
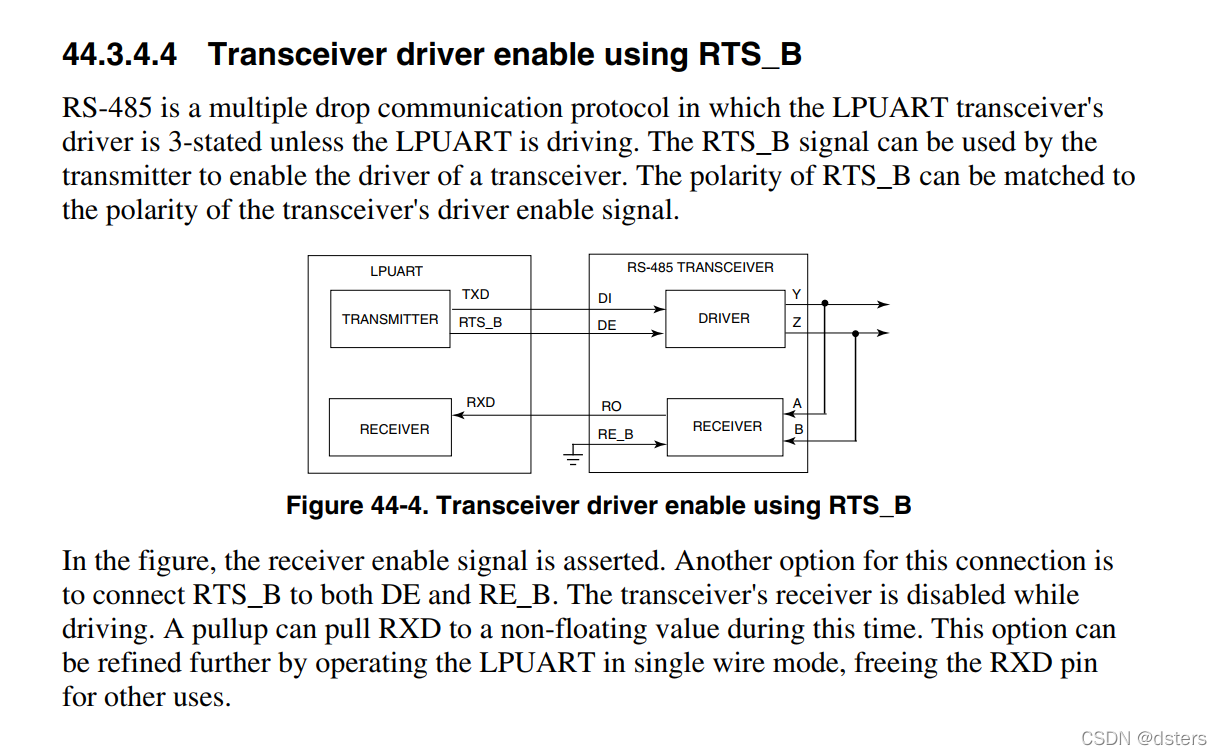
RT1021使用RTS引脚控制RS485芯片收发使能

串口初始化完成后增加两行代码:
DEMO_LPUART->MODIR |= LPUART_MODIR_TXRTSE_MASK;
DEMO_LPUART->MODIR |= LPUART_MODIR_TXRTSPOL_MASK;
即可使用RTS引脚直接控制RS485收发器收发使能。
/* * Copyright 2017 NXP * All rights reserved. * * SPDX-License-Identifier: BSD-3-Clause */ #include "pin_mux.h" #include "clock_config.h" #include "board.h" #include "fsl_lpuart.h" #include "fsl_debug_console.h" /******************************************************************************* * Definitions ******************************************************************************/ #define DEMO_LPUART LPUART2 #define DEMO_LPUART_CLK_FREQ BOARD_DebugConsoleSrcFreq() #define DELAY_TIME 100000U #define TRANSFER_SIZE 256U /*! Transfer dataSize */ #define TRANSFER_BAUDRATE 115200U /*! Transfer baudrate - 115200 */ /******************************************************************************* * Prototypes ******************************************************************************/ /* LPUART user callback */ void LPUART_UserCallback(LPUART_Type *base, lpuart_handle_t *handle, status_t status, void *userData); /******************************************************************************* * Variables ******************************************************************************/ uint8_t transferRxData[TRANSFER_SIZE] = {0U}; uint8_t transferTxData[TRANSFER_SIZE] = {0U}; lpuart_handle_t g_lpuartHandle; volatile bool isTransferCompleted = false; /******************************************************************************* * Code ******************************************************************************/ /* LPUART user callback */ void LPUART_UserCallback(LPUART_Type *base, lpuart_handle_t *handle, status_t status, void *userData) { if (kStatus_LPUART_TxIdle == status) { isTransferCompleted = true; } } /*! * @brief Main function */ int main(void) { uint32_t i = 0U, errCount = 0U; status_t status = 0; lpuart_config_t config; lpuart_transfer_t sendXfer; BOARD_ConfigMPU(); BOARD_InitBootPins(); BOARD_InitBootClocks(); BOARD_InitDebugConsole(); PRINTF("This is LPUART hardware flow control example on one board.\r\n"); PRINTF("This example will send data to itself and will use hardware flow control to avoid the overflow.\r\n"); PRINTF("Please make sure you make the correct line connection. Basically, the connection is: \r\n"); PRINTF(" LPUART_TX -- LPUART_RX \r\n"); PRINTF(" LPUART_RTS -- LPUART_CTS \r\n"); /* * config.baudRate_Bps = 115200U; * config.parityMode = kLPUART_ParityDisabled; * config.stopBitCount = kLPUART_OneStopBit; * config.txFifoWatermark = 0; * config.rxFifoWatermark = 0; * config.enableTx = false; * config.enableRx = false; */ LPUART_GetDefaultConfig(&config); config.baudRate_Bps = BOARD_DEBUG_UART_BAUDRATE; config.enableTx = true; config.enableRx = true; //config.enableRxRTS = true; //config.enableTxCTS = true; LPUART_Init(DEMO_LPUART, &config, DEMO_LPUART_CLK_FREQ); DEMO_LPUART->MODIR |= LPUART_MODIR_TXRTSE_MASK; DEMO_LPUART->MODIR |= LPUART_MODIR_TXRTSPOL_MASK; LPUART_TransferCreateHandle(DEMO_LPUART, &g_lpuartHandle, LPUART_UserCallback, NULL); while(1){ /* Set up the transfer data */ for (i = 0U; i < TRANSFER_SIZE; i++) { transferTxData[i] = i % 256U; transferRxData[i] = 0U; } sendXfer.data = (uint8_t *)transferTxData; sendXfer.dataSize = TRANSFER_SIZE; LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &sendXfer); /* Delay for some time to let the RTS pin dessart. */ for (i = 0U; i < DELAY_TIME; i++) { __NOP(); } } /* Set up the transfer data */ for (i = 0U; i < TRANSFER_SIZE; i++) { transferTxData[i] = i % 256U; transferRxData[i] = 0U; } sendXfer.data = (uint8_t *)transferTxData; sendXfer.dataSize = TRANSFER_SIZE; LPUART_TransferSendNonBlocking(DEMO_LPUART, &g_lpuartHandle, &sendXfer); /* Delay for some time to let the RTS pin dessart. */ for (i = 0U; i < DELAY_TIME; i++) { __NOP(); } status = LPUART_ReadBlocking(DEMO_LPUART, transferRxData, TRANSFER_SIZE); if (kStatus_Success != status) { PRINTF(" Error occurred when LPUART receiving data.\r\n"); } /* Wait for the transmit complete. */ while (!isTransferCompleted) { } for (i = 0U; i < TRANSFER_SIZE; i++) { if (transferTxData[i] != transferRxData[i]) { errCount++; } } if (errCount) { PRINTF("Data not matched! Transfer error.\r\n"); } else { PRINTF("Data matched! Transfer successfully.\r\n"); } /* Deinit the LPUART. */ LPUART_Deinit(DEMO_LPUART); while (1) { } }


 浙公网安备 33010602011771号
浙公网安备 33010602011771号