

计算视觉——图像拼接融合
- 一、全景图像拼接原理介绍
- 1.1 背景介绍
图片的全景拼接如今已不再稀奇,现在的智能摄像机和手机摄像头基本都带有图片自动全景拼接的功能,但是一般都会要求拍摄者保持设备的平稳以及单方向的移动取景以实现较好的拼接结果。这是因为拼接的图片之间必须要有相似的区域以保证拼接结果的准确性和完整性。本文主要简单描述如何用 Python 和 OpenCV 库实现多张图片的自动拼合。
-
1.2 基本原理
要实现两张图片的简单拼接,其实只需找出两张图片中相似的点 (至少四个,因为 homography 矩阵的计算需要至少四个点), 计算一张图片可以变换到另一张图片的变换矩阵 (homography 单应性矩阵),用这个矩阵把那张图片变换后放到另一张图片相应的位置 ( 就是相当于把两张图片中定好的四个相似的点给重合在一起)。如此,就可以实现简单的全景拼接。当然,因为拼合之后图片会重叠在一起,所以需要重新计算图片重叠部分的像素值,否则结果会很难看。下面是书上原图的全景拼接结果:


- 二. 图像拼接介绍图像拼接在实际的应用场景很广,小到我们手机的全景图片,大到航天领域和地理图像领域,都会用到推向拼接,图像拼接的结果好坏会直接影响接下来工作的进行。下面介绍一下图像拼接中常用的方法。
- 2.1 图像拼接步骤
针对某个场景拍摄多张/序列图像
计算第二张图片和第一张图片的变换关系
将第二张图像叠加到第一张图像的坐标系中
变换后的融合/合成
如果是多图场景,重复上述步骤
那么如何就散图像间的变换关系呢?
首先提取两幅图像的特征点并生成描述子,对两张图像进行特征匹配,然后就可以计算图像的变换结构。
图像的变换结构有位移,旋转,尺度大小变换,仿射和透视。
- 2.2 图像拼接算法
图像拼接首先进行特征点匹配,这里特征点匹配使用的是Sift特征检测。
由于图像是将三维景物显示在2D平面上,图像中的景物的三维信息丢失,所以拼接时经常会有“鬼影”的出现,例如下图:
- 三.APAP算法
APAP算法全称As-Projective-As-Possible Image Stitching,也是图像拼接算法的一种。关于APAP算法,详尽信息可以参考图像拼接之APAP算法代码详解
APAP算法流程如下:
1.提取两张图片的sift特征点
2.对两张图片的特征点进行匹配
3.匹配后,使用RANSAC算法进行特征点对的筛选,排除错误点。筛选后的特征点基本能够一一对应。
4.使用DLT算法,将剩下的特征点对进行透视变换矩阵的估计。
5.因为得到的透视变换矩阵是基于全局特征点对进行的,即一个刚性的单应性矩阵完成配准。为提高配准的精度,APAP将图像切割成无数多个小方块,对每个小方块进行单应性矩阵变换。
经过APAP算法的计算过后,上面那张原本有重叠影像的图就变成如下图像:
- 四.实验结果
- 1.针对固定点位拍摄多张图片,以中间图片为中心,实现图像的拼接融合


拼接的效果不是很好,经百度了解后得知
- 当图片模糊度高(像素值小)时,拼接会将五张图片拆成2+3两组进行拼接,拼接效果不理想;
- 图片较清晰时,以及能够实现较准确的拼接,虽然没有看到鬼影现象,但无可避免的还有过重的拼接痕迹;
- 图像本身像素对于运行时间和实验效果都有很大的影响,图像像素要适当,不能太大也不能太小。
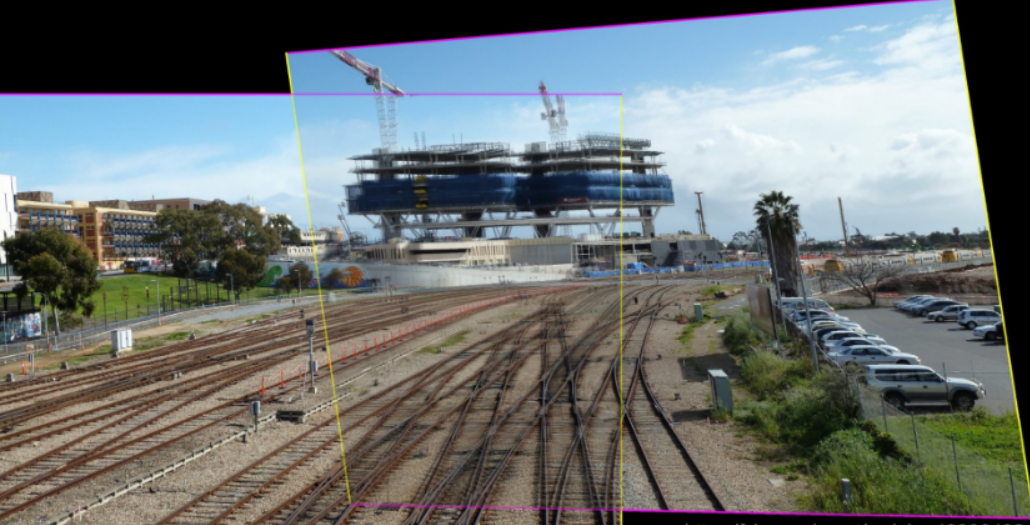
2.移动位置的拍摄


可以看到拼接的效果十分不理想。
在该场景下,近处和远处的楼房形成明显的近远景,视差变化大。观察近景目标拼接,可以看到右侧护栏处出现了明显的拼接缝,后面的建筑物出现鬼影现象,但是观察SIFT特征匹配结果,看到匹配结果基本正确。这是因为景深变化大,这时即使都是正确的匹配点,但是不能用homography 单应性矩阵表示,所以会出现鬼影等现象。
- 代码
from pylab import * from numpy import * from PIL import Image # If you have PCV installed, these imports should work from PCV.geometry import homography, warp from PCV.localdescriptors import sift import os root=os.getcwd()+"\\" """ This is the panorama example from section 3.3. """ # set paths to data folder featname = ['RANSAC-data/' + str(i + 1) + '.sift' for i in range(5)] imname = ['RANSAC-data/' + str(i + 1) + '.jpg' for i in range(5)] # extract features and match l = {} d = {} for i in range(5): sift.process_image(root+imname[i], root+featname[i]) l[i], d[i] = sift.read_features_from_file(featname[i]) matches = {} for i in range(4): matches[i] = sift.match(d[i + 1], d[i]) # visualize the matches (Figure 3-11 in the book) for i in range(4): im1 = array(Image.open(imname[i])) im2 = array(Image.open(imname[i + 1])) figure() sift.plot_matches(im2, im1, l[i + 1], l[i], matches[i], show_below=True) # function to convert the matches to hom. points def convert_points(j): ndx = matches[j].nonzero()[0] fp = homography.make_homog(l[j + 1][ndx, :2].T) ndx2 = [int(matches[j][i]) for i in ndx] tp = homography.make_homog(l[j][ndx2, :2].T) # switch x and y - TODO this should move elsewhere fp = vstack([fp[1], fp[0], fp[2]]) tp = vstack([tp[1], tp[0], tp[2]]) return fp, tp # estimate the homographies model = homography.RansacModel() fp, tp = convert_points(1) H_12 = homography.H_from_ransac(fp, tp, model)[0] # im 1 to 2 fp, tp = convert_points(0) H_01 = homography.H_from_ransac(fp, tp, model)[0] # im 0 to 1 tp, fp = convert_points(2) # NB: reverse order H_32 = homography.H_from_ransac(fp, tp, model)[0] # im 3 to 2 tp, fp = convert_points(3) # NB: reverse order H_43 = homography.H_from_ransac(fp, tp, model)[0] # im 4 to 3 # warp the images delta = 500 # for padding and translation im1 = array(Image.open(imname[1]), "uint8") im2 = array(Image.open(imname[2]), "uint8") im_12 = warp.panorama(H_12, im1, im2, delta, delta) im1 = array(Image.open(imname[0]), "f") im_02 = warp.panorama(dot(H_12, H_01), im1, im_12, delta, delta) im1 = array(Image.open(imname[3]), "f") im_32 = warp.panorama(H_32, im1, im_02, delta, delta) im1 = array(Image.open(imname[4]), "f") im_42 = warp.panorama(dot(H_32, H_43), im1, im_32, delta, 2 * delta) figure() imshow(array(im_42, "uint8")) axis('off') savefig("quanjing.png", dpi=300) show()
- 总结
1.为了拼接出效果比较好的图像,在保证有相同匹配点的情况下,拍摄图像的间隔尽可能不要太小,如果太小会导致拼接出来的结果与原图没有太大差别,丧失拼接图像的意义。但如果间隔太大可能会导致匹配点较少而拼接失败。且一定要站在同一点,水平移动手机进行拍摄,就像拍摄全景图那样。若人拍摄的位置发生移动的话,算法可能就会因为找不到正确的点对而报错。
2.在给图像编号进行测试时,一定要从右往左进行编号,因为我们的算法的匹配是从最右边的图像计算出来的,代码中有一步骤是将对应的顺序进行颠倒,使其从左边图像开始进行扭曲。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号