KinectFusion解析
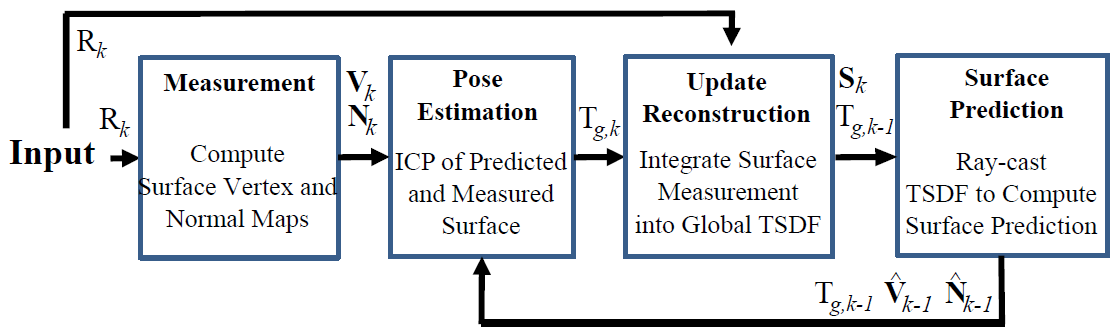 图1: KinectFusion整体算法流程。
图1: KinectFusion整体算法流程。
1. 原始数据的处理
流程和公式如图2所示。先对原始深度图\(R_k\)进行滤波降噪,这里选择双边滤波,目的是保持清晰的边界。一般的滤波是在空间域做加权平均,像素越靠近中心点,权重越高。双边滤波是在空间域加权平均的基础上再对值域加权平均,即像素灰度值越靠近中心像素的灰度值,权重越高。在边界附近,灰度值差异很大,所以虽然边界两边的像素在空间域靠在一起,但是由于灰度值差别非常大,对于互相的权重很低,所以可以保持清晰的边界,如图3所示。
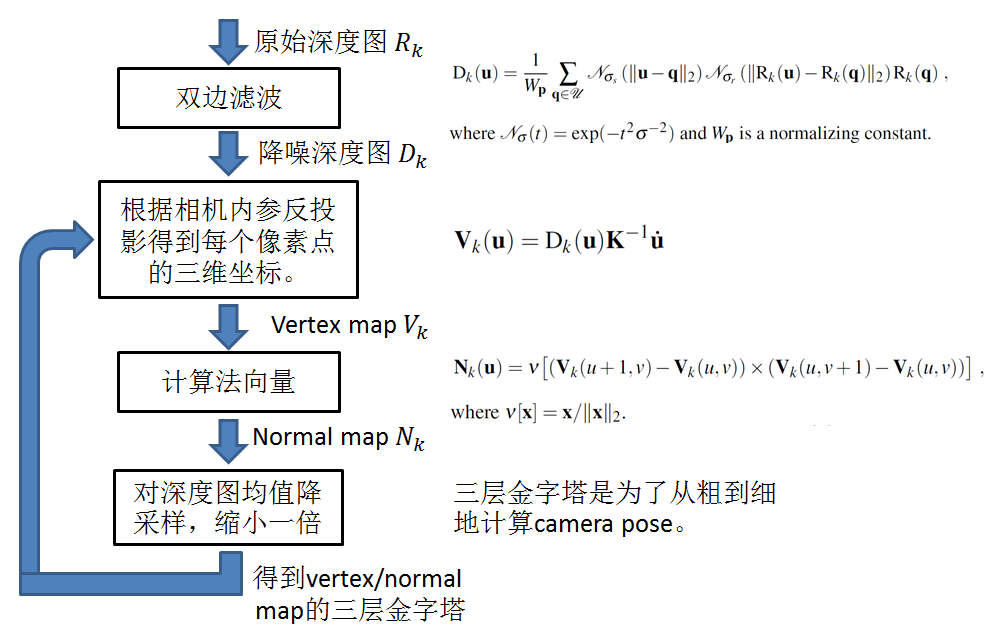 图2:原始数据处理流程。
图2:原始数据处理流程。
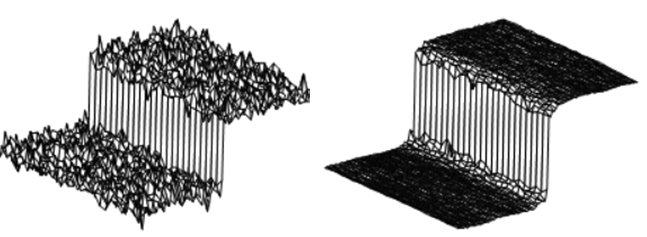 图3:双边滤波器。
图3:双边滤波器。
2. 相机位置姿态的估计
相机的位置姿态是用ICP (Iterative Closest Point) 求解的。ICP是处理点云的常规手段,通过最小化两块点云的差别,迭代求解出拍摄两块点云的相机之间的相对位置。有不同的方式来描述点云的差别,最常用的是point-to-point和point-to-plane两种。KinectFusion选择的是point-to-plane的方式,要把点到点的距离向法向量投影,如图4所示。2001年的一篇论文[3]详细比较了point-to-point和point-to-plane的效果,结论是point-to-plane要比point-to-point收敛速度快很多,而且更鲁棒。图5列出了[3]中的Figure15和16,比较了在两种点云形貌的情况下不同ICP的收敛速度和残差。
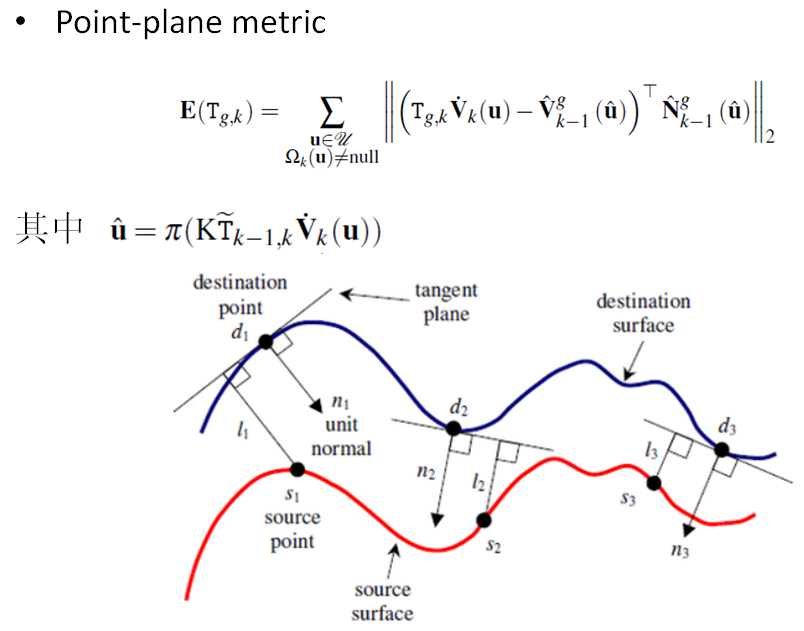 图4:Point-to-plane ICP.
图4:Point-to-plane ICP.
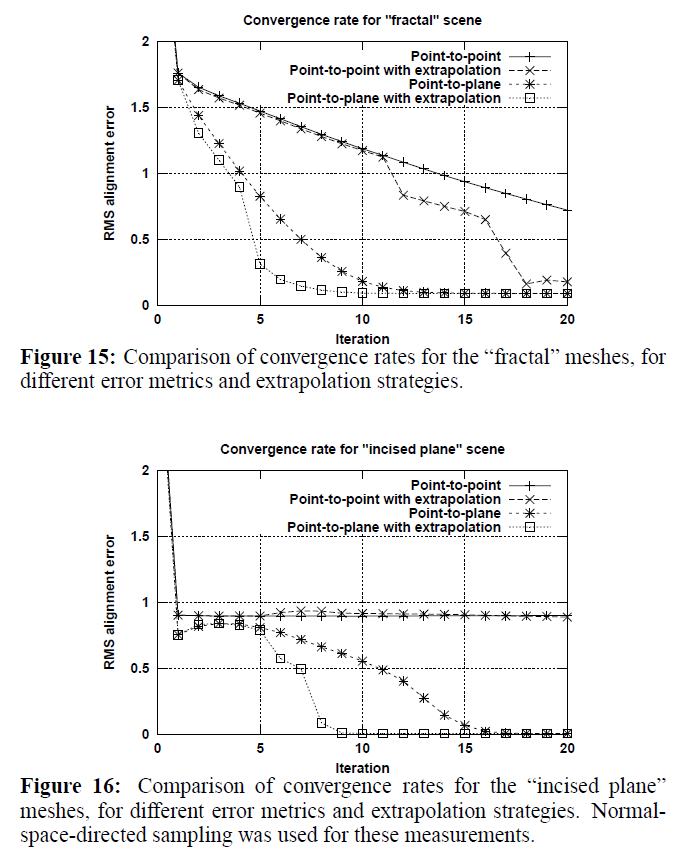 图5:论文[3]中不同ICP的对比。
图5:论文[3]中不同ICP的对比。
3. TSDF的更新
先介绍一个概念SDF(Signed Distance Function),SDF描述的是点到面的距离,在面上为0,在面的一边为正,另一边为负。TSDF(Truncated SDF)是只考虑面的邻域内的SDF值,邻域的最大值是max truncation的话,则实际距离会除以max truncation这个值,达到归一化的目的,所以TSDF的值在-1到+1之间,如图6所示。
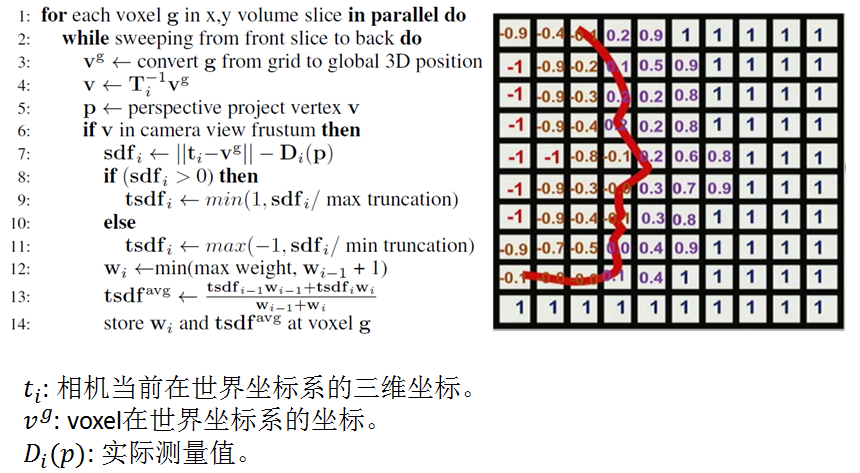 图6:TSDF的更新。
图6:TSDF的更新。
TSDF的具体算法也在图6中,利用GPU并行处理各个voxel。首先把每个voxel根据计算出的相机位置姿态投影到相机上,如果在相机的视椎内,则会有一个像素点和它对应,\(D_i(p)\)是这个像素点距离表面的实际测量值,\(t_i-v^g\)则是voxel到相机的距离,两者的差就是SDF值。然后用max truncation归一化得到当前TSDF值。接着,用加权平均的方式更新TSDF值。voxel越正对着相机(如图7所示),越靠近相机,权重越大,用公式表示就是:\(W(p)\propto cos(\theta)/R_k(u)\),\(u\)是\(p\)的像。但论文[1]中也提到把权重全部设为1,对TSDF做简单的平均,也可以取得很好的效果;而如图6算法第12行,设置max weight后,可以去除场景中动态物体的影响(这一点没有特别想明白)。
 图7:TSDF的权重和相机观察方向的关系。
图7:TSDF的权重和相机观察方向的关系。
4. 表面的估计
更新完TSDF值之后,就可以用TSDF来估计voxel/normal map。这样估计出来的voxel/normal map比直接用RGBD相机得到的深度图有更少的噪音,更少的孔洞(RGBD相机会有一些无效的数据,点云上表现出来的就是黑色的孔洞)。估计出的voxel/normal map与新一帧的测量值一起可以估算相机的位置姿态。具体的表面估计方法叫Raycasting。这种方法模拟观测位置有一个相机,从每个像素按内参\(K\)投射出一条射线,射线穿过一个个voxel,在射线击中表面时,必然穿过TSDF值为一正一负的两个紧邻的voxel(因为射线和表面的交点的TSDF值为0),表面就夹在这两个voxel里面。然后可以利用线性插值,根据两个voxel的位置和TSDF值求出精确的交点位置。这些交点的集合就呈现出三维模型的表面。
参考文献:
[1] Newcombe R A, Izadi S, Hilliges O, et al. KinectFusion: Real-time dense surface mapping and tracking[C]//Mixed and augmented reality (ISMAR), 2011 10th IEEE international symposium on. IEEE, 2011: 127-136.
[2] Izadi S, Kim D, Hilliges O, et al. KinectFusion: real-time 3D reconstruction and interaction using a moving depth camera[C]//Proceedings of the 24th annual ACM symposium on User interface software and technology. ACM, 2011: 559-568.
[3] Rusinkiewicz S, Levoy M. Efficient variants of the ICP algorithm[C]//3-D Digital Imaging and Modeling, 2001. Proceedings. Third International Conference on. IEEE, 2001: 145-152.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号