统计学习方法笔记
统计学习方法
1.3 统计学习方法的三要素
1.3.1 模型
好,为什么要从1.3开始呢,因为看前面的课,我还没有用到这个软件。
方法=模型+策略+算法
模型有好多个,试试
策略:按照什么样的准则去选取模型
比如说看预测值和真实值差值有多大,或者损失函数最小等
算法 即怎样去实现去寻找这个模型
决策模型
比如房价预测,我输入x,他就会给出一个房价的预测值
条件概率模型
比如我给一张图片,他就会给出属于猫的概率为多少,属于狗的概率为多少
最后呢,我用argmax函数就可以得出属于哪一类了
1.3.2策略
损失函数和风险函数
首先引入损失函数与风险函数的概念。损失函数度量模型一次预测的好坏,风险函数度量平均意义下模型预测的好坏。
损失函数,有误差平方和,等等
平均损失函数
好的,上面这个不用,因为我们知道分布,还要机器学习干什么。
我们用这个 经验损失
当样本足够大时,这俩就差不多了。上面这个就是 损失函数 加起来求平均。L 就是损失函数
在应用中,样本是有限的,所以我们要对平均误差进行矫正。例如正则化什么的,我现在还不会。
经验风险最小化和结构风险最小化
经验风险最小化
当样本数量少,或者易出现过拟合
我们采用结构风险最小化 ,
, 加一项正则化项
加一项正则化项
对于概率分布的损失函数有
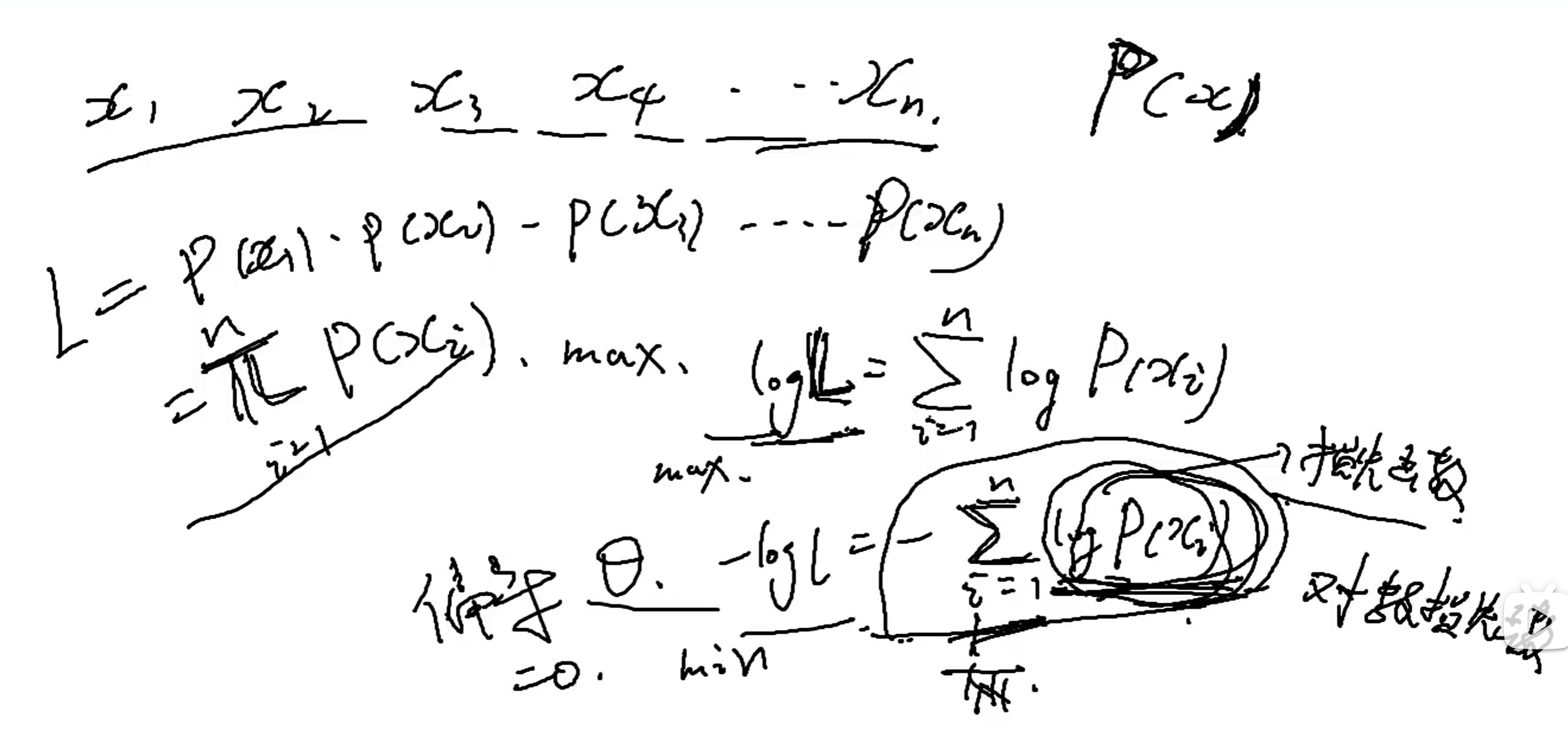
对于这个可以再去别的地方学学
1.3.3算法
算法就是学习模型的具体计算方法。通过算法可以找到最合适的模型
1.4 模型评估与选择
1.4.1 训练与测试误差
训练误差
测试误差
可以理解为考试,在平常的小测试当中,一直做题,做了很多编后,得分很高,但是到了期末考试就,考的很差了,这就是为什么要用到测试误差。
1.4.2过拟合
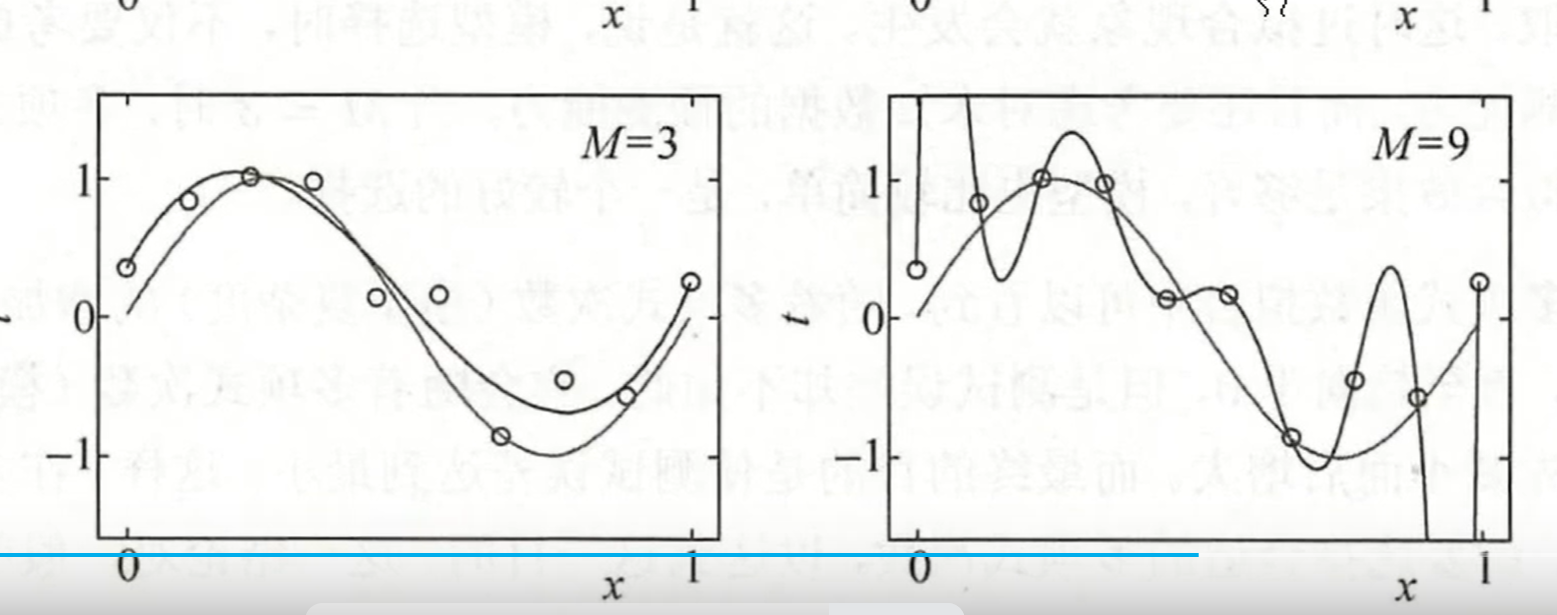
过拟合:是指模型过于复杂,对训练集训练的太好,反而应用到测试集,效果不怎么理想
1.5 正则化与交叉验证
1.5.1 正则化
这里知道正则化是干什么的就可以
后面会说到
用来解决过拟合问题
正则化项一般是模型复杂度的单调递增函数,模型越复杂,正则化值就越大
第二项就是正则化项
第二项还可以是以下形式
范数是指
第一行是二范式,就是平方和开根号,第二行是一范式,就是绝对值的和。
为什么正则化会降低过拟合呢。
因为我们引入正则化参数后,整体损失函数,就要考虑到是正则化这一项的值也尽可能的小,而例如正则化参数的取值在一个单位圆或者正方形内,这就导致了其他的参数取值必须符合正则化参数的范围。当然这也会导致准确性降低。
而且正则化在参数更新上会更平滑,在求解过程中,正则化使得训练模型没那么的贴近训练数据,只是贴近训练数据,虽然这看起来,训练效果降低了,但是若是应用在实际当中,过拟合的那个函数反而会效果更差。过拟合的那个太拟合了,把好多噪声都拟合进去了,而正则化虽然有点偏离,但是恰巧的是,刚好有时候也避开了噪声点。
1.5.2 交叉验证
将数据分成S分,取S-1份为训练集,剩下的为测试集。结束后,再取另外的S-1份为训练集,再应用另一个剩下的作测试集。
1.6 泛化能力
1.6.1 泛化误差
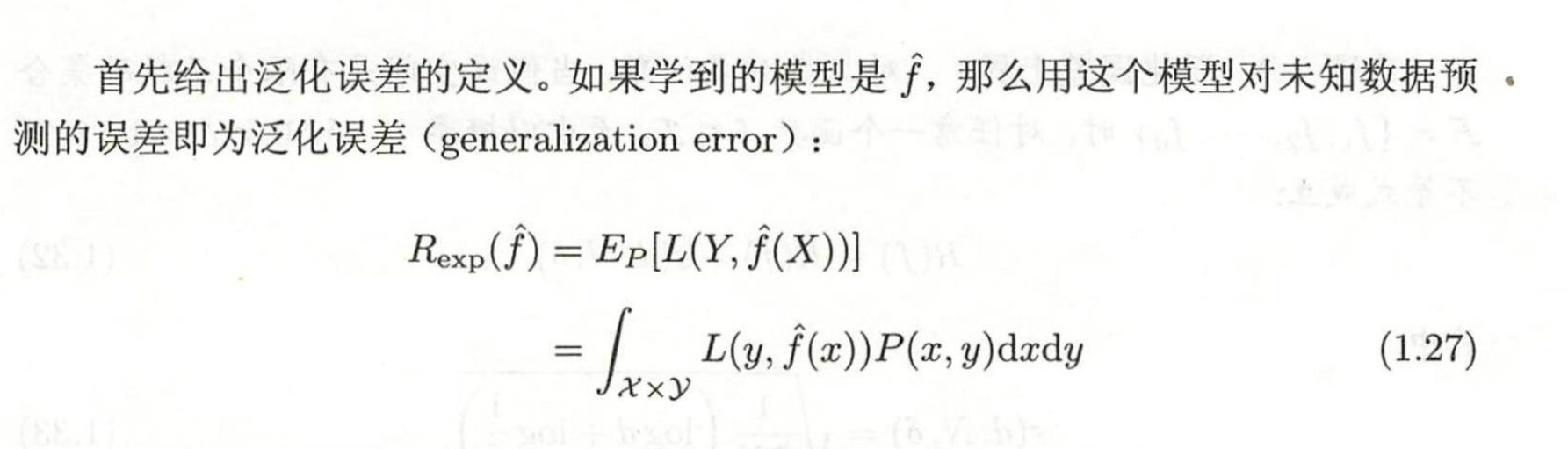
泛化能力是指系统对未知数据的预测能力。
泛化误差
当然这个不太好得到,积分形式,可用泛化误差上界来考虑,然后泛化误差上界越小,则模型越好。
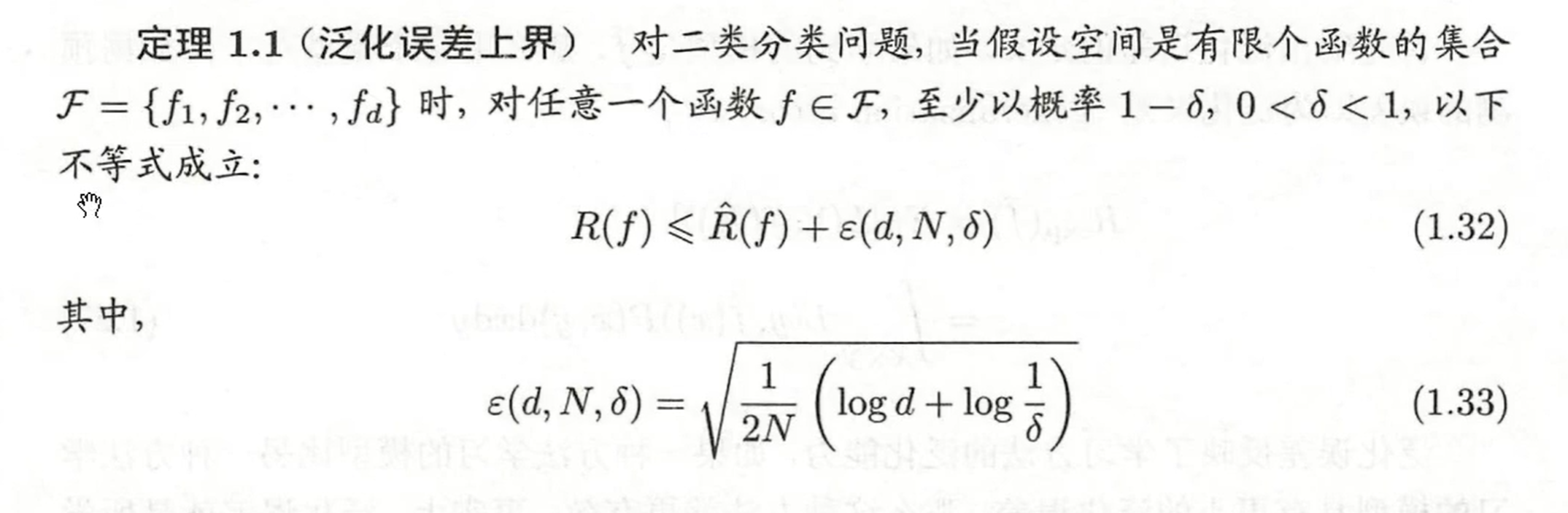
1.6.2 泛化误差上界
就是看模型的误差范围小于多少
性质:

推到先不看了,不会
1.7 生成模型与判别模型
生成模型 假设样本不同,分别带到各自模型,谁的概率大,就选谁
判别模型就直接判别ok了
1.8 监督学习
1.8.1 分类问题
分类器判断指标 准确率
二分类分类器的指标是 精确率和召回率
2.1 感知机
感知机是一个二分类线性模型,即输出为实例的类别,一般为其中一类称为正类(+1)(+1),另一类称为负类(−1)(−1)。可以把上图所示的男孩(+1)(+1)称为正类,女孩(−1)(−1)称为负类。
感知机模型是最基础的,是判别模型
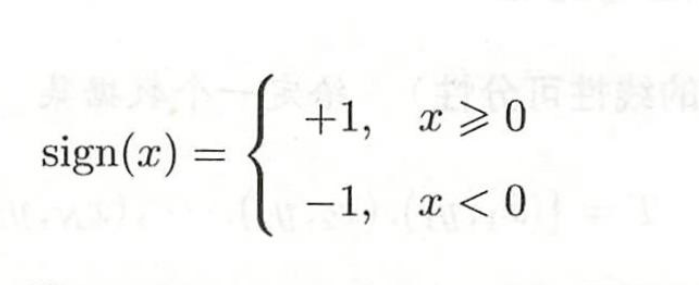
其输出为+1,-1。 其形式为wx+b,其中w是权重和b是偏置
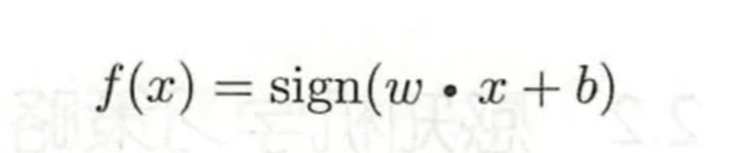
外套了一个sign函数
感知机的假设空间就是

假设空间其实挺吓人的,其含义就是这个函数所有的取值,即不同的w和b,组成的函数空间。
wx+b带入等于零的那个线称为超平面
2.2 感知机学习策略
2.2.1 线性可分和非线性可分
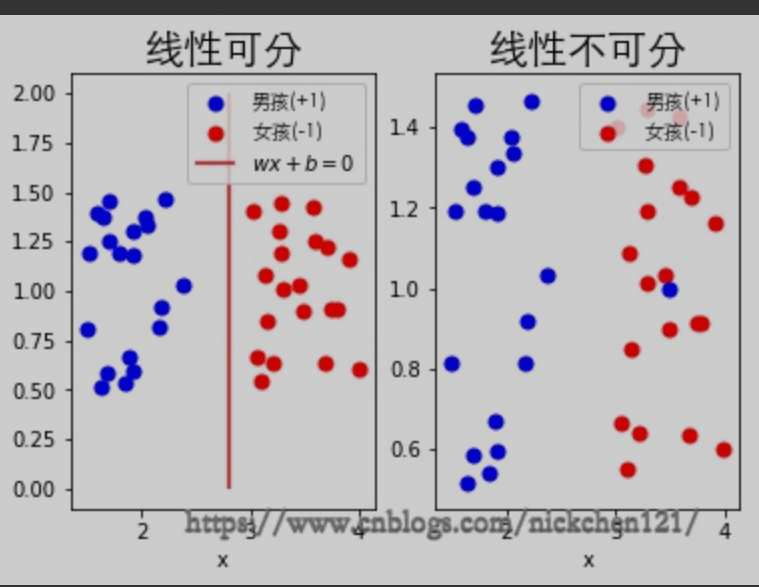
左图可以找到一条直线,即超平面 将这数据集可以完全分开,称为线性可分。而右图,右边女孩混入几个男生,找不到一条超平面将他们分开,则称为非线性可分
2.2 感知机的损失函数 (策略)
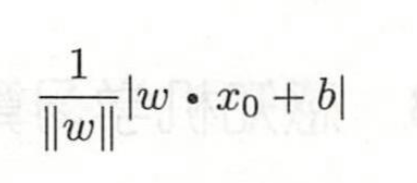
把误分类的点到超平面的距离作为损失函数
距离公式为
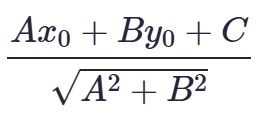
该距离公式源自于数学中点(x0,y0)(x0,y0)到面Ax+By+C=0Ax+By+C=0的公式
这里的分布是指第二范式
进一步变换为
这里yi加上了标签,
然后对所有损失求和
我们可以把分母忽略掉,为什么呢,因为有证明,忽略掉更好计算虽然有影响但是很少。
2.3 算法
然后用梯度下降法去对w,b进行更新
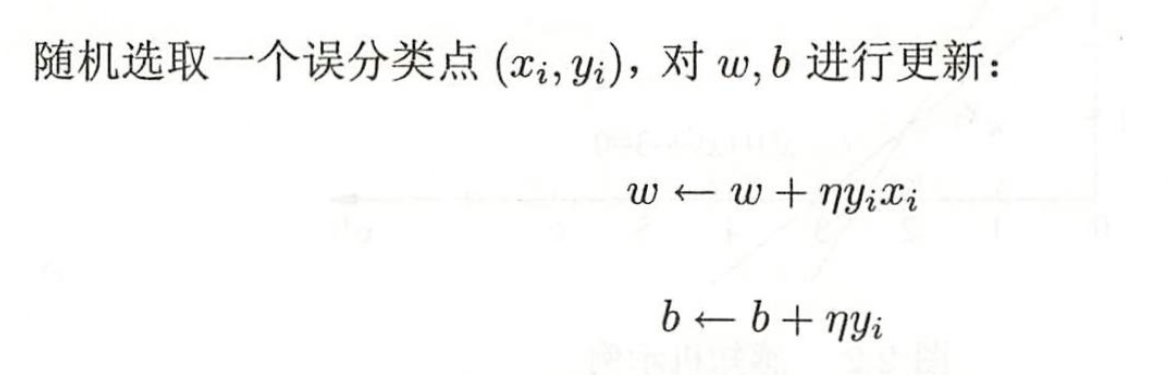
η是学习率
感知机学习算法的原始形式为
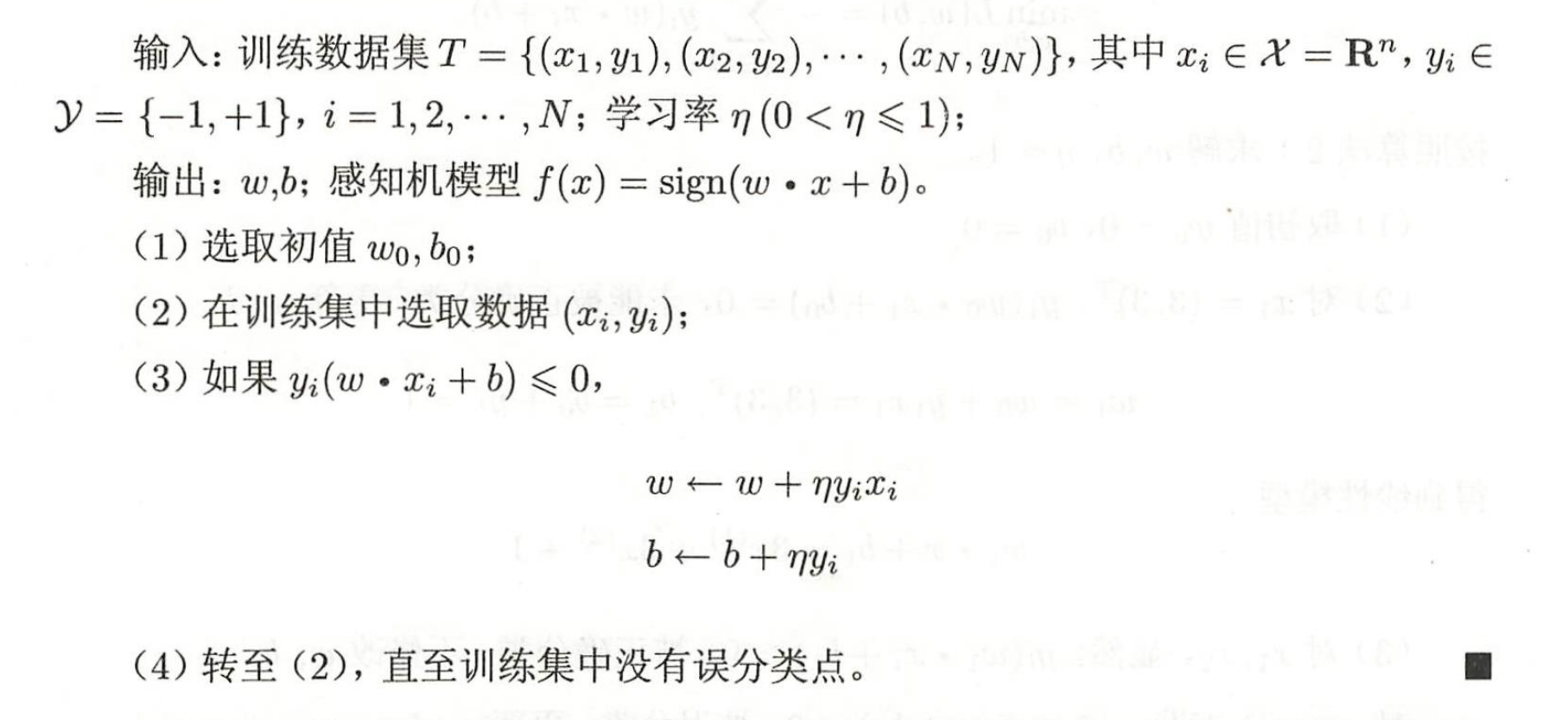
在感知机算法中,我们通过调整参数来纠正当前的误分类点,使其能够正确分类,但这个调整有可能会影响到之前已经正确分类的点,导致它们变成新的误分类点。(后面有个b站视频例子,里面有一个计算过程中就出现了,忘记的化可以看一看)这种现象在感知机算法中被称为“震荡”现象,尤其是在训练数据不能被线性分割的情况下(即数据集不可分的情况),这种情况更为常见。
这种学习算法可以理解成,当实例点被误分类后,则调整ω的值,使超平面向靠误分类点的一侧移动,因此减少该误分类点与超平面间的距离,直至超平面越过该误分类点将其分类正确;当实例点分类正确,则不会更新ωω。
2.3.1 感知机的对偶形式
通过随机梯度下降算法可以得到了一个较好的感知机模型,但是如果样本特征较多或者误分类的数据较多,计算将成为该算法的最大的一个麻烦,接下来将介绍计算量较少的感知机最小化目标函数的对偶形式,通过该方法,将极大地减少计算量。
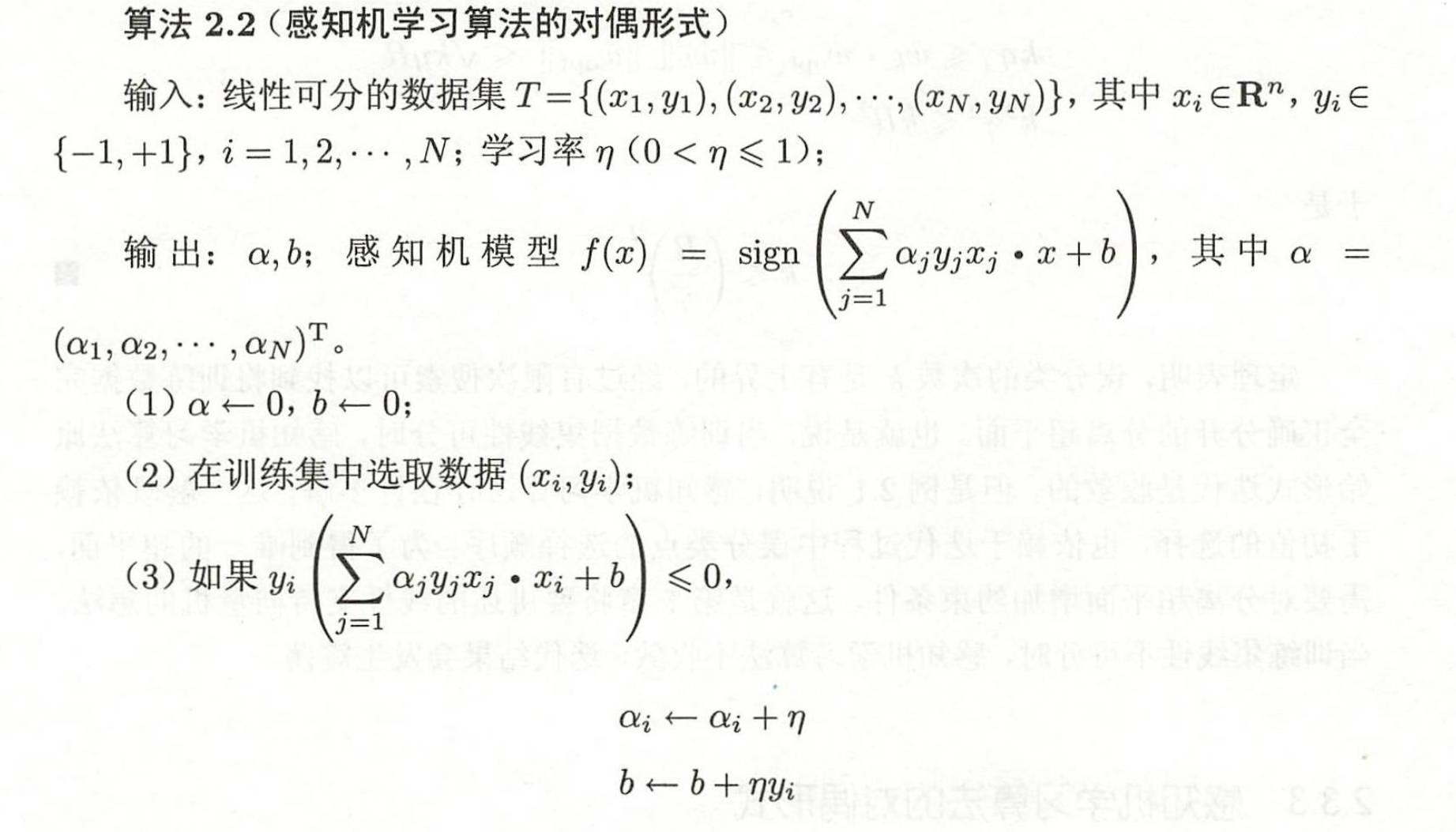
这里的α的迭代
迭代就是多加一次学习次数,相当于原来的多加一次步长
有一个例子 2.3-感知机学习算法 2.3.3-感知机算法的对偶形式 02_哔哩哔哩_bilibili
可以去看看

 浙公网安备 33010602011771号
浙公网安备 33010602011771号