planning algorithms chapter 3
chapter 3 几何表示和变换
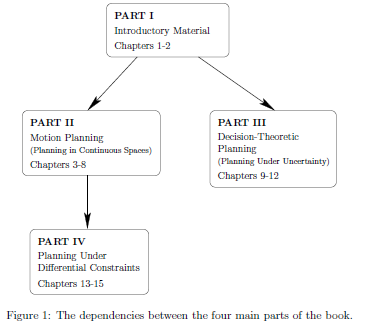
P.S: 总算到了 motion planning 部分了
几何建模
几何建模主要有两类方法:边界表示法和实体表示法。
环境模型可以是二维或三维,实体主要包括障碍物和机器人。
多边形和多面体模型
凸边形定义:子集 $ X \subset \mathbb{R}^{n} $ 为凸集,当且仅当, X 中任意两点连线上的所有点也属于 X 。
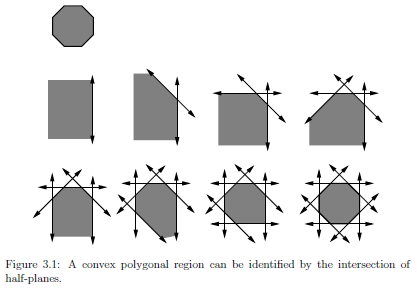
边界表示法可以用多边形表示,用一系列的边界点\(\left ( x_{1}, y_{1} \right ),\left ( x_{2}, y_{2} \right ),\cdots ,\left ( x_{m}, y_{m} \right )\)表示。实体表示法可以用半平面的交集表示。
半平面可以表示如下:
\(H_{i} = \left \{ \left ( x,y \right )\in W| f_{i}\left ( x,y \right )\leqslant 0\right \}.\)
刚体变换
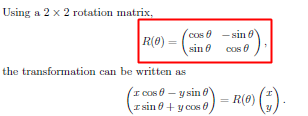
2D 变换
旋转:
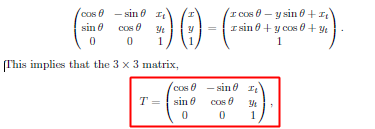
旋转 + 移动:
3D 变换
yaw, pitch, roll:
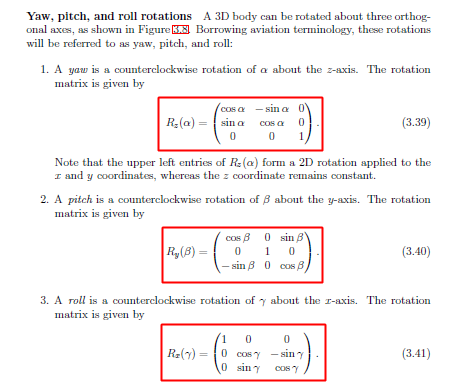
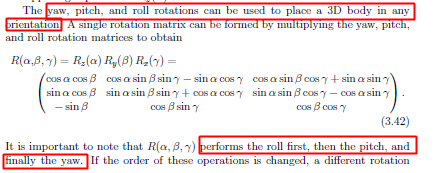
旋转变换:
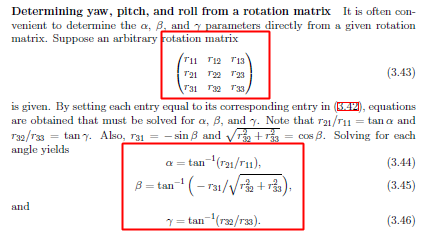
反解旋转角:
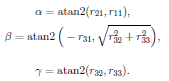
利用 atan2 可以得到:
均质变换矩阵(The homogeneous transformation matrix):
刚体运动链的变化
相互依附的刚体的变化更加复杂,一系列依附的刚体被称为联动,如果刚体通过单链关联,这种联动是运动链。
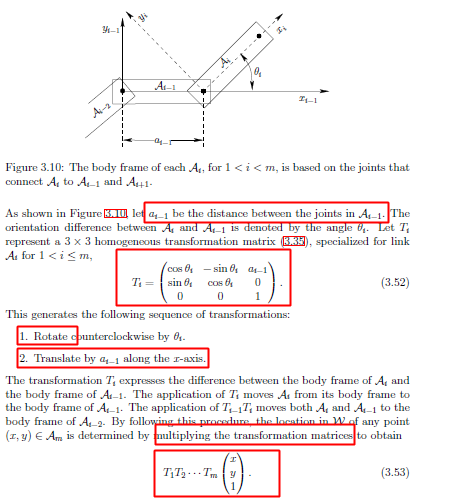
2D 运动链的均质变换:
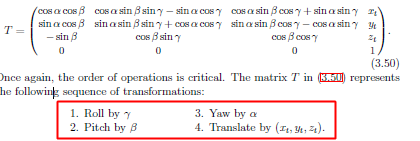
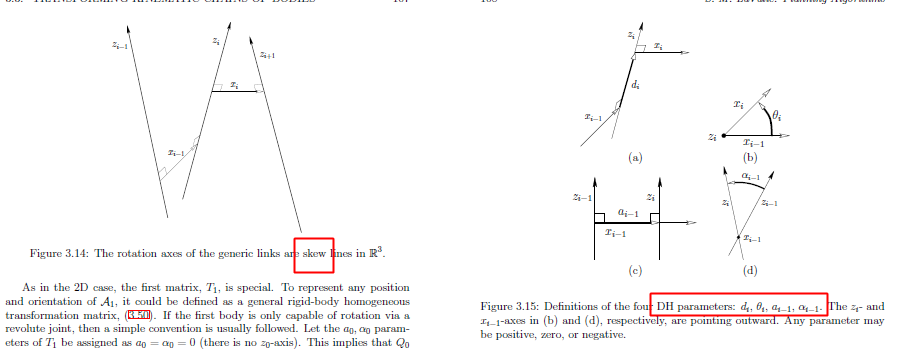
3D 运动链的均质变换:
图示:
均质变换矩阵:
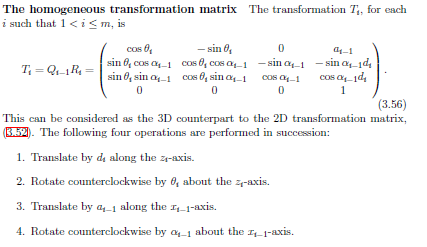
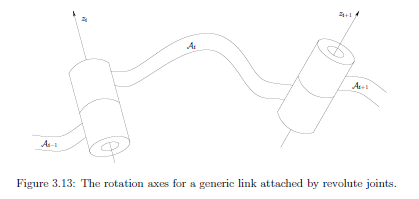
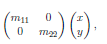
均质变换矩阵的 DH 参数
非刚体变换
线性变换:
旋转变换是一种特殊的线性变换。
同比例放大缩小:
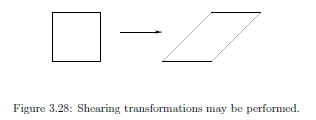
剪切变换:
当 m12 = 1 时,剪切变换效果如下图:
不要高估三年后的自己,更不要低估十年后的自己。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号