jzoj4380【GDOI2016模拟3.11】矩形
Description
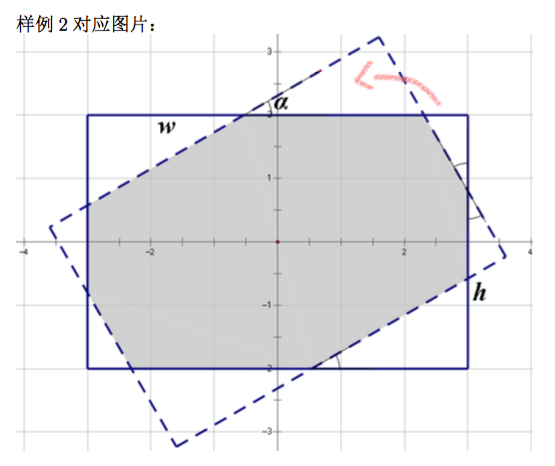
有一个w*h的矩形,它两边与坐标轴平行,且矩形中心与坐标原点重合。
现将它沿原点逆时针旋转a度产生一个新的矩形,求这个新矩形与原矩形相交的面积。
详见对应样例2的图片。
Input
第一行三个整数w,h,a。
Output
一个实数表示两个矩形相交的面积。
Solutions
暴力出旋转之后的矩形与原矩形所有交点,
分两种情况:8个交点和4个交点,
特判一下90°和180°就OK了。
代码
1 uses math; 2 var 3 w,h,aa:int64; 4 x1,y1,x2,y2,k,b,op,po:array [1..4] of real; 5 function min(o,p:longint):longint; 6 begin 7 if o<p then exit(o); 8 exit(p); 9 end; 10 11 procedure main; 12 var 13 i:longint; 14 num,top1,top2:int64; 15 a,ty,s,xx,yy,t,tk,s1,s2,xo,yo:real; 16 begin 17 ty:=aa; 18 a:=aa*3.1415926535/180; num:=0; top1:=0; top2:=0; 19 x1[1]:=-w/2; x1[2]:=-w/2; x1[3]:=w/2; x1[4]:=w/2; 20 y1[1]:=h/2; y1[2]:=-h/2; y1[3]:=-h/2; y1[4]:=h/2; 21 xx:=-w/2; yy:=h/2; 22 if a>90 then a:=(180-ty)*3.1415926535/180; 23 k[1]:=tan(a); k[2]:=-1/tan(a); 24 k[3]:=tan(a); k[4]:=-1/tan(a); 25 ty:=ty*3.1415926535/180; xo:=0; yo:=0; 26 for i:=1 to 4 do 27 begin 28 x2[i]:=x1[i]*cos(ty)-y1[i]*sin(ty); 29 y2[i]:=x1[i]*sin(ty)+y1[i]*cos(ty); 30 b[i]:=y2[i]-k[i]*x2[i]; 31 if x2[i]<=x1[1] then xo:=x1[1]-x2[i]; 32 if y2[i]>=y1[1] then yo:=y2[i]-y1[1]; 33 if ((yy-b[i])/k[i]>=xx) and ((yy-b[i])/k[i]<=xx+w) then 34 begin 35 inc(num); 36 inc(top2); po[top2]:=(yy-b[i])/k[i]; 37 end; 38 if ((yy-b[i]-h)/k[i]>=xx) and ((yy-b[i]-h)/k[i]<=xx+w) then inc(num); 39 if (k[i]*xx+b[i]<=yy) and (k[i]*xx+b[i]>=yy-h) then 40 begin 41 inc(num); 42 inc(top1); op[top1]:=(k[i]*xx+b[i]); 43 end; 44 if (k[i]*(xx+w)+b[i]<=yy) and (k[i]*(xx+w)+b[i]>=yy-h) then inc(num); 45 end; 46 if num=8 then 47 begin 48 if op[1]>op[2] then t:=op[1]-op[2] 49 else t:=op[2]-op[1]; 50 if po[1]>po[2] then tk:=po[1]-po[2] 51 else tk:=po[2]-po[1]; 52 s1:=t*xo; s2:=tk*yo; 53 s:=w*h-s1-s2; 54 end else 55 if top1>0 then 56 begin 57 if op[1]>op[2] then t:=op[1]-op[2] 58 else t:=op[2]-op[1]; 59 s:=t*w; 60 end else 61 begin 62 if po[1]>po[2] then t:=po[1]-po[2] 63 else t:=po[2]-po[1]; 64 s:=t*h; 65 end; 66 writeln(s:0:9); 67 end; 68 69 begin 70 readln(w,h,aa); 71 if aa mod 90=0 then 72 begin 73 if aa=90 then writeln(min(w,h)*min(w,h)) 74 else writeln(w*h); 75 end else 76 main; 77 end.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号