会员
众包
新闻
博问
闪存
赞助商
HarmonyOS
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
zsw2024
博客园
首页
新随笔
联系
订阅
管理
机器人动力学-上交桂凯博士-睿慕课
1.1 绪论
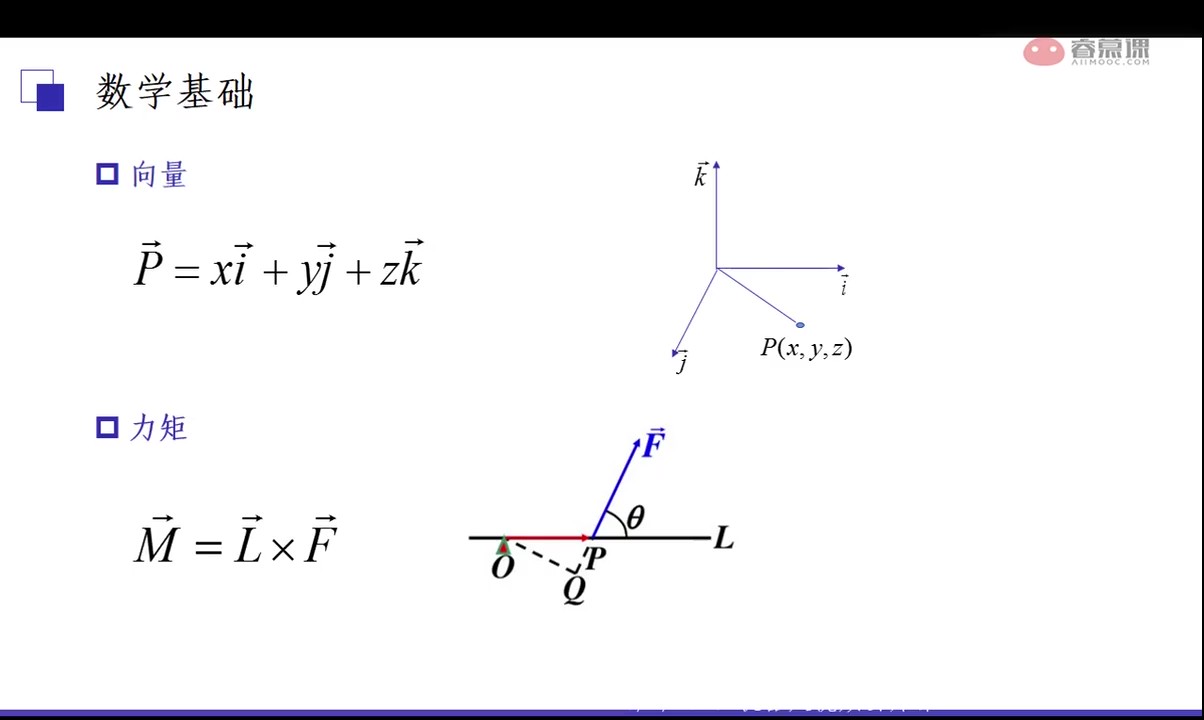
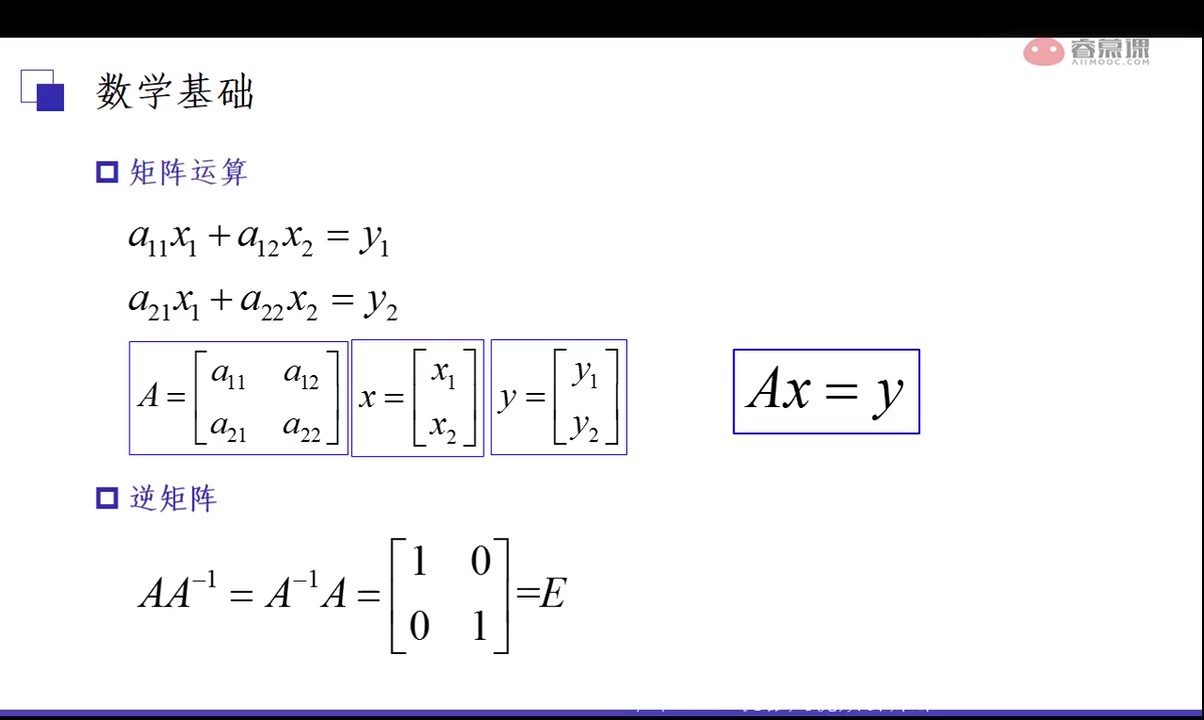
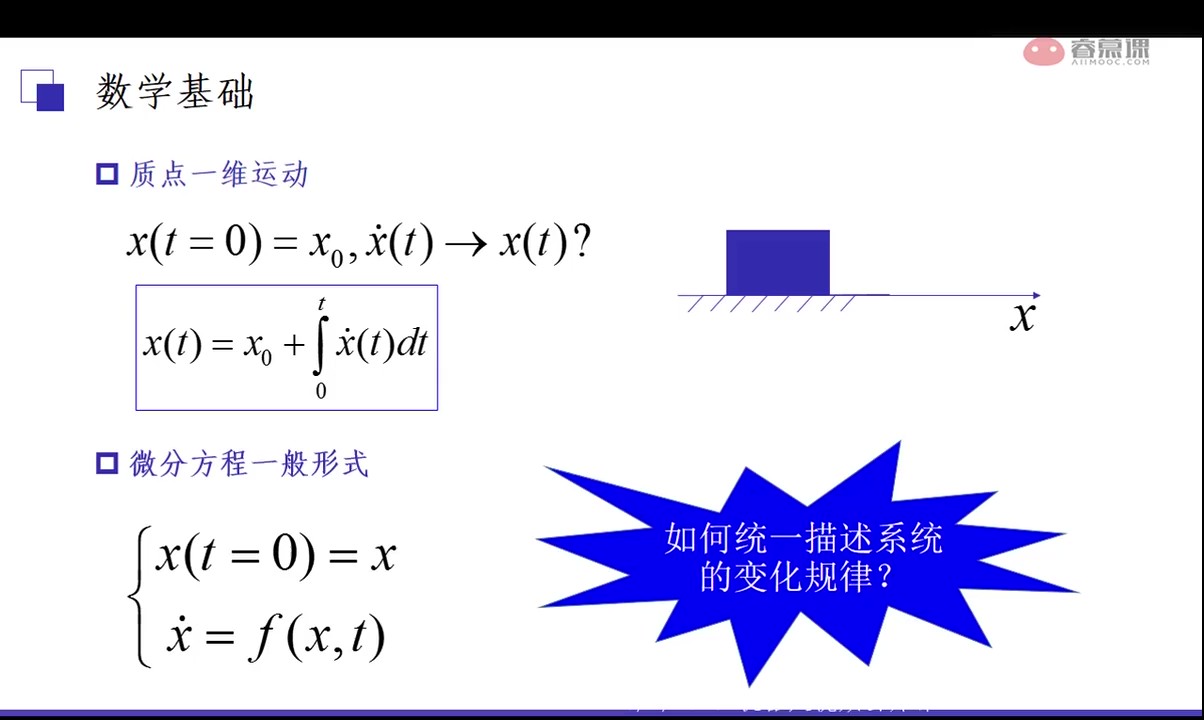
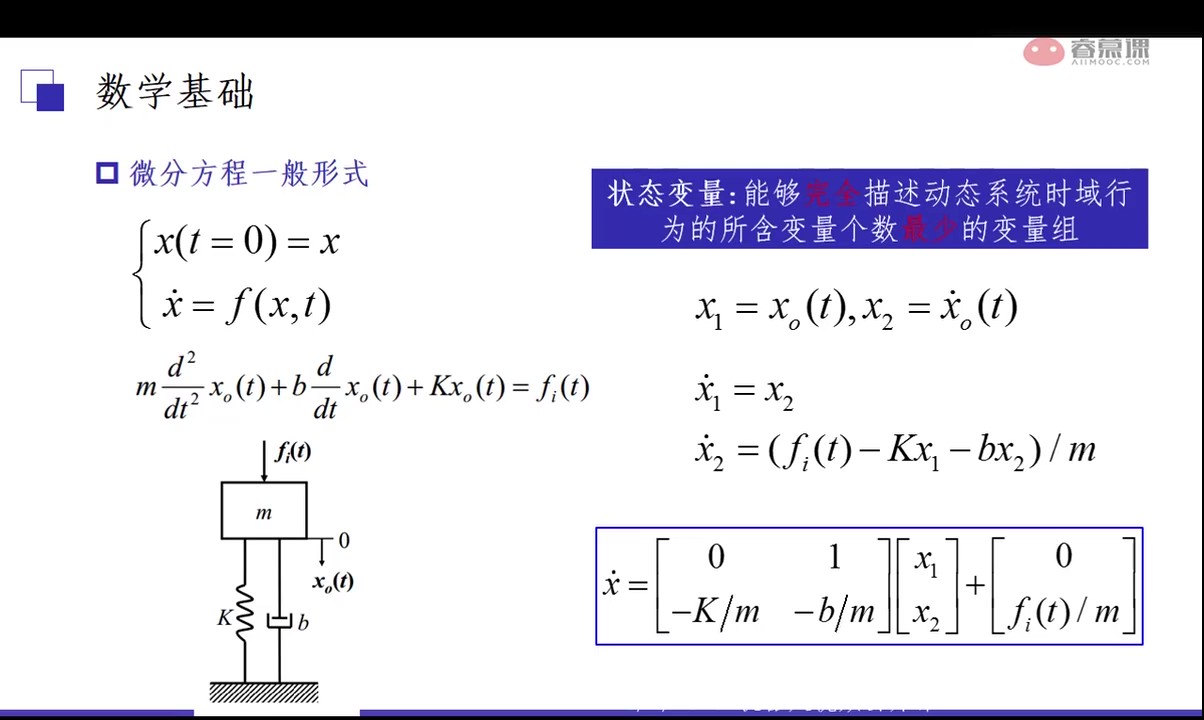
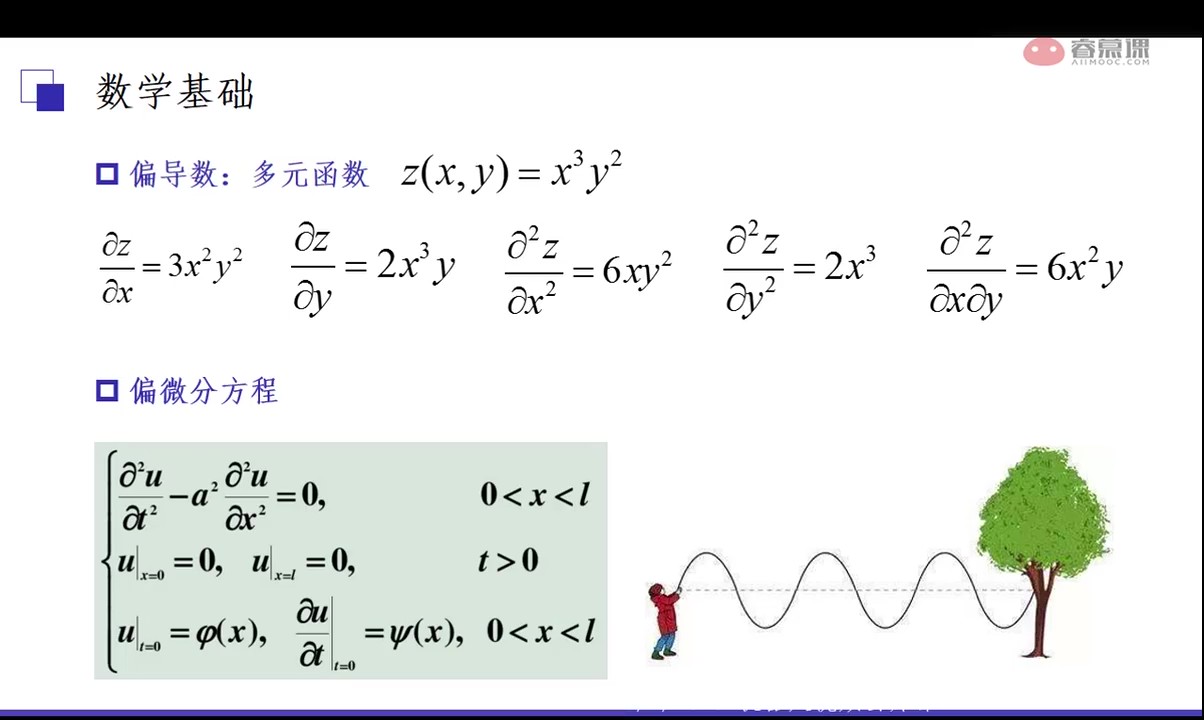
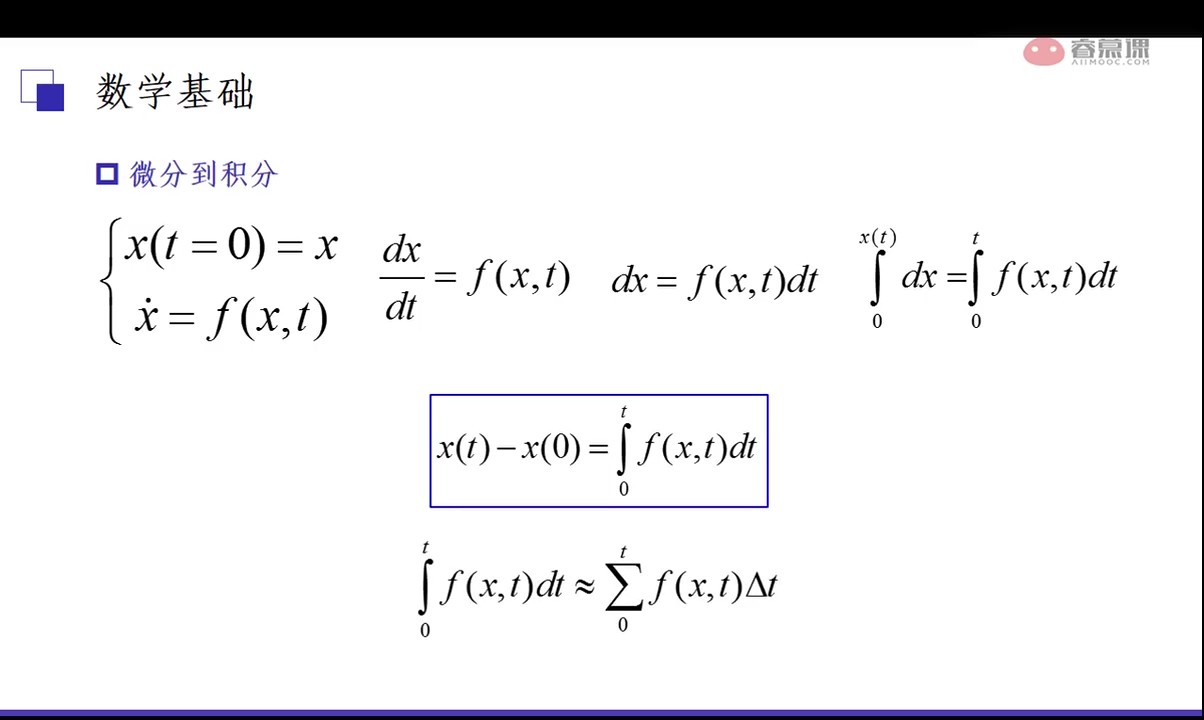
1.2 数学基础
已知系统的初始状态+速度->未来的变化状态均可知
质量弹簧阻尼二阶系统也可以写成微分方程的形式,状态变量为位置,速度
2 动力学系统建模
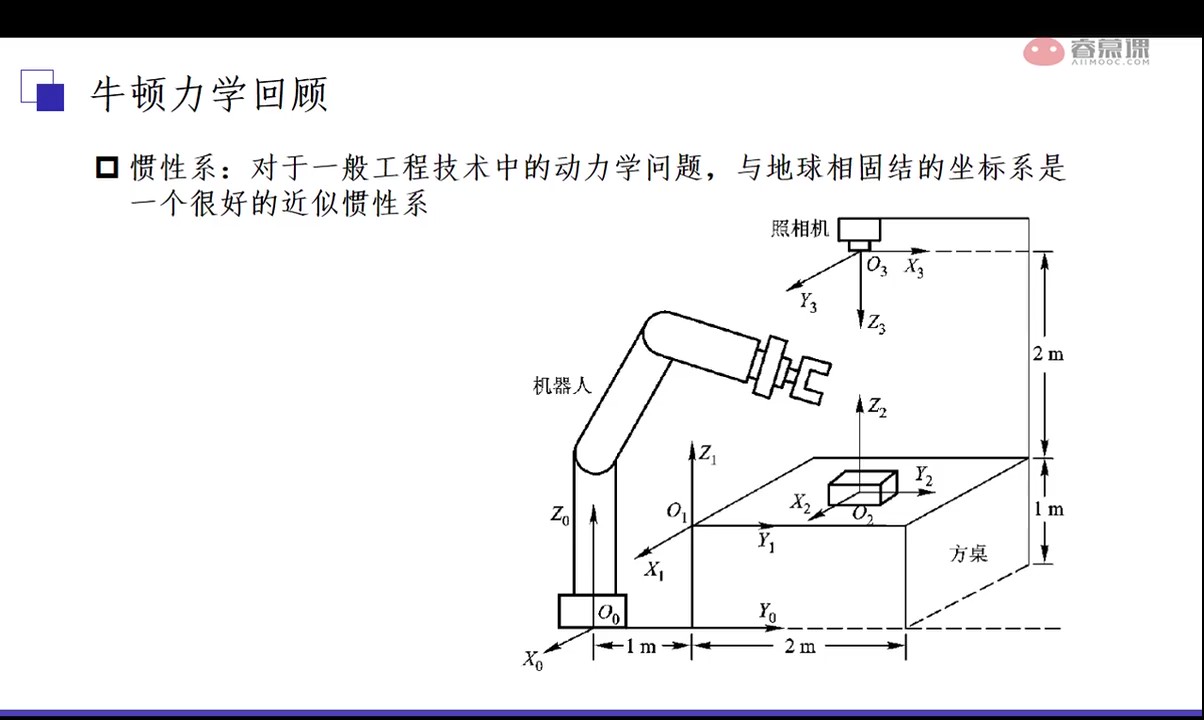
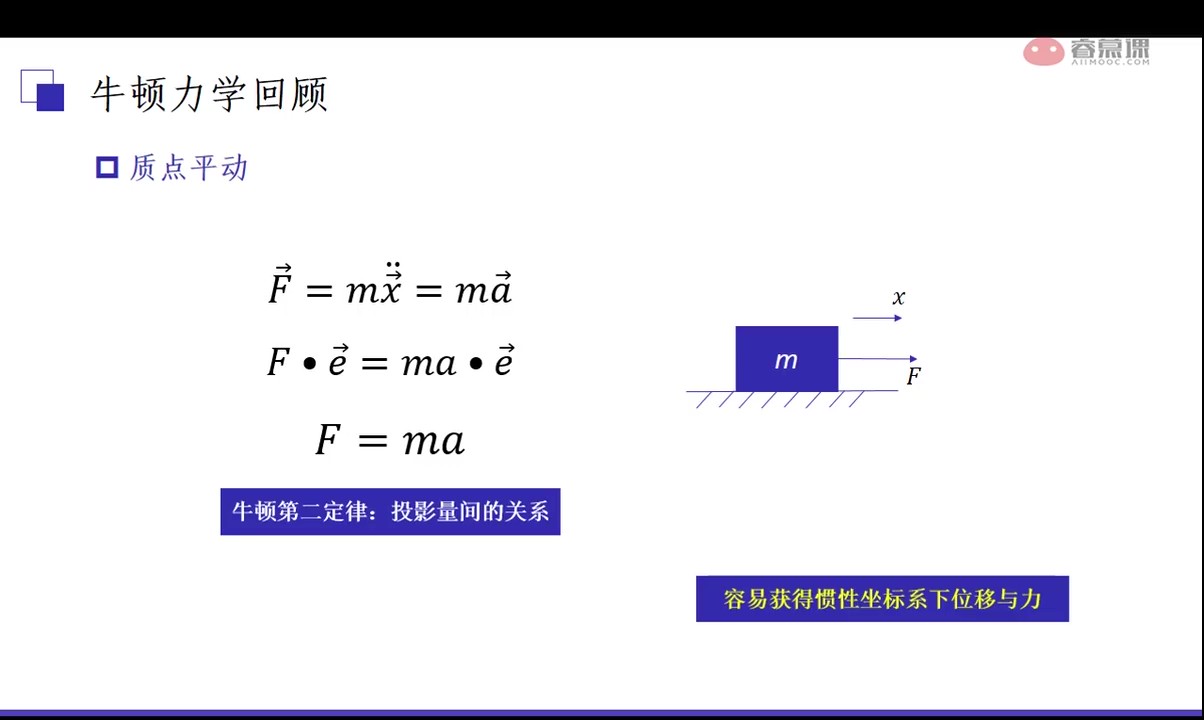
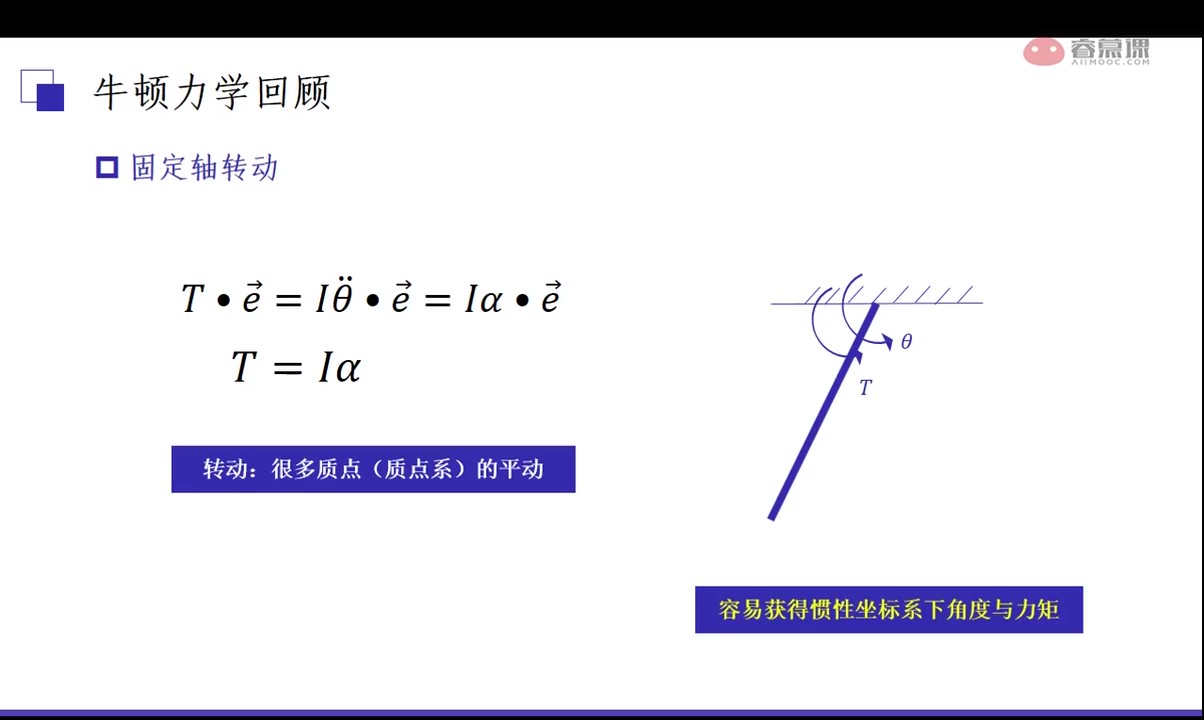
2.1 理论力学回顾
2.2 连杆动力学
posted @
2025-09-15 21:47
gravityzzz
阅读(
10
) 评论(
0
)
收藏
举报
刷新页面
返回顶部
公告

























 浙公网安备 33010602011771号
浙公网安备 33010602011771号