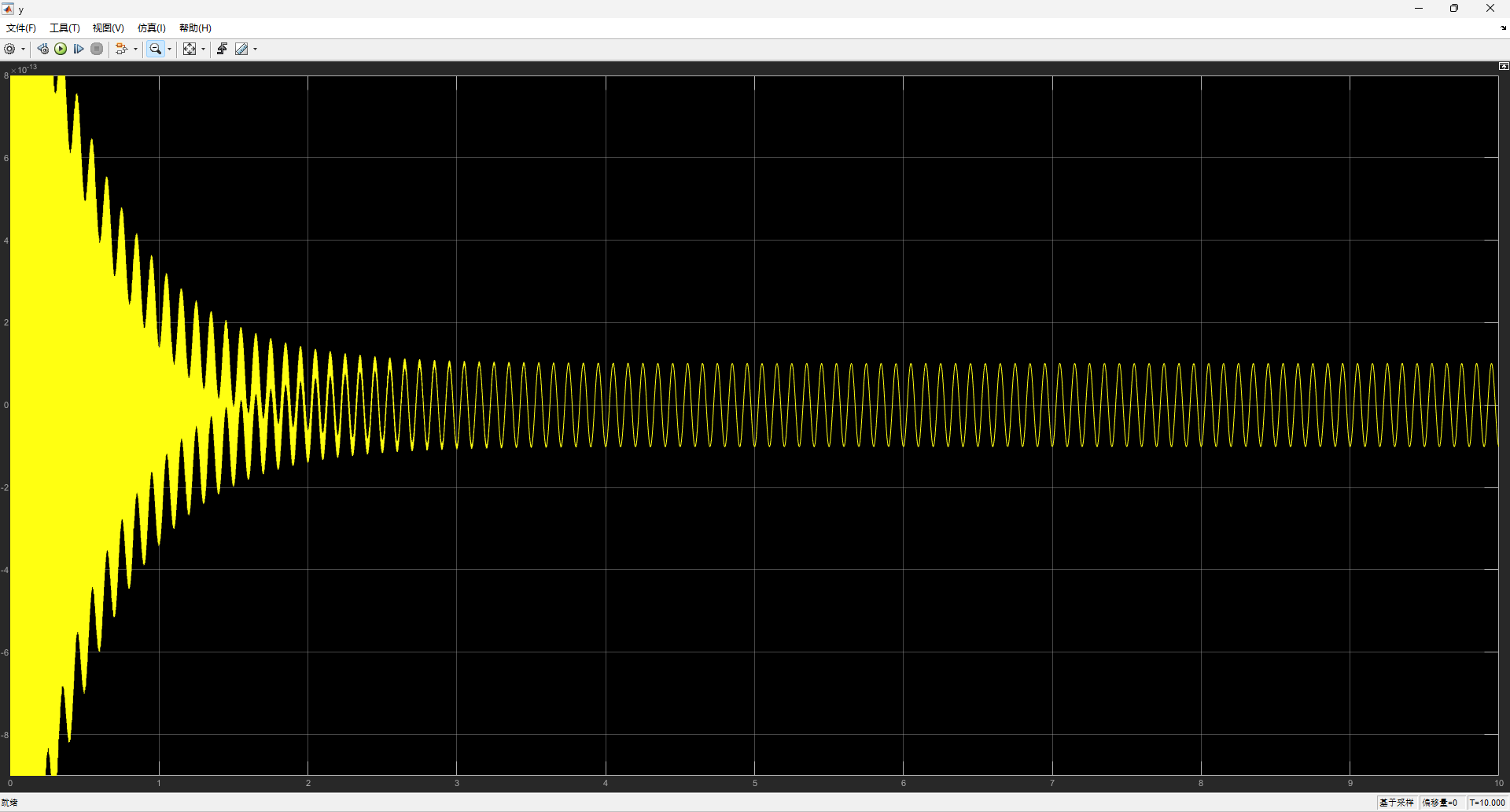
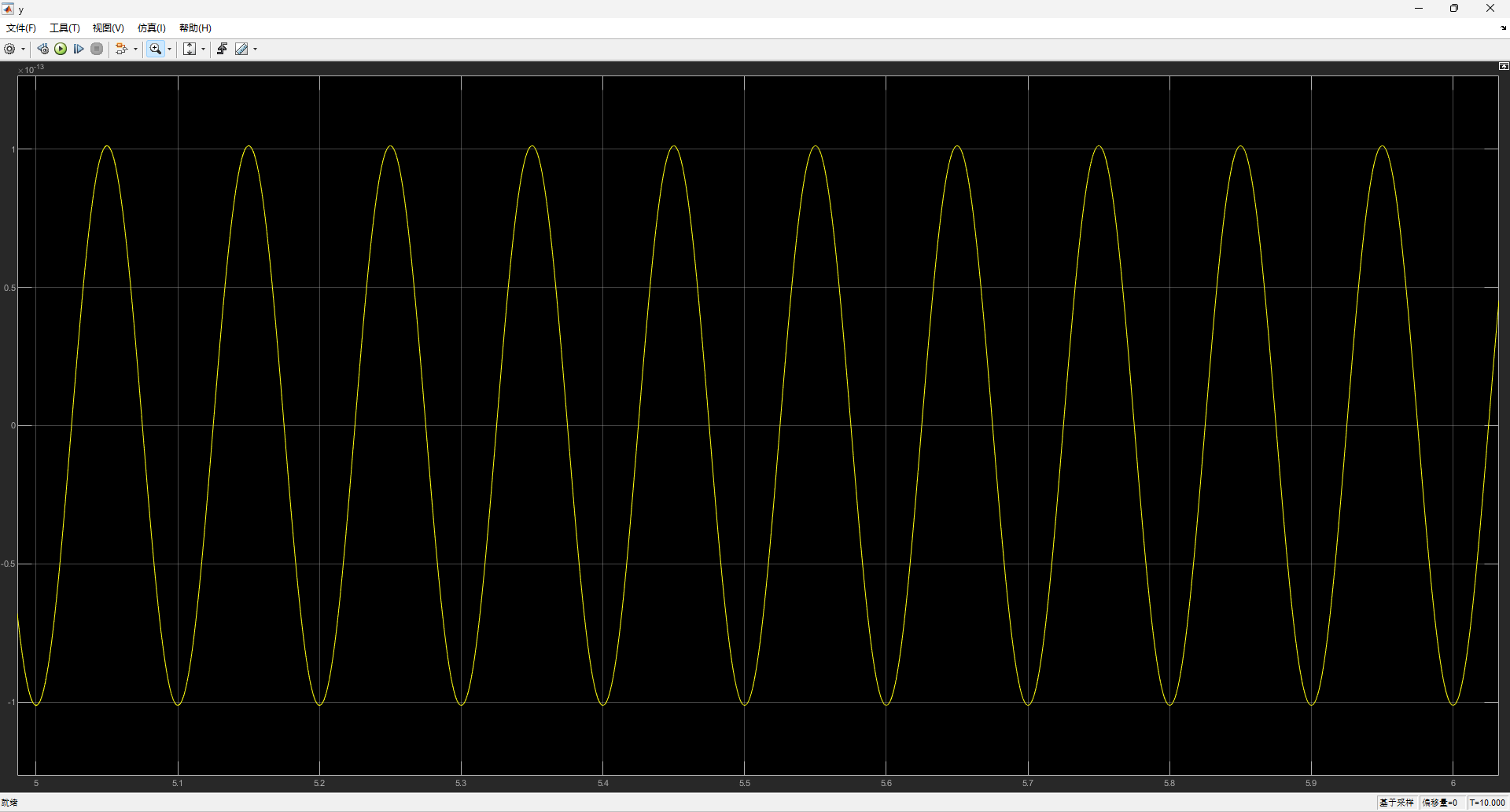
示波器显示时域波形
在MATLAB实时编辑器中定义好参量后,点击运行按钮,参数值就会代入Simulink模型。

运行Simulink模型:

双击示波器x,y分别查看位移随时间的变化:
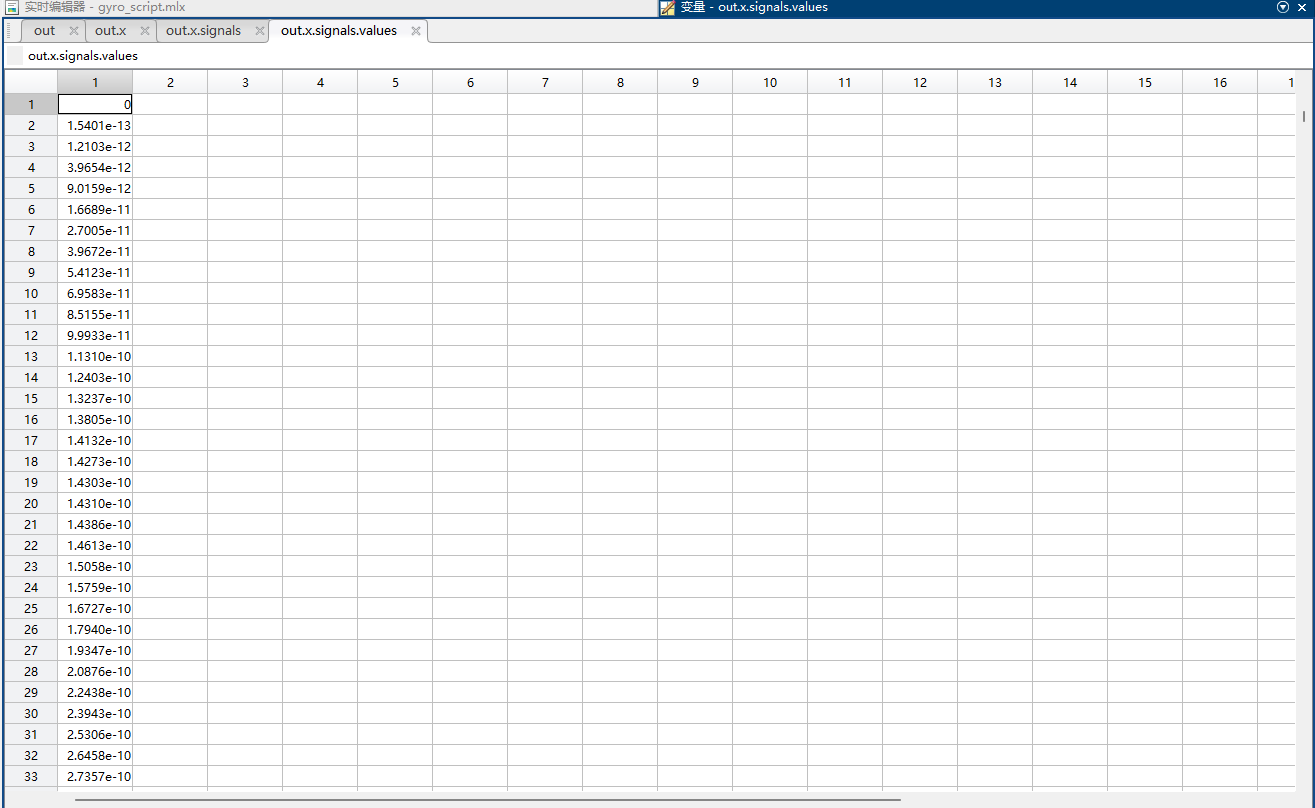
查看工作区中存储的参数及其数据类型,调用数据。
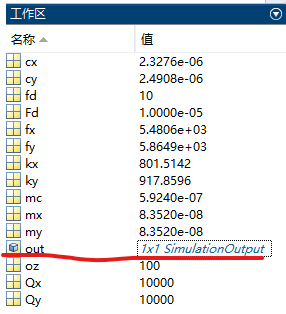
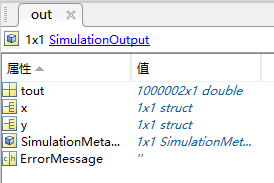
双击out查看仿真结果存储的数据内容:
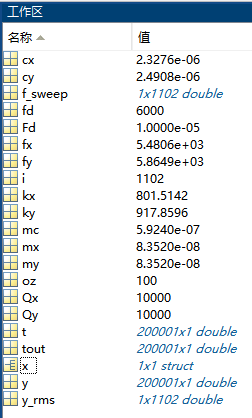
频率扫描
%frequency sweep
f_sweep = [0:100:10000, 5000:1:6000];
y_rms = zeros(size(f_sweep));
for i = 1:length(f_sweep)
fd = f_sweep(i);
sim("D:\zzy\23-1phc-gyro\matlab\gyro.slx");
t = out.y.time ;
y = out.y.signals.values ;
y_rms(i) = rms(y(t>1));
end
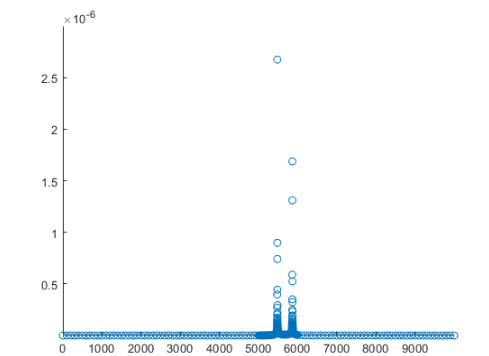
scatter(f_sweep,y_rms)
%frequency sweep
f_sweep = [0:100:10000, 5000:1:6000]; %建立一个矩阵f_sweep,设置扫描步长,f_sweep为行向量
y_rms = zeros(size(f_sweep)); %size语法获取数组的大小size(f_sweep)=(1,x)
% x为矩阵长度;zeros(*,*)需要行数和列数两个参数,创建全0矩阵。
%zeros(size(f_sweep))整体记忆,意味创建存储y_rms的全零行向量,长度和矩阵f_sweep一样。
for i = 1:length(f_sweep) %length返回值为行向量长度
fd = f_sweep(i); %MATLAB的索引是从1开始的,不是0,因此返回数组中第i个元素。
sim("D:\zzy\23-1phc-gyro\matlab\gyro.slx"); %运行一次simulink模型
t = out.y.time ;
y = out.y.signals.values ; %调用simulink仿真结果,时域的幅值。
y_rms(i) = rms(y(t>1)); %rms函数计算均方根
end
scatter(f_sweep,y_rms) %绘制散点图
仿真结果:
经验分享
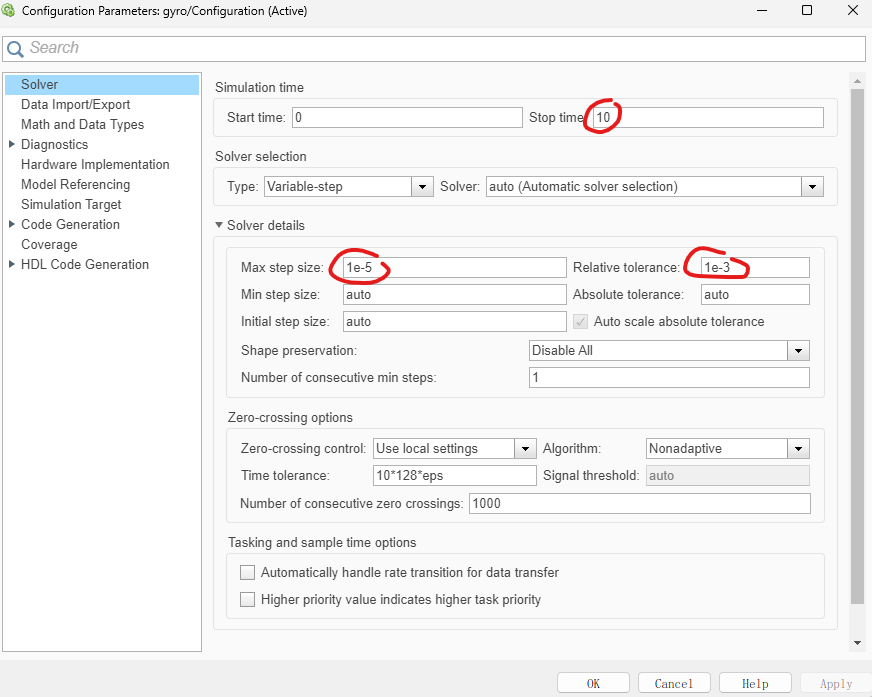
(1)合理设置仿真步长,避免波形毛刺。最大步长设置为5e-5至5e-6可以保证仿真精度。合理设置求解器,避免波形振荡。本案例中因为含有积分器,仿真前期会出现振荡,需要仿真时间久一点,波形才会稳定下来。
(2)MATLAB语法——for循环
基本语法:
for index = values
statements;
end
Index是循环变量,values是一个向量或矩阵,statements是重复执行语句块。循环变量index会从values中取出每个元素,依次执行statements语句块。
举例:打印1到5的整数
for i = 1:5
disp(i);
End
(3)去掉工作区模块out.前缀
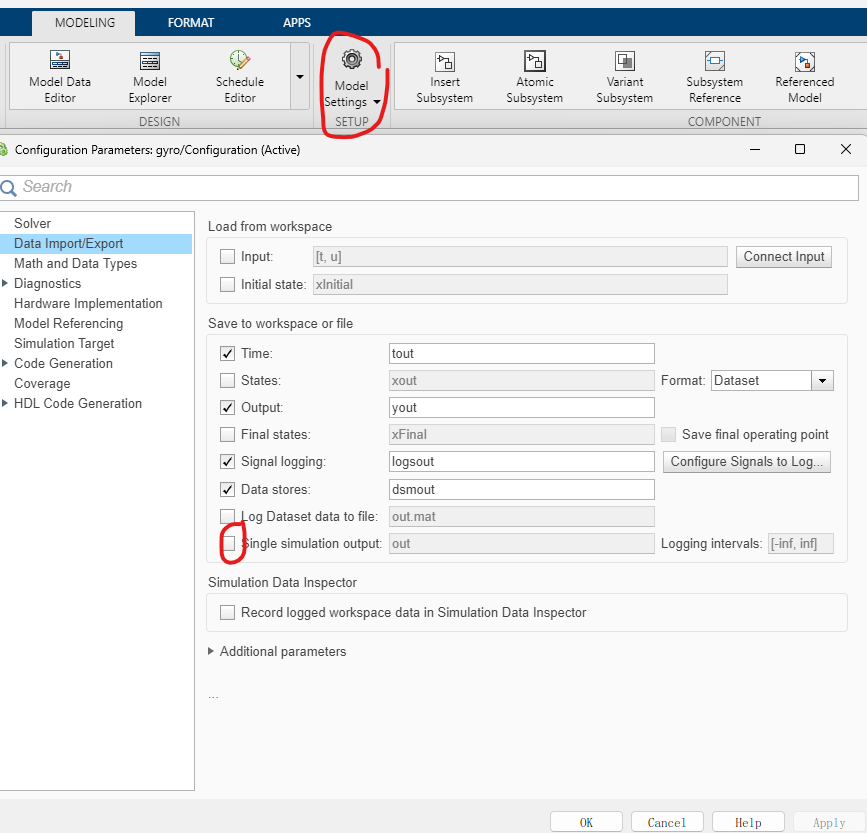
取消勾选single simulation output,工作区显示:
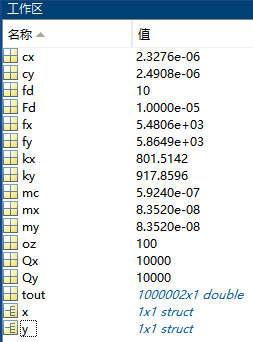 便于直接调用数据,而不用加前缀out.
便于直接调用数据,而不用加前缀out.
附录:完整代码
%parameters;
mx = 0.8e-6; %kg,驱动解耦框质量
my = 0.8e-6; %kg,检测解耦框质量
mc = 0.5e-6; %kg,科氏质量
fx = 5480; %Hz,驱动模态的特征频率,由COMSOL仿真得到
fy = 5864; %Hz,检测模态的特征频率,由COMSOL仿真得到
kx = (mx+mc)*(2*pi*fx)^2; %N/m
ky = (my+mc)*(2*pi*fy)^2; %N/m
Qx = 1000;
Qy = 1000;
cx = (mx+mc)*(2*pi*fx)/Qx ; %N/(m/s)
cy = (my+mc)*(2*pi*fy)/Qy ; %N/(m/s)
oz = 100; %rad/s 输入角速率,手动扫描,后期分析灵敏度**
Fd = 10e-6; %N 驱动振幅
fd = 10 ; %Hz驱动频率,扫描参量
%frequency sweep
f_sweep = [0:1000:10000, 5000:100:6000]; %建立一个矩阵f_sweep,设置扫描步长,f_sweep为行向量
y_rms = zeros(size(f_sweep)); %size语法获取数组的大小size(f_sweep)=(1,x)
% x为矩阵长度;zeros(*,*)需要行数和列数两个参数,创建全0矩阵。
%zeros(size(f_sweep))整体记忆,意味创建存储y_rms的全零行向量,长度和矩阵f_sweep一样。
for i = 1:length(f_sweep) %length返回值为行向量长度
fd = f_sweep(i); %MATLAB的索引是从1开始的,不是0,因此返回数组中第i个元素。
sim("D:\zzy\23-1phc-gyro\matlab\gyro.slx"); %运行一次simulink模型
t = y.time ;
y = y.signals.values ; %调用simulink仿真结果,时域的幅值。
y_rms(i) = rms(y(t>1)); %rms函数计算均方根
end
scatter(f_sweep,y_rms) %绘制散点图

 浙公网安备 33010602011771号
浙公网安备 33010602011771号