


Opencv中solvePnP函数的小结
在solvePNP中通过世界坐标系下3D点坐标,图像坐标系下2D像素坐标,相机内参和畸变矩阵就可以求出rvec和tvec;
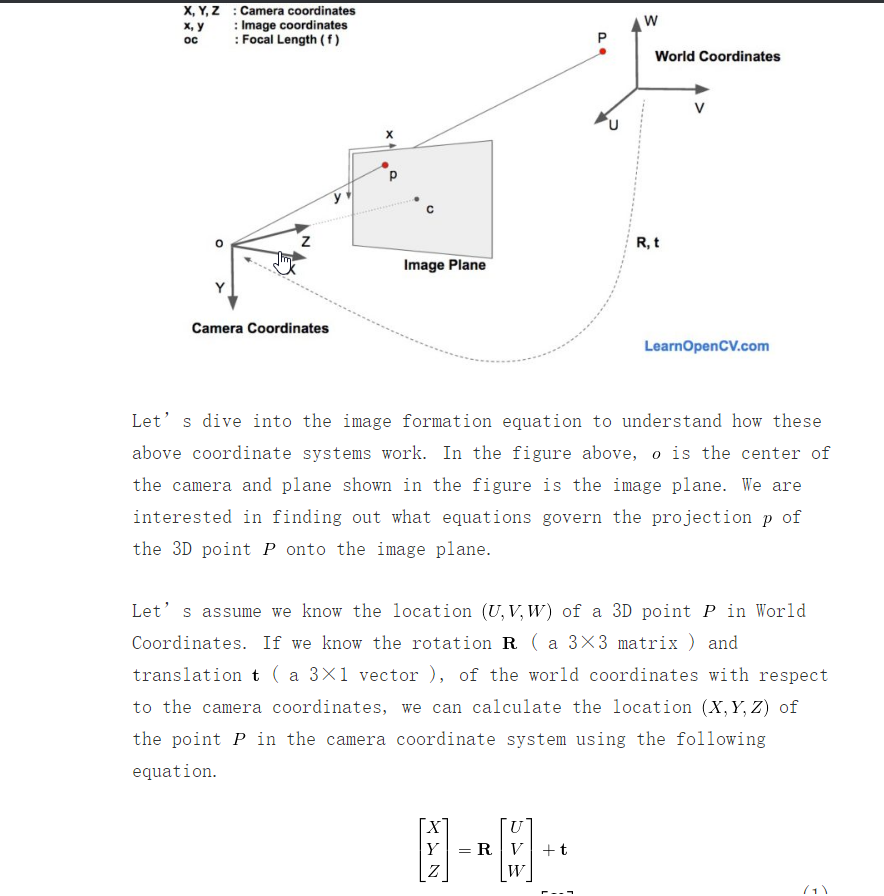
solvePnP求解的r和t是将世界坐标系下的点变换到相机坐标系所需要的旋转和平移,实际上也是相机在世界坐标系下的位姿,即R*Pw + T = Pc。
根据这个位姿,我们也可以由世界坐标系下的3D点计算对应的相机坐标系的点,再根据内参得到像素平面上的2D坐标,即projectPoints函数。
所以,r和t不是图像2D坐标和物体3D坐标之间的一个关系,而是相机坐标系(3D)和世界坐标系(3D)之间的关系。
转自:https://bbs.csdn.net/topics/392357554

 浙公网安备 33010602011771号
浙公网安备 33010602011771号